距离一长ros就路径规划失败原因
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了距离一长ros就路径规划失败原因相关的知识,希望对你有一定的参考价值。
参考技术A 当自己构建的路径规划插件和自己调用move_base的工程并不在一个目录下时,因为source操作覆盖掉前一个source操作,所以并不能在一个终端部两次source两个工程的setup。bash文件,会导致自己的movebase工程找不到插件,搜索注册插件库也看不到该插件。从github上git了一个turtlebot的仿真程序,把里面的规划器替换成了我的规划器,想着能见识一下自己写的规划器好不好,可以一运行就报错说找不到我写的规划器。
在source自己工程的setup。bash,使自己工程的环境变量生效。
也可以将自己写的规划器加入ros 的内置规划器中。
经典动态规划:编辑距离
本期例题:LeetCode 72. Edit Distance 编辑距离(Hard)
给定字符串
s和t,将s转换成t。你可以进行三种操作:插入一个字符、删除一个字符、替换一个字符。计算将s将转换成t的最小操作数。示例:
输入:word1 = "horse", word2 = "ros"
输出:3
解释:
horse -> rorse (将 'h' 替换为 'r')
rorse -> rose (删除 'r')
rose -> ros (删除 'e')
今天我们要讨论一道经典的二维动态规划问题:编辑距离(Edit Distance)。
你可能在各种地方都听说过「编辑距离」。编辑距离又叫莱文斯坦距离(Levenshtein distance),用于评估两个字符串的差异程度,在拼写检查、文本对比(diff)等场景中都有应用。编辑距离问题的实际意义使得它非常受面试官青睐。
编辑距离问题是 LeetCode Hard 题目,很多同学做这道题的时候会觉得很难,总是找不到思路。这道题的难点主要有两个:
