高通Cam-X平台 Camera移植
Posted bobuddy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了高通Cam-X平台 Camera移植相关的知识,希望对你有一定的参考价值。
高通Cam-X平台 Camera移植
注:此文档以在高通8916平台移植OV5648为例,给大家讲解android SOC的底层Camera。
Reference:
- 基于qualcomm平台的Camera Bring up_Winston-CSDN博客
- 【Camera专题】Camera dtsi 完全解析 - 简书
- 80-p9301-97_l_camera_sensor_driver_bringup_guide
介绍
camera原理:外部光线穿过lens后,经过color filter滤波后照射到sensor面上,sensor将从lens上传到过来的光线转换成电信号,再通过内部的AD转换为数字信号,如果sensor没有集成DSP,则通过DVP的方式传输到baseband,此时的数据格式是RAW DATA。必须通过平台的isp来处理。如果集成了DSP,这RAW DATA数据经过AWB,color matrix,lens shading,gamma,sharpness,AE和de-noise处理后输出YUV或者RGB格式的数据。最后会由CPU送到framebuffer中进行显示。
我们所说的Camera实际上是指Camera模组,包括以下部分:
- 感光元件:Sensor
- 对焦马达:Actuator
- 储存介质:EEPROM
- 闪光灯:Flash
- 总线:CSIPHY、CSID
高通平台的Camera方案
高通Camera的调试主要是以Senor的bring-up以及tuning。注意这里的Sensor是在Camera中,而不是传统意义上的Senor(例如三轴传感器等)。
顺带提一下,高通平台的Camera架构从以前用的mm-camera转向camx-chi,完全是两样不同的东西:软件架构不同、代码位置不同。
CamX架构:
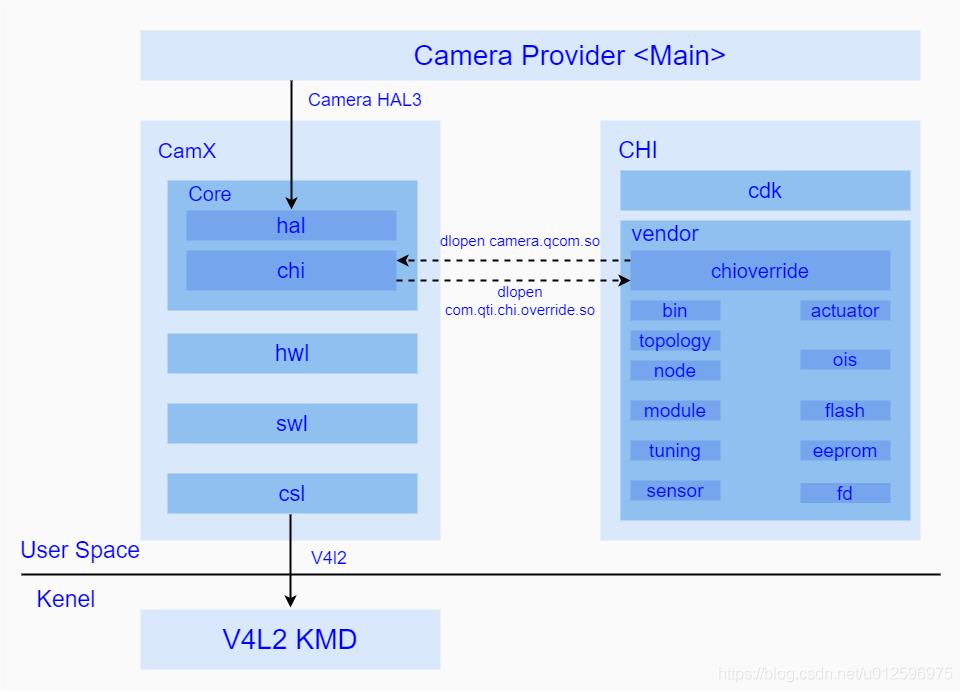
但是如果没有特殊的客制化需求,一般不在框架中进行修改。后面我们会专门介绍这个部分。
准备
准备资料
调试之前,需要有下列资料:
| 文档清单 |
|---|
| Sensor 以及 AF 的 数据手册 |
| 供应商针对高通 Chromatix 工具调试好的Chromatix代码 |
| AF的用户空间驱动、以及AF效果代码 |
| EEPROM用户空间驱动和EEPROM效果代码 |
确定硬件
MIPI相关:MIPI CLK 以及 DATA 线
复位:下电PWDW 以及 Reset
供电:AVDD(2.8V)、DVDD(1.2V)、IOVDD(1.8V)、AFVDD(2.8V)
通信相关:I2C等通信总线,具体根据模组的情况以及SOC平台来决定。
高通 的CCI 接口,不能作为普通 i2c 使用,只能连接 camera。
Cam-x平台添加驱动
Kernel 部分
Device Tree
包括Sensor、GPIO、供电以及驱动控制所需的定义等
1、Sensor:
- 供电:PMIC
- GPIO、Pinctrl
2、AF:供电、最大最小电压以及工作模式
3、EEPROM
4、闪光灯
代码路径:kernel/arch/arm/boot/dts/qcom
文件名:msm8916-camera-sensor-qrd-skui.dtsi
