《ROS机器人程序设计》期中测评试卷 (ROS2)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《ROS机器人程序设计》期中测评试卷 (ROS2)相关的知识,希望对你有一定的参考价值。
课程以ROS2-F/G版讲解为主。
文字版:
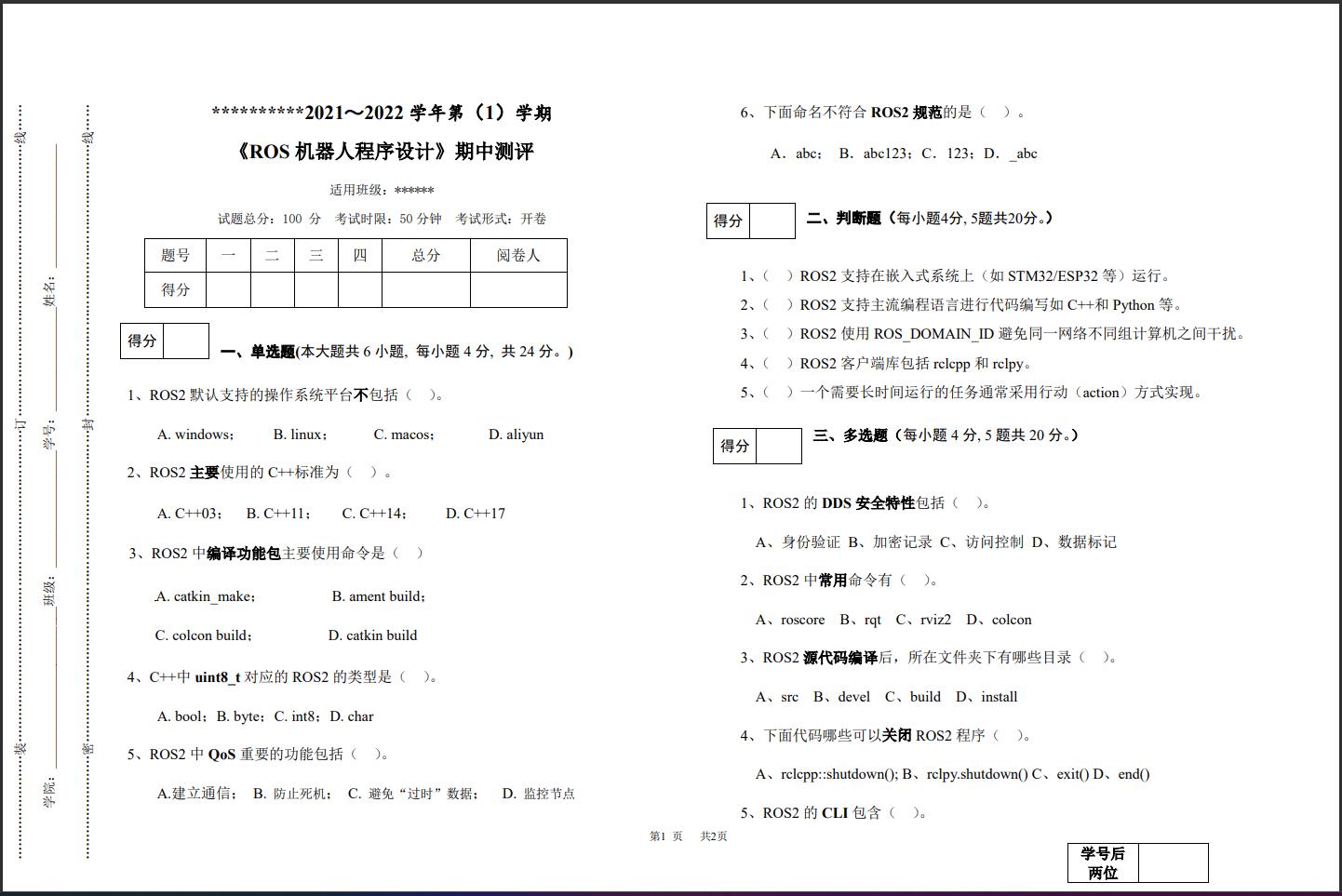
一、单选题(本大题共6小题, 每小题4分, 共24分。)
1、ROS2默认支持的操作系统平台不包括( )。
A. windows; B. linux; C. macos; D. aliyun
2、ROS2主要使用的C++标准为( )。
A. C++03; B. C++11; C. C++14; D. C++17
3、ROS2中编译功能包主要使用命令是( )
A. catkin_make; B. ament build;
C. colcon build; D. catkin build
4、C++中uint8_t对应的ROS2的类型是( )。
A. bool;B. byte;C. int8;D. char
5、ROS2中QoS重要的功能包括( )。
A.建立通信; B. 防止死机; C. 避免“过时”数据; D. 监控节点
6、下面命名不符合ROS2规范的是( )。
A.abc; B.abc123;C.123;D._abc
二、判断题(每小题4分, 5题共20分。)
1、( )ROS2支持在嵌入式系统上(如STM32/ESP32等)运行。
2、( )ROS2支持主流编程语言进行代码编写如C++和Python等。
3、( )ROS2使用ROS_DOMAIN_ID避免同一网络不同组计算机之间干扰。
4、( )ROS2客户端库包括rclcpp和rclpy。
5、( )一个需要长时间运行的任务通常采用行动(action)方式实现。
三、多选题(每小题4分, 5题共20分。)
1、ROS2的DDS安全特性包括( )。
A、身份验证 B、加密记录 C、访问控制 D、数据标记
2、ROS2中常用命令有( )。
A、roscore B、rqt C、rviz2 D、colcon
3、ROS2源代码编译后,所在文件夹下有哪些目录( )。
