11_GPIO中断
Posted 韦东山
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了11_GPIO中断相关的知识,希望对你有一定的参考价值。
第十一章 GPIO中断
1.1 GPIO中断介绍(通用的概念)
假设你现在正在写作业,突然电话响起,你需要停下写作业接电话,挂电话后继续写作业。突然由人按门铃,你需要先去开门,然后继续回来写作业。电话和门铃打断了写作业,能中断写作业的事情有很多,比如身体不舒服,口渴等。被打断后怎么做?身体不舒服就停下写作业休息一会,身体好了继续写作业。口渴就停下写作业喝水,喝完水继续写作业。如果你正在接一个很重要的电话,突然门铃响了,这是会优先处理其中一件事,比如先让按门铃的人等一下,挂电话后再去开门,或者先挂电话,等开门后再打电话过去。这就存在一个中断优先级的问题。
当有事件产生,处理事件之前我们需要记住现在作业写到第几页了,或者在作业上记一个标记,然后取处理事件,电话铃响了需要到放电话的地方去,门铃响了需要到门口去,口渴需要到放饮水机地方去,也就是说,不同的突发事件需要到不同的地方去处理。
嵌入式系统中也有类似的情况。CPU在运行过程中,也会被各种异常打断。这些异常有
① 指令未定义
② 指令、数据访问有问题
③ SWI(软中断)
④ 快中断
⑤ 中断
中断也属于一种异常,导致中断发生的中断源有很多,比如:
① 按键
② 定时器
③ ADC转换完成
④ UART发生完数据、接收数据
⑤ 等等
这些众多的中断源,汇集中中断管理器,由中断管理器选择优先级最高的中断并通知CPU。CPU会根据中断的类型到跳转到不同的地址处理中断。发生中断后,CPU并不是随便跳到一个地址处理中断,而是根据异常向量表,跳转到对应的地址处理中断。
1.2.1 GPIO中断
GPIO中断,指有GPIO模块产生的中断,有边沿触发中断或者电平翻转中断。GPIO模块能检测到引脚上的值是0还是1,并能通过外部拓展将电平从变为1或是从1变到0。CPU接收外部的中断请求,并进行处理,其实是一个被动接受的过程,这样的好处是己能保证主任务的执行效率,又能及时获取外部请求,从而处理重要的设备请求中断。
当GPIO模块检测到管脚电平变化且满足中断触发条件,就会触发中断,CPU会跳转到中断处理地址进行中断处理,为了避免破坏主任务数据,CPU会处理保存当前相关寄存器(保存现场)并进入中断服务函数,执行完中断服务函数后,CPU会恢复相关寄存器(恢复现场),回到主任务继续执行程序。
程序发生GPIO中断后会根据异常向量表强制跳转到0x18(IRQ中断地址)。如下图:
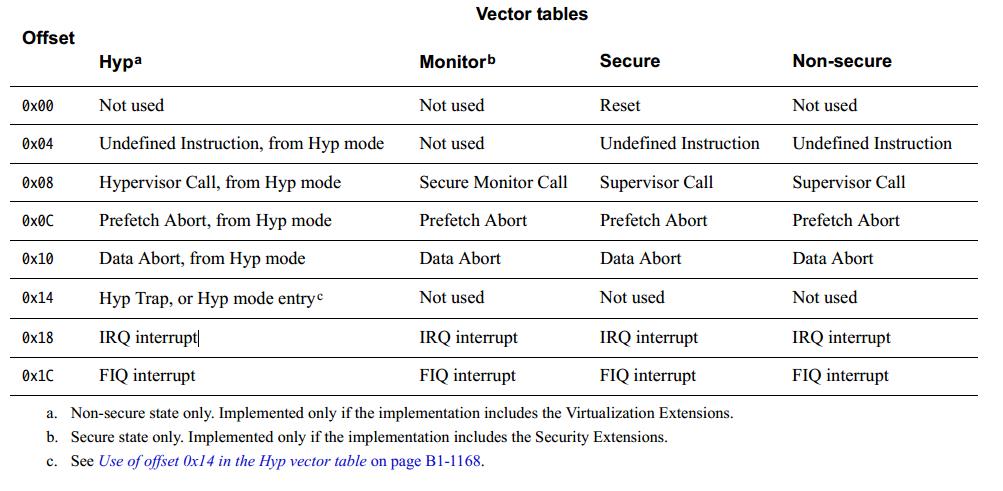
异常向量表并不总是从0地址开始,IMX6ULL可以设置vector base寄存器,指定向量表在其他位置,比如设置 vector base 为 0x80000000,指定为 DDR 的某个地
址。但是表中的各个异常向量的偏移地址,是固定的:复位向量偏移地址是 0,中断是 0x18。
本次实验使用GPIO中断方式实现按键控制LED亮灭,并通过串口把中断ID打印出来。
中断控制器和CP15协处理器
操作系统中,中断系统是很重要的一部分。有了中断系统,才不用一直轮询是否有事件发生,系统效率得以提高。中断系统一般分为三个部分:模块、中断管理器和处理器。模块通常有寄存器设置是否使能中断和中断触发方式。中断控制器可以管理中断优先级等。处理器则设置寄存器响应中断。
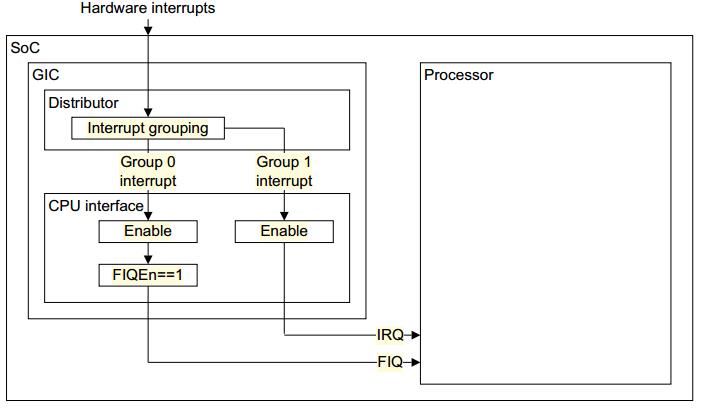
如上图所示,硬件中断信号发送GIC(Generic Interrupt Controller),GIC产生一个FIQ或IRQ信号给CPU。GPIO模块、UART模块均能产生硬件中断。在初始化中断时,要初始化GIC中断控制器,如果时GPIO中断则还要设置GPIO模块内相关的寄存器,如果时串口中断则还要设置UART模块内相关的寄存器。
1.2 GIC中断控制器介绍
1.2.1 IMX6ULL GIC中断控制器
IMX6ULL是Cortex-A7内核,采用GIC V2(Generic Interrupt Controller)中断控制器。在这里只简单的介绍一下GIC,具体可以参考arm文档。
GIC的主要作用可以归结为接受硬件中断信号,并进行简单的处理,按照一定的设置策略,分给对应的CPU处理。如下图:
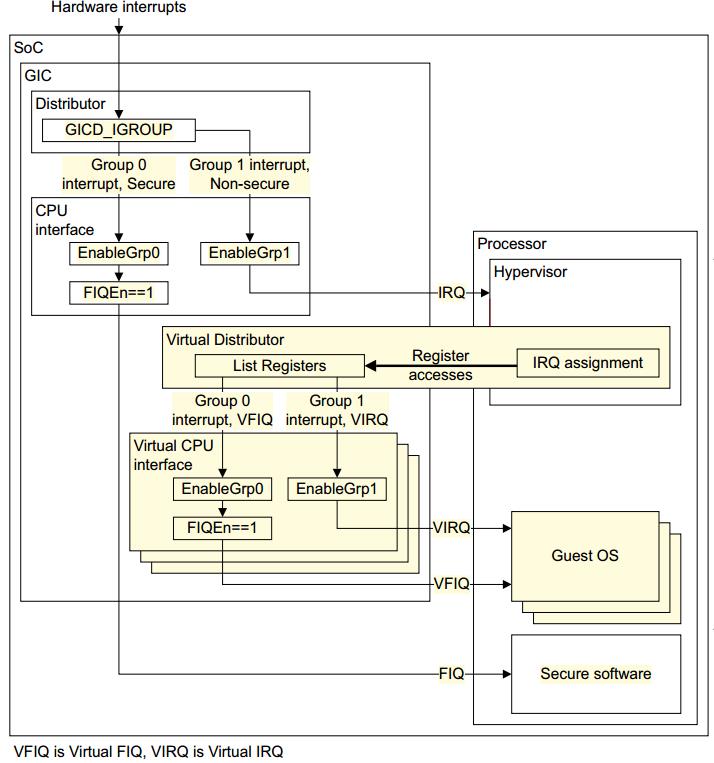
