pcl中的一些常用函数记录笔记
Posted 非晚非晚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了pcl中的一些常用函数记录笔记相关的知识,希望对你有一定的参考价值。
文章目录
- 1. 删除无效点(nan点)——pcl::removeNaNFromPointCloud
- 2. 判断单个点是否是无效点——pcl::isFinite
- 3. 求点的极值——pcl::getMinMax3D
- 4. 点云与点云ptr类型互相转换
- 5. 点云拷贝——pcl::copyPointCloud
- 6. 点云的插入与删除——insert、push_back和erase
- 7. 指定点云的颜色显示——PointCloudColorHandlerCustom
- 8. PointCloud和PCLPointCloud2类型互相转换——toPCLPointCloud2和fromPCLPointCloud2
- 9. 提取已知索引之外的点云—— pcl::ExtractIndices
- 10. 计算质心——pcl::compute3DCentroid
- 11. 计算两个向量之间的夹角——pcl::getAngle3D
1. 删除无效点(nan点)——pcl::removeNaNFromPointCloud
NaNs表明测量传感器距离到该点的距离值是有问题的,可能是因为传感器太近或太远,或者因为表面反射。那么当存在无效点云的NaNs值作为算法的输入的时候,可能会引起很多问题。
注意一定要设置cloud_ptr->is_dense = false,否则不能使用pcl方法删除无效点。
- 删除nan点的函数形式:
pcl::removeNaNFromPointCloud(laserCloudIn, laserCloudIn, indices);
函数有三个参数:分别为输入点云,输出点云及对应保留的索引。
- 使用方法:
void removeNan(pcl::PointCloud<pcl::PointXYZ>::Ptr in, pcl::PointCloud<pcl::PointXYZ>::Ptr out)
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*in, *out, indices);
- 或者使用遍历的方法:
for (size_t i = 0; i < scan_ptr->points.size(); ++i)
const auto &pt = scan_ptr->points[i];
if (std::isnan(pt.x) || std::isnan(pt.y) || std::isnan(pt.z))
continue;
- 代码举例
#include <iostream>
#include <pcl/filters/filter.h>
int main(int argc, char **argv)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
/*******************************填充点云*************************************/
cloud_ptr->width = 10;
cloud_ptr->height = 1;
cloud_ptr->points.resize(cloud_ptr->width * cloud_ptr->height);
for (auto &point : *cloud_ptr) //填充点云
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
//加入nan点
cloud_ptr->points[9].x = std::nan("1");//或者使用std::numeric_limits<float>::quiet_NaN()
cloud_ptr->points[9].y = std::nan("1");
cloud_ptr->points[9].z = std::nan("1");
cloud_ptr->is_dense = false;//如果不加这个,就不认为有nan点
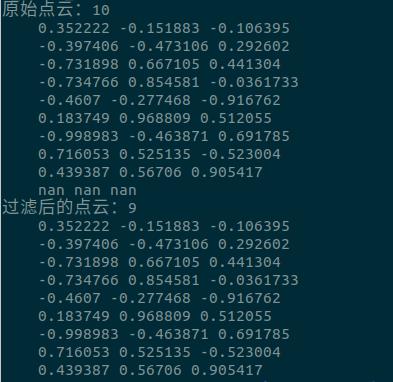
std::cout << "原始点云:" << cloud_ptr->points.size()<<std::endl;
for (const auto &point : *cloud_ptr)
std::cout << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
/*******************************过滤nan点*************************************/
pcl::PointCloud<pcl::PointXYZ>::Ptr output_ptr(new pcl::PointCloud<pcl::PointXYZ>);
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*cloud_ptr, *output_ptr, indices);
std::cout << "过滤后的点云:" <<output_ptr->points.size()<< std::endl;
for (const auto &point : *output_ptr)
std::cout << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
2. 判断单个点是否是无效点——pcl::isFinite
#include <pcl/point_types.h>
int main(int argc, char **argv)
pcl::PointXYZ p_valid;
p_valid.x = 0;
p_valid.y = 0;
p_valid.z = 0;
std::cout << "Is p_valid valid? " << pcl::isFinite(p_valid) << std::endl;//1,true
pcl::PointXYZ p_invalid;
p_invalid.x = std::numeric_limits<float>::quiet_NaN();
p_invalid.y = 0;
p_invalid.z = 0;
std::cout << "Is p_invalid valid? " << pcl::isFinite(p_invalid) << std::endl;//0,false
3. 求点的极值——pcl::getMinMax3D
#include <pcl/point_types.h>
#include <pcl/common/common.h>
//方法一:带索引
void pcl::getMinMax3D ( const pcl::PointCloud< PointT > & cloud,
const std::vector< int > & indices,
Eigen::Vector4f & min_pt,
Eigen::Vector4f & max_pt
)
//方法二:不带索引
void pcl::getMinMax3D ( const pcl::PointCloud< PointT > & cloud,
Eigen::Vector4f & min_pt,
Eigen::Vector4f & max_pt
)
cloud为输入点云,输出min_pt为所有点中最小的x值,y值,z值,输出max_pt为为所有点中最大的x值,y值,z值。
#include <iostream>
#include <pcl/common/common.h>
int main(int argc, char **argv)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
/*******************************填充点云*************************************/
cloud_ptr->width = 5;
cloud_ptr->height = 1;
cloud_ptr->points.resize(cloud_ptr->width * cloud_ptr->height);
for (auto &point : *cloud_ptr) //填充点云
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
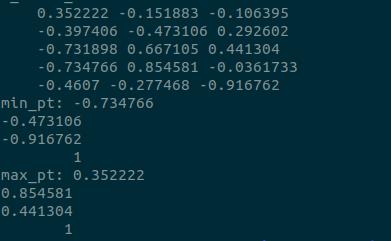
for (const auto &point : *cloud_ptr)
std::cout << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
/*******************************求点的极值*************************************/
Eigen::Vector4f min_pt, max_pt;
std::vector<int> indices = 0, 1, 2, 3, 4;
//pcl::getMinMax3D(*cloud_ptr, indices, min_pt, max_pt);