-
第一,如何在拿到题目的时候想到可以用动态规划来解。这一般需要你做过二维动态规划的经典例题,然后联想到本题的思路。 -
第二,如何从题目描述中拆解出动态规划的具体思路。这需要你有一些拆解动态规划题目的技巧。
今天的文章会以编辑距离问题为例,讨论如何攻克动态规划问题的这两个难点。我们先讲讲如何从复杂的问题中拆解出动态规划的思路,再讲讲如何在动态规划题目之间进行联想。
编辑距离的拆解思路
假设你已经知道了编辑距离这道题是用动态规划来做,那怎么能进一步得出具体的思路呢?
动态规划题目的解题步骤我们都知道,要先定义子问题,再写出子问题的递推关系。道理我们都懂,但是对于具体的题目,如何定义子问题和子问题的递推关系还是很需要技巧的。
如果直接从整体看编辑距离,其实很难下手。究竟怎样组合插入、删除、替换操作,才能得到最少的编辑次数呢?这些操作之间又满足怎样的性质呢?
在做动态规划问题的时候,如果你觉得从全局考虑很困难,就试试先不考虑全局,从局部入手。我们可以只考虑其中的「一步」,至于剩下的步骤,就交给其他子问题完成就行。对于编辑距离来说,这「一步」就是指「单次的编辑操作」。
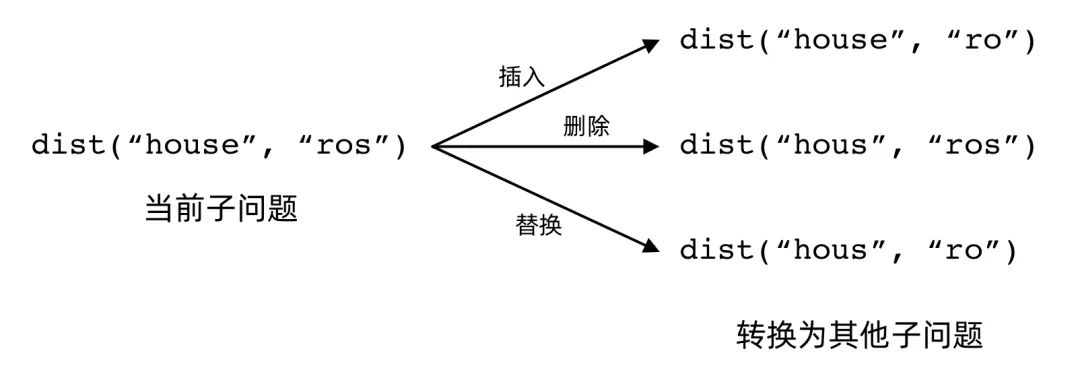
我们以 "horse" 和 "ros" 为例。我们考虑这「一步」做的是插入、删除还是替换操作。
-
如果做插入操作,那么插入的是 "ros" 末尾的 's',我们还需要计算 "horse" 到 "ro" 的编辑距离; -
如果做删除操作,那么删除的是 "horse" 末尾的 'e',我们还需要计算 "hors" 到 "ros" 的编辑距离; -
如果做替换操作,那么是把 "horse" 末尾的 'e' 替换为 "ros" 末尾的 's',我们还需要计算 "hors" 到 "ro" 的编辑距离。
为什么要关注「一步」呢?因为动态规划最关键的地方在于寻找「子问题的递推关系」,或者叫「状态转移方程」。所谓「递推关系」,就是一个子问题经过怎样的「一步」操作可以转换为另一个子问题。