ARM内核只提供了四个信号给GIC汇报中断情况:VIRQ(虚拟快速IRQ)、VFIQ(虚拟快速FIQ)、IRQ、FIQ。VIRQ、VFIQ是针对虚拟化,剩下就是IRQ和FIQ。GPIO中断属于IRQ中断,所以在本次实验中GIC上报IRQ信号给ARM内核。
接下来看一下GIC内部过程,如下图:

中断源分为SPI(Shared Peripheral Interrupt)、PPI(Private Peripheral Interrupt)、SGI request(Software-generated Interrupt)。外部中断都属于SPI中断源。
GIC控制器包括分发器(Distributor)和CPU接口端(CPU interface)。
分发器(Distributor)主要完成对整个中断控制器使能,设置中断优先级,设置中断触发方式,决定每个中断信号发送到哪一个具体的CPU上执行。
CPU接口端(CPU interface)主要完成使能和发送一个具体的中断信号到特定的CPU上,确认中断已被CPU接受、处理以及处理完成,设置CPU能接受中断的优先级以及基于级别的中断抢占。
中断信号先到分发器,根据设定CPU,发送到CPU对应的interface上,在这里判断是否优先级足够高,能否抢断或打断当前的终端处理,如果可以,CPU interface就会发送一个物理的signa到CPU的IRQ线上,CPU接收到中断信号,转到中断处理模式进行处理。
1.2.2 IMX6ULL GIC中断寄存器
GIC寄存器分为Distributor register和CPU interface register。寄存器数目较多,这里介绍本次实验中需要我们设置的寄存器。
1.2.2.1 GICC_IAR寄存器


GICC_IAR寄存器属于CPU interface register,作用是:保存中断ID,读取GICC_IAR寄存器可以获得中断ID,这个过程可以当作对中断的确认。
1.2.2.2 GICC_EOIR寄存器


GICC_EOIR寄存器属于CPU interface register,作用是:中断完成时,向GICC_EOIR写入中断ID,表示IRQ处理结束。
1.2.3 CP15协处理器
1.2.3.1 CP15协处理器介绍
在基于ARM的嵌入式系统中,存储系统通常是系统控制协处理器CP15完成的。ARM处理器使用协处理器指令MCR和MRC来读写寄存器,控制cache、MMU、配置时钟(在bootloader时钟初始化时会用到)等。CP15包含16个32位寄存器,编号为0~15。
在本次实验中,需要设置的寄存器有:SCTLR(System Control Register)寄存器,VBAR(Vector Base Address)寄存器。
1.2.3.2 SCTLR(System Control Register)寄存器
设置SCTLR寄存器可以控制cache、MMU等。
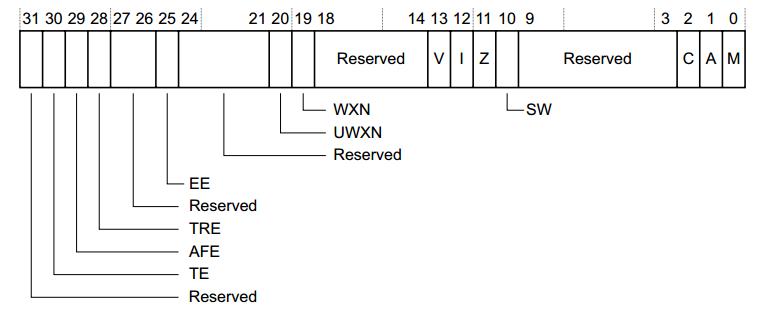


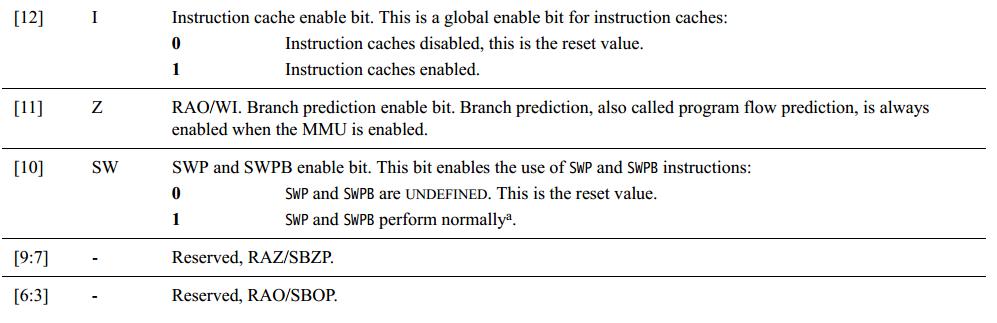

Bit[13]: 异常向量表地址设置位。我们设置为0,默认0x00000000地址,可以通过设置vector base寄存器映射到设置地址。
Bit[12]、Bit[2]: 指令cache、数据cache使能位。刚上电时,CPU还不能管理cache,指令cache可关闭也可不关闭,但数据cache一定要关闭,否争可能导致刚开始的代码里,去读取数据时到cache里读取,而这时候RAM数据还没有cache过来,导致数据预取错误。
Bit[11]: 分支预测使能位。分支预测技术是用来提高执行流水线指令效率。在本次实验中关闭分支预测技术。
Bit[1]: 字节对齐设置位。打开字节对齐,可以提高CPU访问效率,但会损失一部分内存空间。在本次实验中 CPU并不会做太多复杂的工作,所以关闭字节对齐。
Bit[0]: MMU使能位。上电后系统没有配置MMU,所以要先关掉MMU。
MRC p15, 0, < Rt >, c1, c0, 0: 把SCTLR寄存器的值读到ARM寄存器Rt中。
MRC p15, 0, < Rt >, c1, c0, 0: 把ARM寄存器Rt的值写入SCTLR寄存器。
1.2.3.3 VBAR(Vector Base Address)寄存器
设置VBAR寄存器,可以设置异常向量表的映射地址。如果不把异常向量表的映射地址告诉CPU,在发生异常时,CPU就找不到异常向量表,就无法处理异常。


MRC p15, 0, < Rt >, c12, c0, 0: 把VBAR寄存器的值读到ARM寄存器Rt中。