需添加的代码:
qcom,camera@6a //这需要与1.3节中添加的Clock地址向对应。
cell-index = <0>; //唯一标识,用来区分多个摄像头。
compatible = "ovti,ov5648";// 这要与驱动代码中的名字相对应,即:static const struct of_device_id ov5648_dt_match[] = ..
.compatible = "ovti,ov5648",
.data = &ov5648_s_ctrl
,
reg = <0x6a 0x0>; 这需要与1.3节中添加的Clock地址向对应。
qcom,slave-id = <0x6c 0x300a 0x5648>;
// 0x6c为摄像头的I2C地址,0x300a为摄像头存放ID的寄存器地址,0x5648为摄像头的ID,这都需要查看datasheet或直接问模组厂。
qcom,csiphy-sd-index = <1>; // 用于接收传感器数据的csiphy实例,可以配置的值:0,1,2
qcom,csid-sd-index = <1>; // 用于接收传感器数据的csid核心实例,可以配置的值:0,1,2
// 以上两个设置需要查看主板原理图,看主板上摄像头是接在CSI0还是CSI1上的,一般后摄像头都会接到CSI0上,前摄像头会接在CSI1上。
qcom,mount-angle = <270>; // 摄像头在设备上的物理安装角度(sensor raw图默认的方向都是90或者270!)
// 该参数为摄像头预览界面的方向,如果预览方向有被旋转,可以通过修改这个参数进行修正。
qcom,eeprom-src = <&eeprom0>; // 如果支持otp(eeprom)的话,就配置成各种的eeprom节点,否则不配置。
qcom,actuator-src = <&actuator0>; // 如果支持马达的话,就配置成各自的马达节点,否则不配置。
qcom,led-flash-src = <&led_flash0>; // 如果支持闪光灯的话,就配置成各自的闪光灯节点,否则不配置。
qcom,sensor-name = "ov5648_oty5f03";
// 这个对应vendor中lib文件夹的文件名,具体可参看2.2节。
cam_vdig-supply = <&pm8916_l2>;
cam_vana-supply = <&pm8916_l17>;
cam_vio-supply = <&pm8916_l6>;
// 以上三个参数分别对应DVDD(vdig)、AVDD(vana)、DOVDD(vio)三个电压,具体所接的是哪路电压,需要参看主板原理图。
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana";
qcom,cam-vreg-type = <0 1 0>;
qcom,cam-vreg-min-voltage = <1200000 0 2850000>;
qcom,cam-vreg-max-voltage = <1200000 0 2850000>;
qcom,cam-vreg-op-mode = <200000 0 80000>;
//这五个配置要分别与上面的三个电压一一对应(按照从上到下的顺序),如果有对焦马达的还要在后面填一路AF的电压,如下所示:
cam_vaf-supply = <&pm8916_l10>; // avdd供电,是否是要配置,配置成哪路系统供电,需要和硬件沟通!