pcl::getMinMax3D(*cloud_ptr, min_pt, max_pt);
std::cout << "min_pt: " << min_pt << std::endl;
std::cout << "max_pt: " << max_pt << std::endl;
4. 点云与点云ptr类型互相转换
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
//1. pcl::PointIndices-->pcl::PointIndices::Ptr的转化
pcl::PointIndices inliers;
pcl::PointIndices::Ptr inliers_ptr(new pcl::PointIndices(inliers));
//2. pcl::PointIndices::Ptr-->pcl::PointIndices的转化
pcl::PointIndices inliers;
pcl::PointIndices::Ptr inliers_ptr;
inliers=*inliers_ptr;
//3. PointCloud<PointT>::Ptr-->PointCloud<PointT>的转化
PointCloud<PointT>::Ptr cloud_ptr(new pcl::PointCloud<PointT>);
PointCloud<PointT> cloud;
cloud=*cloud_ptr;
//4. PointCloud<PointT>->PointCloud<PointT>::Ptr-的转化
PointCloud<PointT>::Ptr cloud_ptr(new pcl::PointCloud<PointT>);
PointCloud<PointT> cloud;
cloud_ptr = cloud.makeShared();
5. 点云拷贝——pcl::copyPointCloud
//部分拷贝,索引拷贝
std::vector<int > indices = 1, 2, 5 ;
pcl::copyPointCloud (const pcl::PointCloud &cloud_in, const std::vector &indices,pcl::PointCloud &cloud_out)
//全部拷贝
pcl::copyPointCloud (const pcl::PointCloud &cloud_in,pcl::PointCloud &cloud_out)
6. 点云的插入与删除——insert、push_back和erase
#include <pcl/common/impl/io.hpp>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
int main(int argc, char **argv)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
/*******************************填充点云*************************************/
cloud_ptr->width = 5;
cloud_ptr->height = 1;
cloud_ptr->points.resize(cloud_ptr->width * cloud_ptr->height);
for (auto &point : *cloud_ptr) //填充点云
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
/*****************删除*****************/
pcl::PointCloud<pcl::PointXYZ>::iterator index = cloud_ptr->begin();
cloud_ptr->erase(index); //删除第1个
index = cloud_ptr->begin() + 5;
cloud_ptr->erase(index);//删除第5个
/***************插入****************/
pcl::PointXYZ point = 1, 1, 1;
cloud_ptr->insert(cloud_ptr->begin() + 5, point); //在索引号为5的位置1上插入一点,原来的点后移一位
cloud_ptr->push_back(point); //从点云最后面插入一点
std::cout << cloud_ptr->points[5].x; //输出1
7. 指定点云的颜色显示——PointCloudColorHandlerCustom
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
int main(int argc, char **argv)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
/*******************************填充点云*************************************/
cloud_ptr->width = 5;
cloud_ptr->height = 1;
cloud_ptr->points.resize(cloud_ptr->width * cloud_ptr->height);
for (auto &point : *cloud_ptr) //填充点云
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
pcl::visualization::PCLVisualizer viewer("pointcloud viewer");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> sig(cloud_ptr, 0, 234, 0);
viewer.addPointCloud(cloud_ptr, sig, "cloud");
while (!viewer.wasStopped())
viewer.spinOnce();
return 1;
8. PointCloud和PCLPointCloud2类型互相转换——toPCLPointCloud2和fromPCLPointCloud2
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
int main(int argc, char **argv)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
/*******************************填充点云*************************************/
cloud_ptr->width = 5;
cloud_ptr->height = 1;
cloud_ptr->points.resize(cloud_ptr->width * cloud_ptr->height);
for (auto &point : *cloud_ptr) //填充点云
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
pcl::PCLPointCloud2 cloud2;
pcl::toPCLPointCloud2(*cloud_ptr, cloud2);//PointCloud==》PCLPointCloud2
pcl::fromPCLPointCloud2(cloud2, *cloud_ptr);//PCLPointCloud2==》PointCloud
return 1;
9. 提取已知索引之外的点云—— pcl::ExtractIndices
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/extract_indices.h>
int main(int argc, char **argv)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
/*******************************填充点云*************************************/
cloud_ptr->width = 5;
cloud_ptr->height = 1;
cloud_ptr->points.resize(cloud_ptr->width * cloud_ptr->height);
for (auto &point : *cloud_ptr) //填充点云
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
std::cout << "原始点: " << std::endl;
for (const auto &point : *cloud_ptr)
std::cout << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
inliers->indices = 1, 2;
std::vector<int> indexes = 1