MRC p15, 0, < Rt >, c12, c0, 0: 把ARM寄存器Rt的值写入VBAR寄存器。
1.3 IMX6ULL的GPIO中断寄存器介绍
1.3.1 GPIO interrupt configuration register1 (GPIOx_ICR1)
GPIO中断配置寄存器1
ICRn[1:0]决定中断类型:
00 低电平触发
01 高电平触发
10 上升沿触发
11 下降沿触发
ICR0~ICR15对应GPIO interrupt 0-15
1.3.2 GPIO interrupt configuration register2 (GPIOx_ICR2)
GPIO中断配置寄存器2

与GPIOx_ICR1类似
ICR0~ICR15对应GPIO interrupt 16-31
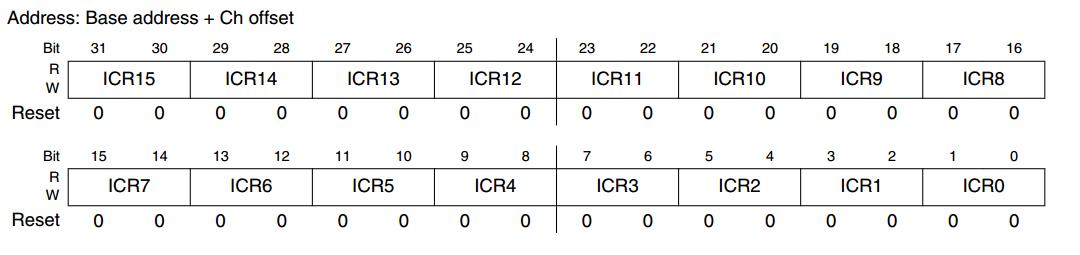
1.3.3 GPIO interrupt mask register (GPIOx_IMR)
GPIO中断屏蔽寄存器
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qzczoE5q-1642060200367)(https://cdn.jsdelivr.net/gh/DongshanPI/HomeSite-Photos@main/IMX6ULL-BareMetal/11_GPIO_interrupt_image_018.png)]
Bit[n]对应interrupt n
0 interrupt n屏蔽
1 interrupt n 打开
1.3.4 GPIO interrupt status register (GPIOx_ISR)
GPIO中断状态寄存器

中断状态位-当在GPIO输入上检测到有效状态(由相应的ICR位确定)时,该寄存器的位n置为有效(高电平有效)。该寄存器的值与GPIO_IMR中的值无关。
当检测到活动状态时,相应的位将保持置位状态,直到被软件清除为止。通过将1写入相应的位位置来清除状态标志。
1.3.5 GPIO edge select register (GPIOx_EDGE_SEL)
GPIO中断边沿选择寄存器

设置GPIO_EDGE_SEL [n]时,GPIO会忽略ICR [n]设置,同时检测对应输入信号的上升沿和下降沿。
1.4 按键中断程序编程示例一
1.4.1 管脚设置和查询中断号

从上面的电路图可见KEY1接在GPIO5_1(SNVS_TAMPER1 pad,ALT5)上,KEY4接在GPIO4_14(NAND_CE1_B pad,ALT5)上。使用IOMUXC_SetPinMux设置这两个引脚为GPIO模式。如何获取这两个GPIO的中断号呢?查阅数据手册的chapter3,CORTEX A7interrupts章节,这两个GPIO的中断号如下表所示。对应到GIC的SPI中断号需要在此编号基础上加上32,所以KEY1对应的GIC interrupt ID为(74 + 32 = 106),KEY2对应的GIC interrupt ID为(72 + 32 = 104)。

1.4.2 GIC控制器基地址的获取方法
直接查数据手册 Table 2-1. System memory map

可以知道gic的基地址是0xA0000
对于gic控制器还有另一种方法,通过 CP15查询:
mrc p15, 4, r0, c15, c0, 0
将gic的基地址通过mrc指令读取到r0寄存器。
1.4.3 GIC的初始化
通过CP15获取GIC的基地址,读取GICD_TYPER寄存器获得中断的数目,往GICD_ ICENABLERn寄存器写入0xFFFFFFFF禁用所有的SGI,PPI和SPI。通过GICC_PMR设置优先级等级,设置为0xF8;将GICC_BPR设置为2,这允许各个优先级进行抢占。 最后使能group0的distributor和CPU interface。
代码在**裸机Git仓库 NoosProgramProject/(11_GPIO中断/008_exception/gic.c)**目录内:
void gic_init(void)
u32 i, irq_num;
GIC_Type *gic = get_gic_base();
/* the maximum number of interrupt IDs that the GIC supports */
irq_num = (gic->D_TYPER & 0x1F) + 1;