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana", "cam_vaf";
/* 配置sensor需要的所有电源。
可配置选项:"cam_vdig", "cam_vana", "cam_vio", "cam_vaf"
分别代表含义:dvdd,avdd,iovdd,af供电
不一定要全部配置,用到哪路配哪路,有些电路硬件自己拉高了,具体跟硬件沟通。
*/
qcom,cam-vreg-type = <0 1 0 0>; // 指定用于此sensor的电源类型,0表示ldo电源,1表示lvs电源。默认配0.
qcom,cam-vreg-min-voltage = <1200000 0 2850000 2800000>;
qcom,cam-vreg-max-voltage = <1200000 0 2850000 2800000>; // 供电电源的最大值,单位mV
qcom,cam-vreg-op-mode = <200000 0 80000 100000>; // 供电电源的最佳电压水平
// 上述电压值分别是按`qcom,cam-vreg-name = "cam_vdig","cam_vio","cam_vana","cam_vaf";` 顺序一一对应的!
pinctrl-names = "cam_default", "cam_suspend"; // 默认就这么配置,前面代表clk,后面代表reset脚和standby脚,唤醒作用。
pinctrl-0 = <&cam_sensor_mclk1_default &cam_sensor_front_default>; // 按照顺序一一对应的
pinctrl-1 = <&cam_sensor_mclk1_sleep &cam_sensor_front_sleep>; // 按照顺序一一对应的
// 以上这两个需要区分的就是前后摄像头的配置不一样,上面这种配置是前摄像头的配置,后摄像头的配置如下所示:
/* 如果是后摄像头,配置如下所示
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk0_default &cam_sensor_rear_default>;
pinctrl-1 = <&cam_sensor_mclk0_sleep &cam_sensor_rear_sleep>;
*/
gpios = <&msm_gpio 27 0>, <&msm_gpio 28 0>, <&msm_gpio 33 0>, <&msm_gpio 119 0>;
qcom,gpio-reset = <1>; // 传感器 reset脚的索引
qcom,gpio-standby = <2>; // 传感器 standby脚的索引
qcom,gpio-vana = <3>;
qcom,gpio-req-tbl-num = <0 1 2 3>; // mclk,reset,stanby的索引;
// 由于mclk为0,qcom,gpio-reset = <1>,qcom,gpio-standby = <2>;因此配置成 <0,1,2,3>
qcom,gpio-req-tbl-flags = <1 0 0 0>; // gpio的方向,mclk为1,表示输出,reset、standby和vana都为0,表示输入。
qcom,gpio-req-tbl-label = "CAMIF_MCLK", "CAM_RESET", "CAM_STANDBY", "CAM_VANA";
/* gpio的名称。
常用值:
"CAMIF_MCLK", "CAM_RESET","CAM_STANDBY";
"CAMIF_MCLK0", "CAM_RESET0","CAM_STANDBY0";
"CAMIF_MCLK1", "CAM_RESET1","CAM_STANDBY1";
"CAMIF_MCLK2", "CAM_RESET2","CAM_STANDBY2";
*/
// 上面这部分主要是配置GPIO口,这里需要注意的是gpios的数组要与gpio-req-tbl-label的名字一一对应,即gpio 27对应CAMIF_MCLK,而reset 、standby 、vana 分别对应gpios数组中的第1、2、3参数,gpio-req-tbl-num也对应于gpios中数组的标号。
qcom,gpio-set-tbl-num = <1 1>;
qcom,gpio-set-tbl-flags = <0 2>;
qcom,gpio-set-tbl-delay = <1000 4000>;
// 这三个参数是前摄像头的固定模式,后摄像头不需要这个设置,在配置后摄像头时直接去掉即可。
qcom,csi-lane-assign = <0x4320>;
// 该参数为主芯片mipi Lane个数配置寄存器。
qcom,csi-lane-mask = <0x3>;
// 该参数为配置mipi Lane个数,0x3为1组数据线加1组时钟线,0x07为2组数据线加1组时钟线,0x1f为4组数据线加1主时钟线。
qcom,sensor-position = <1>;
// 该参数,如果添加的是前摄像头需要配置成1,如果是后摄像头需要配置成0
qcom,sensor-mode = <1>; // 传感器模式支持
/*
0 -> back camera 2D
1 -> front camera 2D
2 -> back camera 3D
3 -> back camera int 3D
*/
qcom,cci-master = <0>; // sensor使用的master id。可选值: `0 -> MASTER 0`、`1 -> MASTER 1`
status = "ok";
clocks = <&clock_gcc clk_mclk1_clk_src>, <&clock_gcc clk_gcc_camss_mclk1_clk>; // 设备使用的时钟
clock-names = "cam_src_clk", "cam_clk"; // 设备所需时钟的名称
// 上面两个Clocks和Clock-names是前摄像头的配置,后摄像头的配置如下:
/*
clocks = <&clock_gcc clk_mclk0_clk_src>, <&clock_gcc clk_gcc_camss_mclk0_clk>;
clock-names = "cam_src_clk", "cam_clk";
*/
;
另外如果有对焦马达还需要修改对焦马达的地址,如下所示:
