关于用放大镜制作简易投影仪,成像不太清晰是啥原因?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了关于用放大镜制作简易投影仪,成像不太清晰是啥原因?相关的知识,希望对你有一定的参考价值。
制作投影仪,图像应该处于距离透镜中心大于焦距到二倍焦距之间,此时,通过透镜才能在屏幕上得到放大的倒立实像。
晚上室内开一电灯,在距电灯约等于准备使用投影机的投影距离处,用准备造投影机镜头的放大镜放在一硬纸板前,找出电灯在硬纸板上成像时,放大镜与纸板间的距离。
这就是做投影仪时,图像与该放大镜镜头之间的大约距离。
这距离也可以在晚上将手机亮度开大平放暗室地面,用放大镜置其上方,观察天花板上手机屏幕的投影图像,找出最清楚时放大镜与屏幕之间的距离,以此作为制作参考
当然,作为光源的画面亮度太低,在较明亮的环境下,尤其是作实物投影时,无法看清楚较暗的成像也是有可能的。

扩展资料
原理
为看清楚微小的物体或物体的细节,需要把物体移近眼睛,这样可以增大视角,使在视网膜上形成一个较大的实像。
但当物体离眼的距离太近时,反而无法看清楚。换句话说明,要明察秋毫,不但应使物体对眼有足够大的张角,而且还应取合适的距离。
显然对眼睛来说,这两个要求是相互制约的,若在眼睛前面配置一个凸透镜便能解决这一问题。凸透镜是一个最简单的放大镜,是帮助眼睛观察微小物体或细节的简单的光学仪器。
现以凸透镜为例,计算它的放大本领。
把物体PQ置于透镜L的物方焦点和透镜之间并使它靠近焦点,如图2-20(a)所示,于是物体经透镜成一放大的虚像P′Q′。
若凸透镜的像方焦距为10cm,则由该透镜做成的放大镜的放大本领为2.5倍,写成2.5×。如果仅从放大本领来考虑,焦距应该取得短一些,而且似乎这样可以得到任意大的放大本领。
但由于像差的存在,一般采用的放大本领约为3×。如果采用复式放大镜(如目镜),则可以减少像差,并使放大本领达到20×。
参考资料:百度百科-放大镜
参考技术A 普通放大镜是球面镜,其实际的“焦平面”应该是球形的。投影的图像是在一个平面上的,所以到透镜光心得距离是不同的,这样一来,像距也就不同了,你照顾中心清楚了,边缘就会模糊,边缘清楚了中心有步行了。这也是为什么投影也好、相机也好,它们的镜头都是多片透镜构成原因所在。追问所以不清晰是正常的吗?
追答是的
追问那么这个有什么办法能解决吗
追答多片镜片组合,这个自己不好弄;淘个放大机镜头试试吧,便宜好用
追问好的 谢谢~
本回答被提问者采纳 参考技术B 不用放大镜只能用小孔成像原理了,但是投影出来比较暗也不是很清晰。 参考技术C 可能是你距离调节不当,你可以在试试追问好吧 谢谢咯
追答不客气
摄像机模型
摄像机是三维空间物体与二维图像之间的一种映射。成像模型就是三维空间物体到二维视平面的投影关系。
针孔模型
透视投影(Perspective Projection)是最常用的成像模型,可以用针孔成像模型来近似表示。透视投影成像模型的特点是所有来自场景的光线均通过一个投影中心,它对应于透镜的中心,经过投影中心且垂直于图像平面(成像平面)的直线称为投影轴或光轴。

中心投影可以非常简单地表示成齐次坐标之间的线性映射。
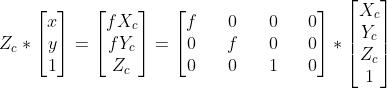
![[X_c,Y_c,Z_c]](https://image.cha138.com/20210610/436ecbd868b64d02a23fbc34566aa266.jpg) 为摄像机坐标系中的物体坐标
为摄像机坐标系中的物体坐标 ![[x,y]](https://image.cha138.com/20210610/efc3a00faf344712a80516308a90ee7e.jpg) 是物体投影在图像平面的位置。
是物体投影在图像平面的位置。
则有  , 其中K为3*4的摄像机投影矩阵。
, 其中K为3*4的摄像机投影矩阵。
摄像机模型
针孔模型的X是相对摄像机坐标系而言的,而往往摄像机是不断运动的(位姿在不断变化),空间点的世界坐标系是恒定不变的。摄像机坐标系和世界坐标系可以通过旋转和平移相联系。
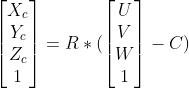
R是摄像机相对于世界坐标系的旋转矩阵,C表示位移。令  得:
得:
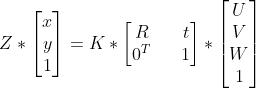
摄像机模型可表示为:
![P=K*[R|t]=K*\\begin{bmatrix}R&&t\\\\0^T&&1\\end{bmatrix}](https://image.cha138.com/20210610/80d44793561041dd849166f3cfc3f0a0.jpg)
 此处X是世界坐标系下的位置。
此处X是世界坐标系下的位置。
上述推导的摄像机模型是假定图像坐标在两个轴向上有等尺度的欧式坐标。但CCD摄像机的像素可能不是正方形。如果图像坐标以像素来测量,那么需要在每个方向上引入非等量尺度因子。
所以: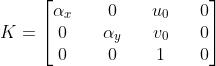
其中  、
、 ,m分别表示在x和y方向上图像坐标单位距离的像素数,
 表示像素量纲上图像的原点。
表示像素量纲上图像的原点。
摄像机模型的参数
![P=K*[R|t]](https://image.cha138.com/20210610/fc5fa2addc9e4bb5a067e276bd194bb8.jpg)
K是内参,R和t成为外参。
R为旋转矩阵
在三维空间中,旋转可以分解为绕各自坐标轴的二维旋转,如果依次绕x,y,x轴旋转角度
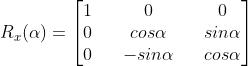
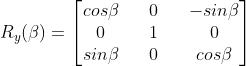
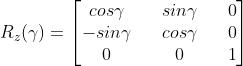
旋转矩阵R可以表示为  ,
,  ,
,  的乘机,因此
的乘机,因此
t为平移向量
表示摄像机坐标系原点在世界坐标系中的位置。
内外参数
P有10个自由度,3个来自R,3个来自t,4个是K中的内参。另外,由于P为3*4的不可逆矩阵,在已知P的情况下,为了得到空间点的三维世界坐标,就必须有两个或更多的相机构成的视觉系统模型才能实现。
以上是关于关于用放大镜制作简易投影仪,成像不太清晰是啥原因?的主要内容,如果未能解决你的问题,请参考以下文章