/* On POR, all SPI is in group 0, level-sensitive and using 1-N model */
/* Disable all PPI, SGI and SPI */
for (i = 0; i < irq_num; i++)
gic->D_ICENABLER[i] = 0xFFFFFFFFUL;
/* The priority mask level for the CPU interface. If the priority of an
* interrupt is higher than the value indicated by this field,
* the interface signals the interrupt to the processor.
*/
gic->C_PMR = (0xFFUL << (8 - 5)) & 0xFFUL;
/* No subpriority, all priority level allows preemption */
gic->C_BPR = 7 - 5;
/* Enables the forwarding of pending interrupts from the Distributor to the CPU interfaces.
* Enable group0 distribution
*/
gic->D_CTLR = 1UL;
/* Enables the signaling of interrupts by the CPU interface to the connected processor
* Enable group0 signaling
*/
gic->C_CTLR = 1UL;
1.4.4 中断异常处理汇编部分
在异常向量表偏移为0x18的地方将pc设置为IRQ_Handler标号的位置,跳转到IRQ_Handler标号位置执行,处理器处于中断模式,lr_irq保存了被中断模式中的下一条即将执行的指令的地址,将lr减去4,将r0-r12和lr保存在栈上,用bl指令调用C函数handle_irq_c,C函数返回来后将r0-r12从栈上弹出,栈上的lr弹出到PC,并将SPSR拷贝到CPSR,返回被打断的指令继续执行。在reset handler里需要设置好irq模式的栈,这样在中断模式里才可以调用C函数,同时调用cpsie i打开中断。使用如下两条指令设置异常向量的基地址
ldr r0, =_vector_table
mcr p15, 0, r0, c12, c0, 0 /* set VBAR, Vector Base Address Register*/
汇编部分代码如下所示代码如下**裸机Git仓库 NoosProgramProject/(11_GPIO中断/008_exception/**008_exception\\start.S)文件:
.text
.global _start, _vector_table
_start:
_vector_table:
ldr pc, =Reset_Handler /* Reset */
ldr pc, =Undefined_Handler /* Undefined instructions */
ldr pc, =SVC_Handler /* Supervisor Call */
b halt//ldr pc, =PrefAbort_Handler /* Prefetch abort */
b halt//ldr pc, =DataAbort_Handler /* Data abort */
.word 0 /* RESERVED */
ldr pc, =IRQ_Handler /* IRQ interrupt */
b halt//ldr pc, =FIQ_Handler /* FIQ interrupt */
………
.align 2
IRQ_Handler:
/* 执行到这里之前:
* 1. lr_irq保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_irq保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10010, 进入到irq模式
* 4. 跳到0x18的地方执行程序
*/
/* 保存现场 */
/* 在irq异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr-4是异常处理完后的返回地址, 也要保存 */