actuator0: qcom,actuator@6e
cell-index = <3>;
reg = <0x18>;
compatible = "qcom,actuator";
qcom,cci-master = <0>;
;
编译系统
代码路径:kernel/arch/arm/configs
文件名:msm8916_defconfig 和msm8916-perf_defconfig
需添加的代码:CONFIG_OV5648=y
Clock
代码路径:kernel/arch/arm/mach-msm
文件名:clock-8226.c
需添加的代码:
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "6f.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk1_clk_src.c, "90.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "6d.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "6a.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "6c.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "20.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "78.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "6f.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk1_clk.c, "90.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "6d.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "6a.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "6c.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "78.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "20.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "62.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "62.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "0.qcom,camera"),
CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "1.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "0.qcom,camera"),
CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "1.qcom,camera"),
需要注意的是这里的标示(如:6a)不能重复,并且添加的时候需要同时添加一组代码。
添加编译系统
Kconfig和Makefile文件中添加对应IC代码:
代码路径:
- Kconfig:
kernel/drivers/media/platform/msm/camera_v2/Kconfig - Makefile:
kernel/drivers/media/platform/msm/camera_v2/sensor/Makefile
添加Kconfig
config OV5648
bool "Sensor OV5648 (BAYER 5M)"
depends on MSMB_CAMERA
—help—
OmniVision 5 MP Bayer Sensor, only use 1 mipi lane,
preview set to 1296*972 at 30 fps,
snapshot set to 2592*1944 at 12 fps,
This sensor driver does not support auto focus.
添加Makefile
obj-$(CONFIG_OV5648) = ov5648.o
Camera驱动
代码路径:kernel/drivers/media/platform/msm/camera_v2sensor
文件名:ov5648.c
需添加的代码
该部分主要要注意电源的设置,它包括传感器电源信息,IO控制和Mclk。
通常情况下,无需修改该部分内容,因为大部分配置已在设备树文件中完成;但可以修改.delay = 0 字段来和时间匹配。
static struct msm_sensor_power_setting ov5648_power_setting[] =
.seq_type = SENSOR_VREG,
.seq_val = CAM_VIO,
.config_val = 0,
.delay = 0,
,
.seq_type = SENSOR_VREG,
.seq_val = CAM_VAF,
.config_val = 0,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VDIG,
.config_val = GPIO_OUT_LOW,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VDIG,
.config_val = GPIO_OUT_HIGH,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VANA,
.config_val = GPIO_OUT_HIGH,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_STANDBY,
.config_val = GPIO_OUT_LOW,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_STANDBY,