A、src B、devel C、build D、install
4、下面代码哪些可以关闭ROS2程序( )。
A、rclcpp::shutdown(); B、rclpy.shutdown() C、exit() D、end()
5、ROS2的CLI包含( )。
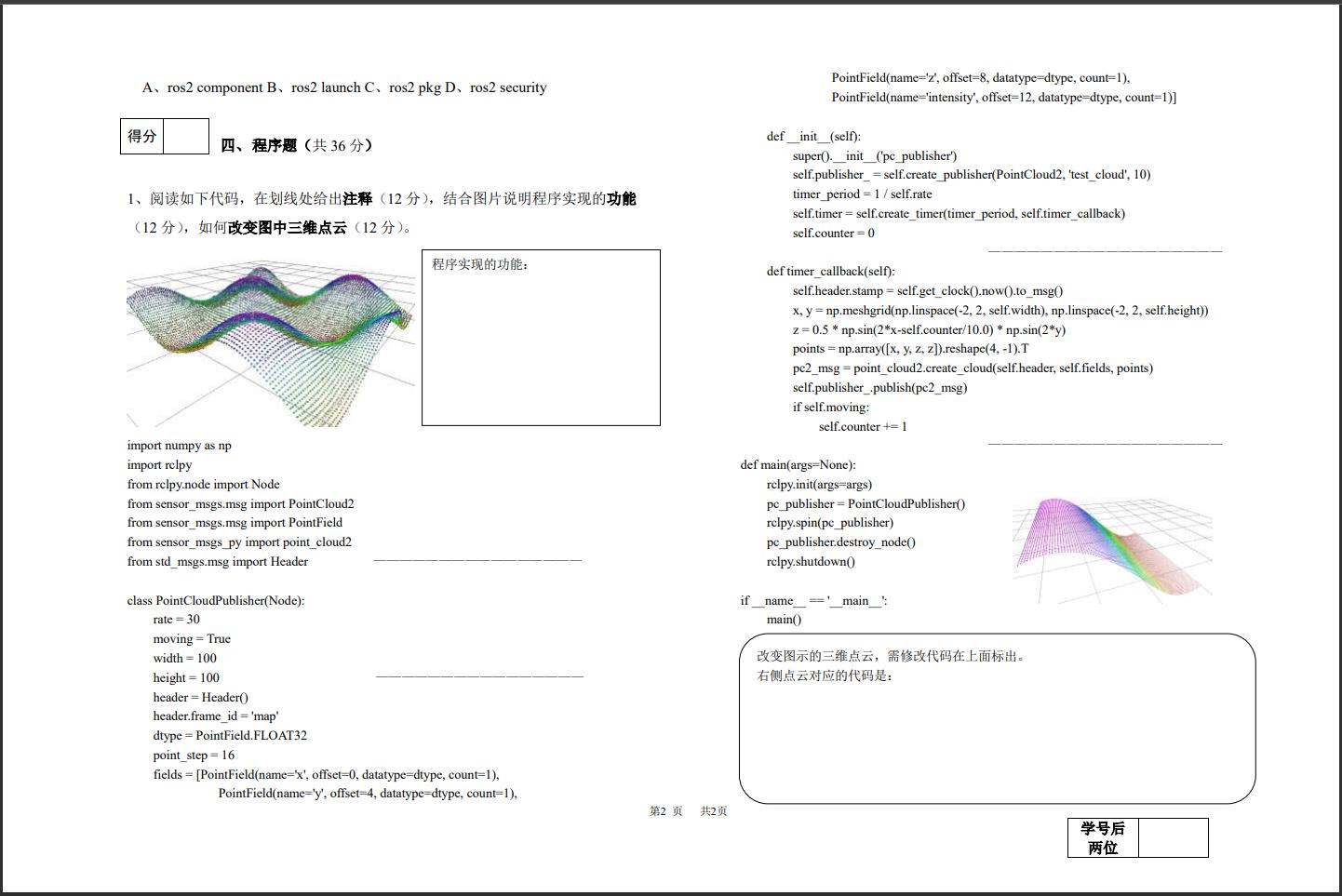
A、ros2 component B、ros2 launch C、ros2 pkg D、ros2 security
程序题(共36分)
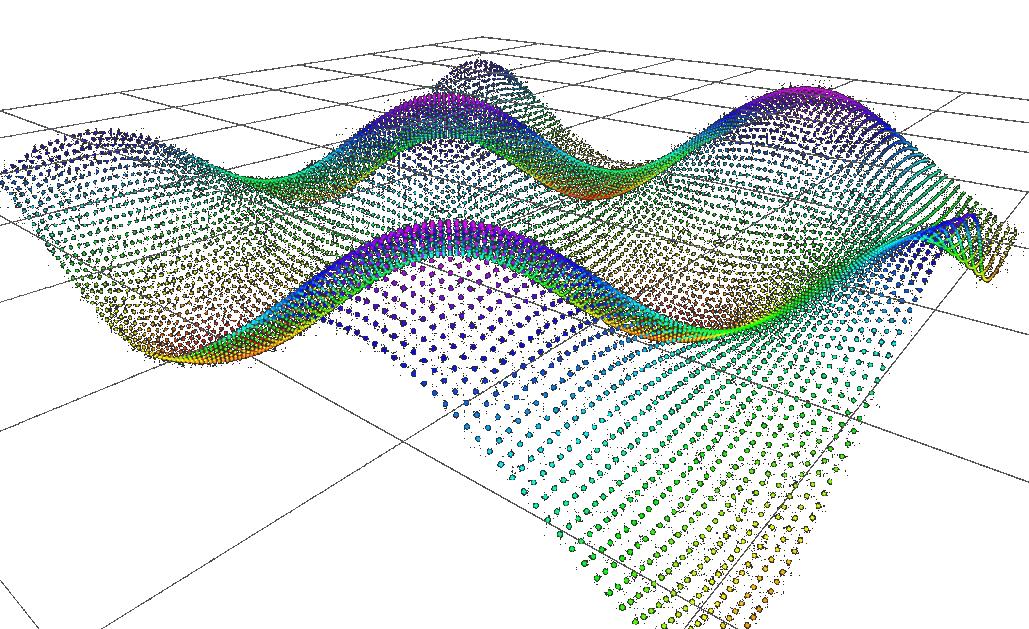
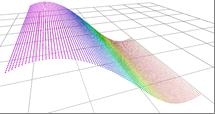
阅读如下代码,在划线处给出注释(12分),结合图片说明程序实现的功能(12分),如何改变图中三维点云(12分)。
import numpy as np
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import PointCloud2
from sensor_msgs.msg import PointField
from sensor_msgs_py import point_cloud2
from std_msgs.msg import Header ————————————————
class PointCloudPublisher(Node):
rate = 30
moving = True
width = 100
height = 100 ————————————————
header = Header()
header.frame_id = 'map'
dtype = PointField.FLOAT32
point_step = 16
fields = [PointField(name='x', offset=0, datatype=dtype, count=1),
PointField(name='y', offset=4, datatype=dtype, count=1),
PointField(name='z', offset=8, datatype=dtype, count=1),
PointField(name='intensity', offset=12, datatype=dtype, count=1)]
def __init__(self):
super().__init__('pc_publisher')
self.publisher_ = self.create_publisher(PointCloud2, 'test_cloud', 10)
timer_period = 1 / self.rate
self.timer = self.create_timer(timer_period, self.timer_callback)
self.counter = 0
——————————————————
def timer_callback(self):
self.header.stamp = self.get_clock().now().to_msg()
x, y = np.meshgrid(np.linspace(-2, 2, self.width), np.linspace(-2, 2, self.height))
z = 0.5 * np.sin(2*x-self.counter/10.0) * np.sin(2*y)
points = np.array([x, y, z, z]).reshape(4, -1).T
pc2_msg = point_cloud2.create_cloud(self.header, self.fields, points)
self.publisher_.publish(pc2_msg)
if self.moving:
self.counter += 1
——————————————————
def main(args=None):
rclpy.init(args=args)
pc_publisher = PointCloudPublisher()
rclpy.spin(pc_publisher)
pc_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()

以上是关于《ROS机器人程序设计》期中测评试卷 (ROS2)的主要内容,如果未能解决你的问题,请参考以下文章