Moveit报错: Unable to connect to move_group action server ‘move_group‘ within allotted time (30s)
Posted Sawyer_CAo
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Moveit报错: Unable to connect to move_group action server ‘move_group‘ within allotted time (30s)相关的知识,希望对你有一定的参考价值。
问题描述:在运行Moveit生成的demo.launch文件时发生如下错误:
[ INFO] [1637323796.299964538]: Failed to call service get_planning_scene, have you launched move_group? at /tmp/binarydeb/ros-kinetic-moveit-ros-planning-0.9.18/planning_scene_monitor/src/planning_scene_monitor.cpp:491
[ INFO] [1637323808.478086679]: Constructing new MoveGroup connection for group 'robot' in namespace ''
[ERROR] [1637323838.530833957]: Unable to connect to move_group action server 'move_group' within allotted time (30s)问题出现原因:根据github大佬的解释,该问题产生的原因可能是rviz在MotionPlanning启用显示的同时启动。个人猜测, 可能由于加载的模型过于复杂,导致显示实例化了MoveGroupInterface30 秒的超时时间。
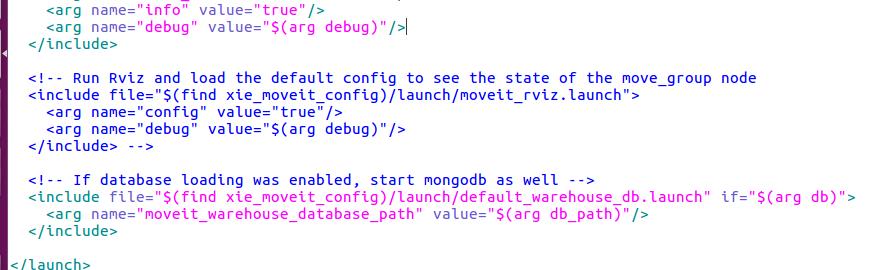
问题解决:将demo.launch文件中rviz节点注释掉,在运行时就不会报错(运行时间可能比较长,请耐心等待)
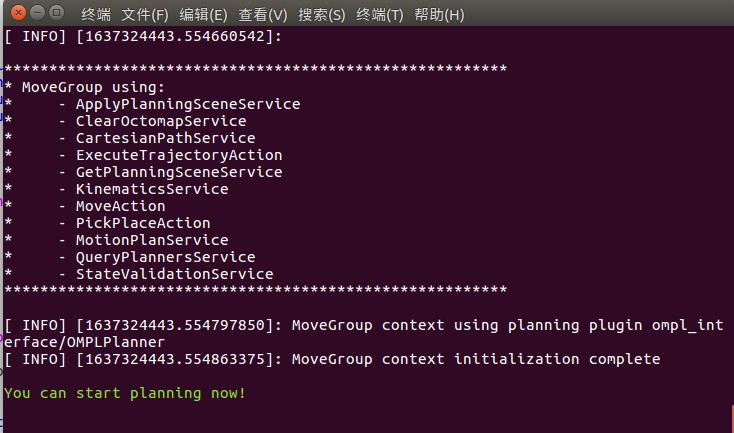
运行成功后会出现一行绿字You can start planning now!
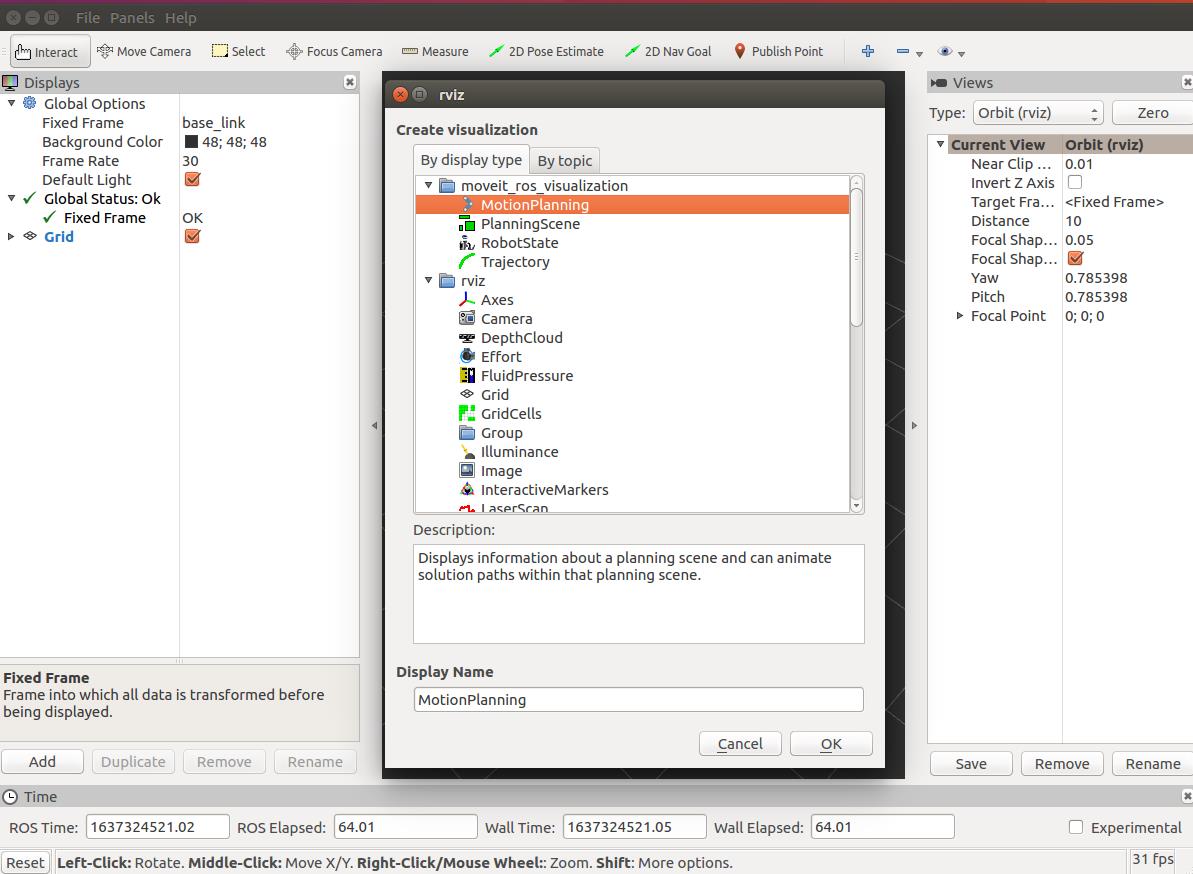
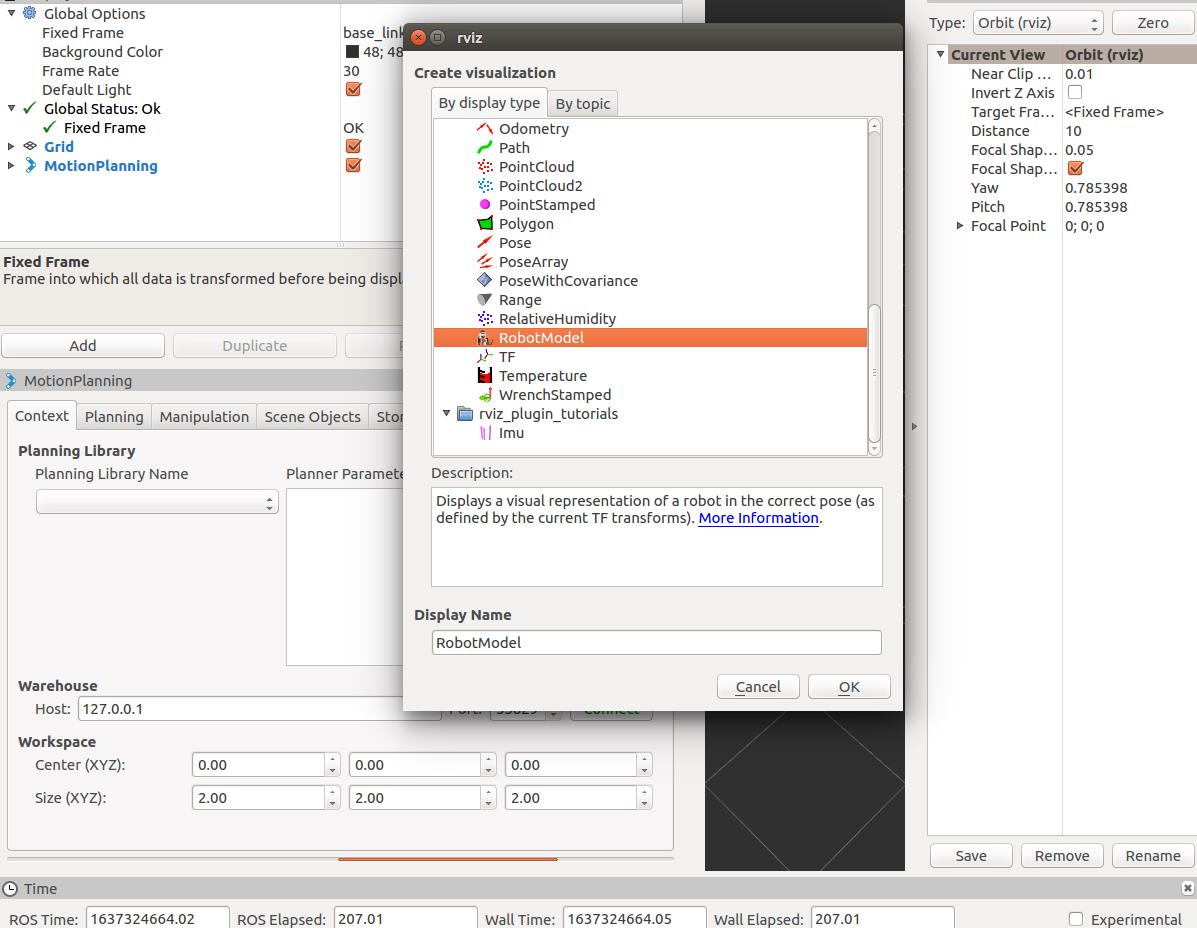
重新开启一个命令窗口,在窗口中运行rviz。
rosrun rviz rviz
以上是关于Moveit报错: Unable to connect to move_group action server ‘move_group‘ within allotted time (30s)的主要内容,如果未能解决你的问题,请参考以下文章
git clone报错:fatal: unable to access ‘‘: SSL certificate problem: unable to get local issuer cer
git clone报错:fatal: unable to access ‘‘: SSL certificate problem: unable to get local issuer cer
tomcat报错-----》Unable to open debugger port IDEA Unable to open debugger port
Excel Web Access 报错:Unable to Load Workbook