.config_val = GPIO_OUT_HIGH,
.delay = 10,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_RESET,
.config_val = GPIO_OUT_LOW,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_RESET,
.config_val = GPIO_OUT_HIGH,
.delay = 10,
,
.seq_type = SENSOR_CLK,
.seq_val = SENSOR_CAM_MCLK,
.config_val = 23880000,
.delay = 10,
,
.seq_type = SENSOR_I2C_MUX,
.seq_val = 0,
.config_val = 0,
.delay = 0,
,
;
static struct msm_sensor_power_setting ov5648_power_down_setting[] =
.seq_type = SENSOR_VREG,
.seq_val = CAM_VIO,
.config_val = 0,
.delay = 0,
,
.seq_type = SENSOR_VREG,
.seq_val = CAM_VAF,
.config_val = 0,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VANA,
.config_val = GPIO_OUT_LOW,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_STANDBY,
.config_val = GPIO_OUT_LOW,
.delay = 5,
,
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_RESET,
.config_val = GPIO_OUT_LOW,
.delay = 10,
,
.seq_type = SENSOR_CLK,
.seq_val = SENSOR_CAM_MCLK,
.config_val = 23880000,
.delay = 10,
,
.seq_type = SENSOR_I2C_MUX,
.seq_val = 0,
.config_val = 0,
.delay = 0,
,
;
Vendor部分
Makefile
在Makefile文件中添加IC代码:
代码路径:qcom/proprietary/common/config
文件名:device-xx-vendor.mk
需添加的代码:
MM_CAMERA = libchromatix_ov5648_oty5f03_common
MM_CAMERA = libchromatix_ov5648_oty5f03_default_video
MM_CAMERA = libchromatix_ov5648_oty5f03_preview
MM_CAMERA = libchromatix_ov5648_oty5f03_snapshot
MM_CAMERA = libchromatix_ov5648_oty5f03_zsl
MM_CAMERA = libmmcamera_ov5648_oty5f03
注意:如果这里没有添加以上代码,在编译的时候就不会生成相应的so文件。
这so文件可以在src/LINUX/android/out/target/product/msm8916_32/system/vendor/lib目录下找到:
libchromatix_ov5648_oty5f03_common.so
libchromatix_ov5648_oty5f03_default_video.so
libchromatix_ov5648_oty5f03_preview.so
libchromatix_ov5648_oty5f03_snapshot.so
libchromatix_ov5648_oty5f03_zsl.so
libmmcamera_ov5648_oty5f03.so
Lib驱动
代码路径:
vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/sensor_libs
文件夹名:ov5648_oty5f03
需添加的代码如下。
移植相机接口配置
这部分内容定义了传感器接口配置,包括I2C和MIPI。请确认设置不会和dtsi文件中的类似内容冲突。
static struct msm_camera_sensor_slave_info sensor_slave_info =
.camera_id = CAMERA_0,
.slave_addr = 0x6c,
.addr_type = MSM_CAMERA_I2C_WORD_ADDR,
.sensor_id_info =
.sensor_id_reg_addr = 0x300a,
.sensor_id = 0x5648,
,
.power_setting_array =
.power_setting = ov5648_oty5f03_power_setting,
.size = ARRAY_SIZE(ov5648_oty5f03_power_setting),
.power_down_setting = ov5648_oty5f03_power_down_setting,
.size_down = ARRAY_SIZE(ov5648_oty5f03_power_down_setting),
,
;
static sensor_output_t sensor_output =
.output_format = SENSOR_BAYER,
.connection_mode = SENSOR_MIPI_CSI,
.raw_output = SENSOR_10_BIT_DIRECT,
;
#ifndef VFE_40
static struct csi_lane_params_t csi_lane_params =
.csi_lane_assign = 0xE4,
.csi_lane_mask = 0x3,
.csi_if = 1,
.csid_core = 0,
.csi_phy_sel = 0,
;
#else
static struct csi_lane_params_t csi_lane_params =
.csi_lane_assign = 0x4320,
.csi_lane_mask = 0x3,