sub lr, lr, #4
stmdb sp!, r0-r12, lr
/* 处理irq异常 */
bl handle_irq_c
/* 恢复现场 */
ldmia sp!, r0-r12, pc^ /* ^会把spsr_irq的值恢复到cpsr里 */
.align 2
Reset_Handler:
/* Reset SCTlr Settings */
mrc p15, 0, r0, c1, c0, 0 /* read SCTRL, Read CP15 System Control register */
bic r0, r0, #(0x1 << 13) /* Clear V bit 13 to use normal exception vectors */
bic r0, r0, #(0x1 << 12) /* Clear I bit 12 to disable I Cache */
bic r0, r0, #(0x1 << 2) /* Clear C bit 2 to disable D Cache */
bic r0, r0, #(0x1 << 2) /* Clear A bit 1 to disable strict alignment */
bic r0, r0, #(0x1 << 11) /* Clear Z bit 11 to disable branch prediction */
bic r0, r0, #0x1 /* Clear M bit 0 to disable MMU */
mcr p15, 0, r0, c1, c0, 0 /* write SCTRL, Write to CP15 System Control register */
cps #0x1B /* Enter undef mode */
ldr sp, =0x80300000 /* Set up undef mode stack */
cps #0x12 /* Enter irq mode */
ldr sp, =0x80400000 /* Set up irq mode stack */
cps #0x13 /* Enter Supervisor mode */
ldr sp, =0x80200000 /* Set up Supervisor Mode stack */
ldr r0, =_vector_table
mcr p15, 0, r0, c12, c0, 0 /* set VBAR, Vector Base Address Register*/
//mrc p15, 0, r0, c12, c0, 0 //read VBAR
bl clean_bss
bl system_init
cpsie i /* Unmask interrupts */
bl main
halt:
b halt
clean_bss:
/* 清除BSS段 */
ldr r1, =__bss_start
ldr r2, =__bss_end
mov r3, #0
clean:
cmp r1, r2
strlt r3, [r1]
add r1, r1, #4
blt clean
mov pc, lr
1.4.5 中断异常处理C函数部分
获取到gic的基地址后,读取GICC_IAR获得中断号,根据中断号调用对应中断号的irq_handler函数,该函数是用户通过request_irq注册的中断处理函数,然后往GICC_EOIR写入中断号清除掉中断。
代码在裸机Git仓库 NoosProgramProject/(11_GPIO中断/008_exception\\gic.c):
void handle_irq_c(void)
int nr;
GIC_Type *gic = get_gic_base();
/* The processor reads GICC_IAR to obtain the interrupt ID of the
* signaled interrupt. This read acts as an acknowledge for the interrupt
*/
nr = gic-> C_IAR;
printf("irq %d is happened\\r\\n", nr);
irq_table[nr].irq_handler(nr, irq_table[nr].param);
/* write GICC_EOIR inform the CPU interface that it has completed
* the processing of the specified interrupt
*/
gic->C_EOIR = nr;
1.4.6 GPIO中断初始化和安装中断处理程序
对于KEY1,将GPIO5_01通过EDGE_SEL设置成双边沿触发,通过IMR对应位设置为1打开中断,为了防止误触发将ISR对应位写1清除掉中断。然后调用request_irq注册对应中断的中断处理函数,对于GPIO5_01是key_gpio5_handle_irq,中断处理函数里根据按键按下和松开分别在串口打印,并且按下时绿灯点亮,松开时绿灯熄灭,并且往ISR对应位写1清掉中断,否则会一直触发中断。对于KEY2,和KEY1类似,按下和松开只会在串口进行打印。
代码在裸机Git仓库 NoosProgramProject/(11_GPIO中断/008_exception\\main.c):
void key_gpio5_handle_irq(void)
/* read GPIO5_DR to get GPIO5_IO01 status*/
if((GPIO5->DR >> 1 ) & 0x1)
printf("key 1 is release\\r\\n");
/* led off, set GPIO5_DR to configure GPIO5_IO03 output 1 */
GPIO5->DR |= (1<<3); //led on
else
printf("key 1 is press\\r\\n");
/* led on, set GPIO5_DR to configure GPIO5_IO03 output 0 */
GPIO5->DR &= ~(1<<3); //led off
/* write 1 to clear GPIO5_IO03 interrput status*/
GPIO5->ISR |= (1 << 1);
void key_gpio4_handle_irq(void)
/* read GPIO4_DR to get GPIO4_IO014 status*/
if((GPIO4->DR >> 14 ) & 0x1)
printf("key 2 is release\\r\\n");
else
printf("key 2 is press\\r\\n");
/* write 1 to clear GPIO4_IO014 interrput status*/
GPIO4->ISR |= (1 << 14);
void key_irq_init(void)
/* if set detects any edge on the corresponding input signal*/
GPIO5->EDGE_SEL |= (1 << 1);
/* if set 1, unmasked, Interrupt n is enabled */
GPIO5->IMR |= (1 << 1);
/* clear interrupt first to avoid unexpected event */
GPIO5->ISR |= (1 << 1);
GPIO4->EDGE_SEL |= (1 << 14);
GPIO4->IMR |= (1 << 14);
GPIO4->ISR |= (1 << 14);
request_irq(GPIO5_Combined_0_15_IRQn, (irq_handler_t)key_gpio5_handle_irq, NULL);
request_irq(GPIO4_Combined_0_15_IRQn, (irq_handler_t)key_gpio4_handle_irq, NULL);
1.4.7 特定中断号的中断使能和禁止
以中断号调用gic_enable_irq,对应的中断在GIC中打开,通过往GICD_ISENABLERn对应的位写入1打开。以中断号调用gic_ disable _irq,对应的中断在GIC中关闭,通过往GICD_ICENABLERn对应的位写入1关闭。
代码裸机Git仓库 NoosProgramProject/(11_GPIO中断/008_exception/gic.c):
void gic_enable_irq(IRQn_Type nr)
GIC_Type *gic = get_gic_base();
/* The GICD_ISENABLERs provide a Set-enable bit for each interrupt supported by the GIC.