.csi_if = 1,
.csid_core = 0,
.csi_phy_sel = 1,
;
#endif
移植传感器输出配置
这部分内容介绍了传感器不同模式的配置和设置,包含各模式的I2C 寄存器设备、CSI参数、crop参数、传感器输出信息和chormatix数组。这些配置的数组大小应和传感器支持的模式种类相同。
static struct msm_camera_i2c_reg_setting res_settings[] =
.reg_setting = res0_reg_array,
.size = ARRAY_SIZE(res0_reg_array),
.addr_type = MSM_CAMERA_I2C_WORD_ADDR,
.data_type = MSM_CAMERA_I2C_BYTE_DATA,
.delay = 0,
,
.reg_setting = res1_reg_array,
.size = ARRAY_SIZE(res1_reg_array),
.addr_type = MSM_CAMERA_I2C_WORD_ADDR,
.data_type = MSM_CAMERA_I2C_BYTE_DATA,
.delay = 0,
,
;
// ……
static struct msm_camera_csi2_params *csi_params[] =
&ov5648_oty5f03_csi_params,
&ov5648_oty5f03_csi_params,
;
// ……
static struct sensor_crop_parms_t crop_params[] =
0, 0, 0, 0,
0, 0, 0, 0,
;
// ……
static struct sensor_lib_out_info_t sensor_out_info[] =
.x_output = 2592,
.y_output = 1944,
.line_length_pclk = 2816,
.frame_length_lines = 2380,
.vt_pixel_clk = 84000000,
.op_pixel_clk = 84000000,
.binning_factor = 1,
.max_fps = 12.5,
.min_fps = 7.5,
.mode = SENSOR_DEFAULT_MODE,
,
.x_output = 1296,
.y_output = 972,
.line_length_pclk = 1408,
.frame_length_lines = 992,
.vt_pixel_clk = 42000000,
.op_pixel_clk = 42000000,
.binning_factor = 1,
.max_fps = 30.0,
.min_fps = 7.5,
.mode = SENSOR_DEFAULT_MODE,
,
;
// ……
static struct sensor_lib_chromatix_t ov5648_oty5f03_chromatix[] =
.common_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(common),
.camera_preview_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(snapshot),
.camera_snapshot_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(snapshot),
.camcorder_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(default_video),
,
.common_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(common),
.camera_preview_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(preview),
.camera_snapshot_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(preview),
.camcorder_chromatix = OV5648_OTY5F03_LOAD_CHROMATIX(default_video),
,
;
镜头信息移植
相机处理流程(比如曝光计算)需要镜头信息。因此,以下结构需添加正确的镜头信息。
static sensor_lens_info_t default_lens_info =
.focal_length = 2.37,
.pix_size = 1.4,
.f_number = 2.4,
.total_f_dist = 1.97,
.hor_view_angle = 70.24,
.ver_view_angle = 52.68,
;
曝光配置移植
通常情况下,不同传感器有不同的曝光控制方式。所以,当传感器打开后,需移植曝光配置以成功调试传感器的曝光控制。
包括以下函数:
-
ov5648_real_to_register_gain – 将实际逻辑增益转换为寄存器值。
-
ov5648_register_to_real_gain – 将寄存器值转换成真实的逻辑增益。
-
ov5648_calculate_exposure – 获取曝光时间和增益的另一个曝光配置.
-
ov5648_fill_exposure_array – 准备另一个曝光配置数组。
添加Chromatix文件
代码路径:vendor/qcom/proprietary/mm-camera/mm-camera2media-controller/modules/sensor/schro/matix1/libchromatix
文件夹名:chromatix_ov5648_oty5f03
需添加的代码:该部分主要是针对raw格式是摄像头,而yuv格式的摄像头不需要做该步骤,而这添加的内容主要是raw摄像头效果参数的.h文件,这需要向模组或IC厂索要该部分的文件。
如果说我的文章对你有用,只不过是我站在巨人的肩膀上再继续努力罢了。
若在页首无特别声明,本篇文章由 Schips 经过整理后发布。
博客地址:https://www.cnblogs.com/schips/
以上是关于高通Cam-X平台 Camera移植的主要内容,如果未能解决你的问题,请参考以下文章