* Writing 1 to a Set-enable bit enables forwarding of the corresponding interrupt from the
* Distributor to the CPU interfaces. Reading a bit identifies whether the interrupt is enabled.
*/
gic->D_ISENABLER[nr >> 5] = (uint32_t)(1UL << (nr & 0x1FUL));
void gic_disable_irq(IRQn_Type nr)
GIC_Type *gic = get_gic_base();
/* The GICD_ICENABLERs provide a Clear-enable bit for each interrupt supported by the
* GIC. Writing 1 to a Clear-enable bit disables forwarding of the corresponding interrupt from
* the Distributor to the CPU interfaces. Reading a bit identifies whether the interrupt is enabled.
*/
gic->D_ICENABLER[nr >> 5] = (uint32_t)(1UL << (nr & 0x1FUL));
1.4.8 主函数调用
调用system_init_irq_table初始化中断跳转表,key_irq_init初始化按键中断的GPIO配置和注册中断处理函数,通过gic_init初始化GIC控制器,最后通过gic_enable_irq使能按键对应GIC中断号使用的中断。
代码裸机Git仓库 NoosProgramProject/(11_GPIO中断/008_exception/main.c):
void system_init()
init_pins();
led_gpio_init();
led_ctl(0);//turn off led
boot_clk_gate_init();
boot_clk_init();
uart1_init();
puts("hello world\\r\\n");
system_init_irq_table();
key_irq_init();
gic_init();
gic_enable_irq(GPIO5_Combined_0_15_IRQn);
gic_enable_irq(GPIO4_Combined_0_15_IRQn);
1.4.9 参考章节《4-1.4编译程序》编译程序
进入 **裸机Git仓库 NoosProgramProject/(11_GPIO中断/008_exception)**源码目录
1.4.10 参考章节《4-1.4映像文件烧写、运行》烧写、运行程序
此时观察串口打印
按下KEY1,绿灯点亮,松开,绿灯熄灭,同时串口会打印按下松开的信息。按下或者松开KEY2,串口会打印出KEY2按下松开的信息。串口打印如下所示:

1.5 按键中断编程示例二
1.5.1 按键中断程序编程
此节代码在**裸机Git仓库 NoosProgramProject/(11_GPIO中断/011_gpio_eint)**目录内。
1.5.1.1 编写start.S
1.编写异常向量表
.text
.global _start, _vector_table
_start:
_vector_table:
ldr pc, =Reset_Handler
/* Reset */
b halt
/* Undefined instructions */
b halt
/* Supervisor Call */
b halt
/* Prefetch abort */
b halt
/* Data abort */
.word 0
/* RESERVED */
ldr pc, =IRQ_Handler
/* IRQ interrupt */
b halt
/* FIQ interrupt */
.align 2
IRQ_Handler:
b halt
.align 2
Reset_Handler:
b halt
halt:
b halt
上电后,程序从_start地址开始执行,05行代码对应的是0x00地址,06行代码对应的是0x4,依次类推,11行代码对应的是0x18,与11.1.2章节介绍的异常向量表对应。在编程时,通常在异常向量表中放一条跳转指令,跳转去执行更复杂的操作。比如在IRQ_Handler函数中需要保存现场,等处理完异常后又需要恢复现场。
程序在0x00地址通过ldr指令把Reset Handler的地址赋给pc,CPU跳转到Reset Handler运行,发生中断时,CPU跳转到IRQ_Handler运行。
2.编写复位中断函数
Reset_Handler:
/* Reset SCTlr Settings */
mrc p15, 0, r0, c1, c0, 0 /* read SCTRL, Read CP15 System Control register */
bic r0, r0, #(0x1 << 13) /* Clear V bit 13 to use normal exception vectors */
bic r0, r0, #(0x1 << 12) /* Clear I bit 12 to disable I Cache */
bic r0, r0, #(0x1 << 2) /* Clear C bit 2 to disable D Cache */
bic r0, r0, #(0x1 << 1) /* Clear A bit 1 to disable strict alignment */
bic r0, r0, #(0x1 << 11) /* Clear Z bit 11 to disable branch prediction */
bic r0, r0, #0x1 /* Clear M bit 0 to disable MMU */
mcr p15, 0, r0, c1, c0, 0 /* write SCTRL, Write to CP15 System Control register */
cps #0x1B /* Enter undef mode */
ldr sp, =0x80300000 /* Set up undef mode stack */
cps #0x12 /* Enter irq mode */
ldr sp, =0x80400000 /* Set up irq mode stack */
cps #0x13 /* Enter Supervisor mode */
ldr sp, =0x80200000 /* Set up Supervisor Mode stack */
ldr r0, =_vector_table
mcr p15, 0, r0, c12, c0, 0 /* set VBAR, Vector Base Address Register*/
//mrc p15, 0, r0, c12, c0, 0 //read VBAR
bl clean_bss
bl system_init
cpsie i /* Unmask interrupts */
bl main
halt:
b halt
clean_bss:
/* 清除BSS段 */
ldr r1, =__bss_start
ldr r2, =__bss_end
mov r3, #0
clean:
cmp r1, r2
strlt r3, [r1]
add r1, r1, #4
blt clean
mov pc, lr
在Reset_Handler中,需要完成关闭Icache、Dcache、MMU等操作。通过CPS指令改变处理器状态,比如cps #0x1B进入undef mode,然后设置undef mode状态下的栈地址。CPS #0x12进入irq mode,设置irq mode状态下的栈地址。CPS #0x13进入Supervisor mode,设置Supervisor mode状态下的栈地址。设置不同模式下栈地址的目的是在调用C函数时,总有一些寄存器的值需要保存下来,如果直接跳转到子函数里去执行,很有可能就被破坏,因为子函数可能也会用到这些寄存器。
3.编写IRQ服务函数
IRQ_Handler:
/* 执行到这里之前:
* 1. lr_irq保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_irq保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为10010, 进入到irq模式
* 4. 跳到0x18的地方执行程序 */
/* 保存现场 */
/* 在irq异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr-4是异常处理完后的返回地址, 也要保存 */
sub lr, lr, #4
stmdb sp!, r0-r12, lr
/* 处理irq异常 */
bl handle_irq_c
/* 恢复现场 */
ldmia sp!, r0-r12, pc^ /* ^会把spsr_irq的值恢复到cpsr里 */
在IRQ_Handler中,需要保存现场,因为在handle_irq_c函数中可能会有修改r0-r12寄存器。等异常处理完后,再恢复现场。保存现场、恢复现场都离不开栈,保存现场需要把寄存器的值一个个放入栈中,恢复现场则从栈中一个个读取寄存器的值。所以再Reset_Handler中提前设置IRQ mode下的栈地址,当然,在IRQ_Handler中在设置栈也可以,看个人习惯吧。
1.5.1.2 编写interrupt.c
1.初始化GIC、使能中断并设置中断触发方式
void key_exit_init(void)
GPIO5_IMR = (volatile unsigned int *)(0x20AC014);
GPIO5_EDGE_SEL = (volatile unsigned int *)(0x20AC01C);
GPIO5_ISR = (volatile unsigned int *)(0x20AC018);
GPIO5_DR = (volatile unsigned int *)(0x20AC000);
GPIO4_IMR = (volatile unsigned int *)(0x20A8014);
GPIO4_EDGE_SEL = (volatile unsigned int *)(0x20A801C);
GPIO4_ISR = (volatile unsigned int *)(0x20A8018);
GPIO4_DR = (volatile unsigned int *)(0x20A8000);
gic_init();
gic_enable_irq(GPIO5_Combined_0_15_IRQn);
gic_enable_irq(GPIO4_Combined_0_15_IRQn);
/* 设置GPIOx_EDGE_SEL寄存器
* GPIO_EDGE_SEL bit is set, then a rising edge or falling edge in the corresponding
* signal generates an interrupt.
* GPIO5_EDGE_SEL 0x20AC01C
* bit[1] = 0b1
* GPIO4_EDGE_SEL 0x20A801C
* bit[14] = 0b1
*/
*GPIO5_EDGE_SEL |= (1<<1);
*GPIO4_EDGE_SEL |= (1<<14);
/* 设置GPIOx_IMR寄存器
* GPIO_IMR contains masking bits for each interrupt line.
* GPIO5_IMR 0x20AC014
* bit[1] = 0b1
* GPIO4_IMR 0x20A8014
* bit[14] = 0b1
*/
*GPIO5_IMR |= (1<<1);
*GPIO4_IMR |= (1<<14);
在key_exit_init函数中,首先调用gic_init
以上是关于11_GPIO中断的主要内容,如果未能解决你的问题,请参考以下文章