例如,之前讲过的打家劫舍问题,计算子问题 的时候,我们可以有两种选择: 由 计算而来,或者 由 计算而来。也就是说,子问题 可以转换为 或 。
这有点类似递归的思路。我只需要把当前这一步计算做好,然后相信递归函数能帮我做好剩下的计算。动态规划其实很像递归,只不过动态规划一般是自底向上计算,保存每个子问题。
对于编辑距离问题,我们的「一步」有三种「选择」。选择插入、删除或者替换操作,我们可以将当前子问题转换为不同的子问题:
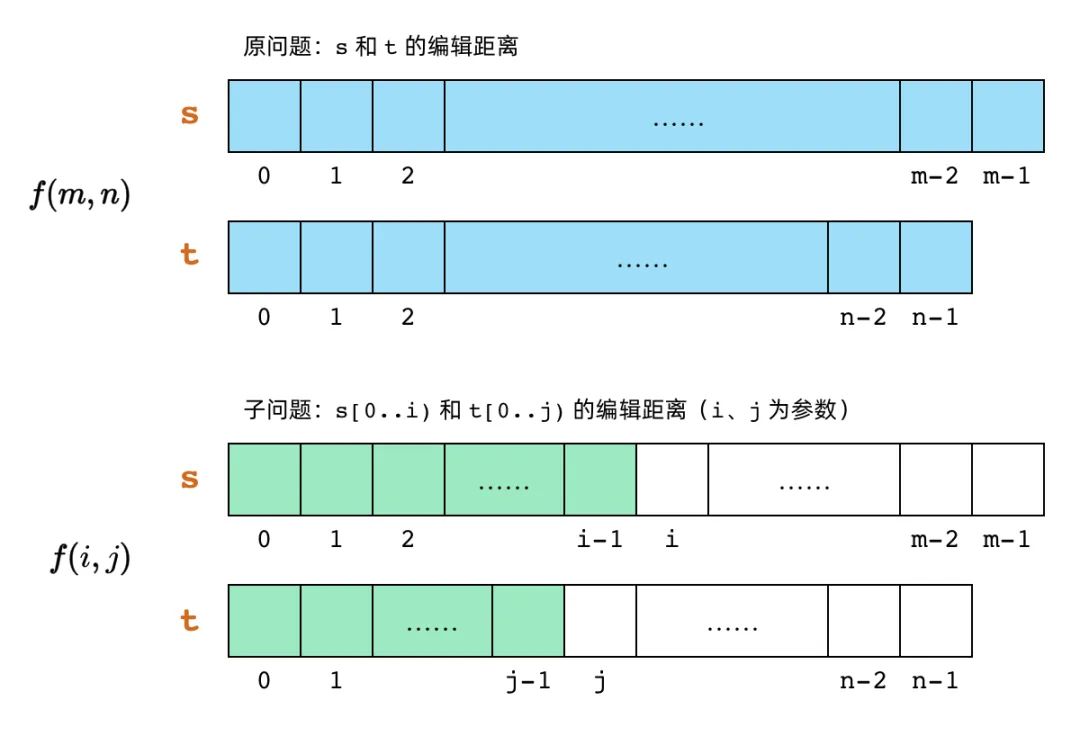
这样,编辑距离的子问题如何定义其实就相当清楚了。不同的子问题其实就是 s 和 t 有不同的长度。我们可以定义子问题
为「s[0..i) 和 t[0..j) 的编辑距离」。子问题的递推关系就有三个分支,分别对应插入、删除、替换三种操作。
这样,我们就有了动态规划解法的基本思路,接下来,我们继续套用动态规划的「解题四步骤」,来给出完整的题解吧。
套用解题四步骤
老规矩,我们使用动态规划的解题四步骤来写出题解代码。
步骤一:定义子问题
上文我们已经讨论了两个字符串的动态规划问题的子问题套路。和最长公共子序列问题一样,我们可以定义子问题
为「s[0..i) 和 t[0..j) 的编辑距离」。那么,这是一道二维动态规划问题。
步骤二:写出子问题的递推关系
子问题的递推关系就和三种编辑操作相对应。对于 s[0..i) 和 t[0..j) 的编辑距离,我们有三种方案:
-
删除 s[i-1],然后计算s[0..i-1)和t[0..j)的编辑距离 -
插入 t[j-1],然后计算s[0..i)和t[0..j-1)的编辑距离 -
将 s[i-1]替换为t[j-1],然后计算s[0..i-1)和t[0..j-1)的编辑距离
对于这三种方案,我们需要找出其中操作最少的方案。用公式写出来的话,就是:
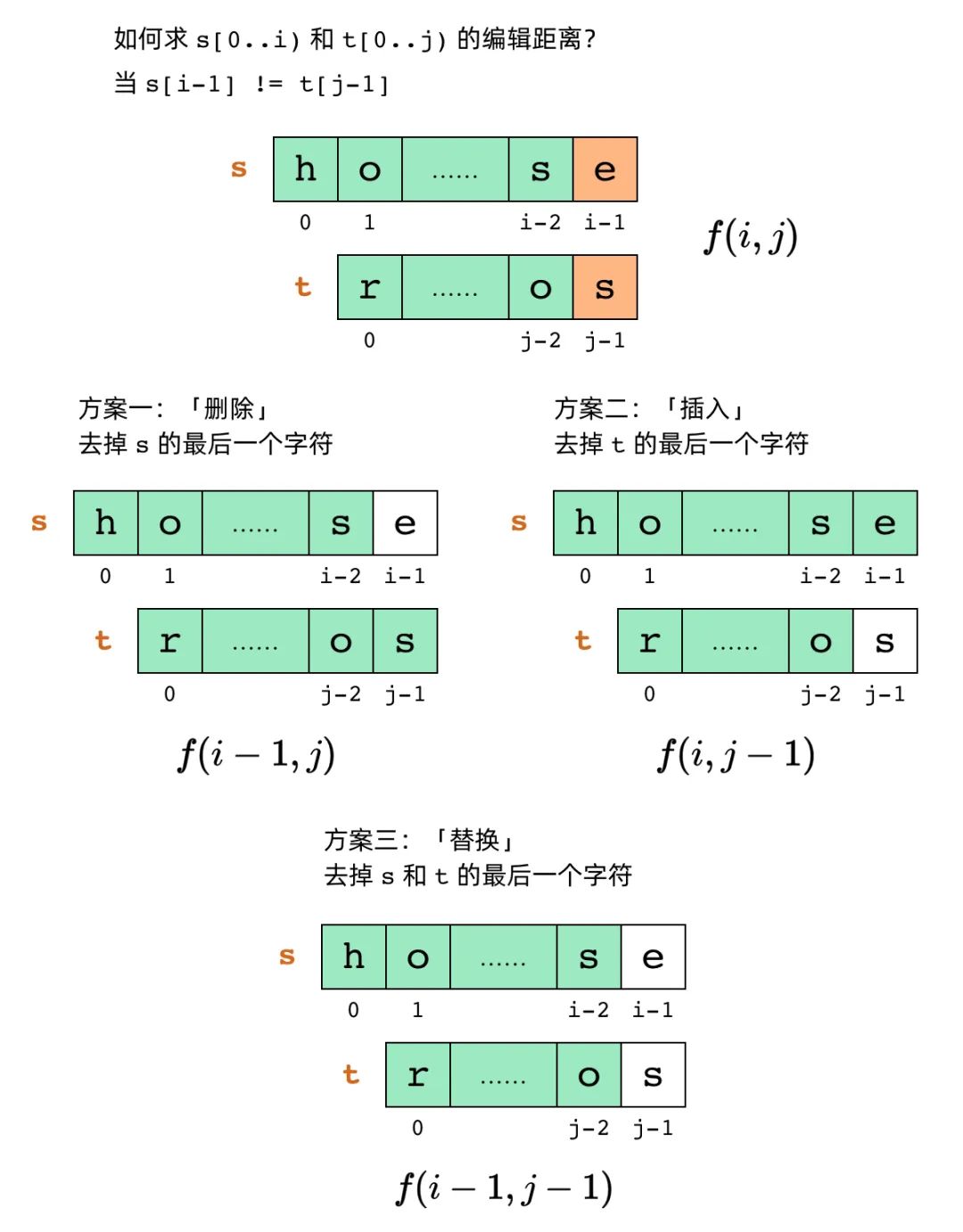
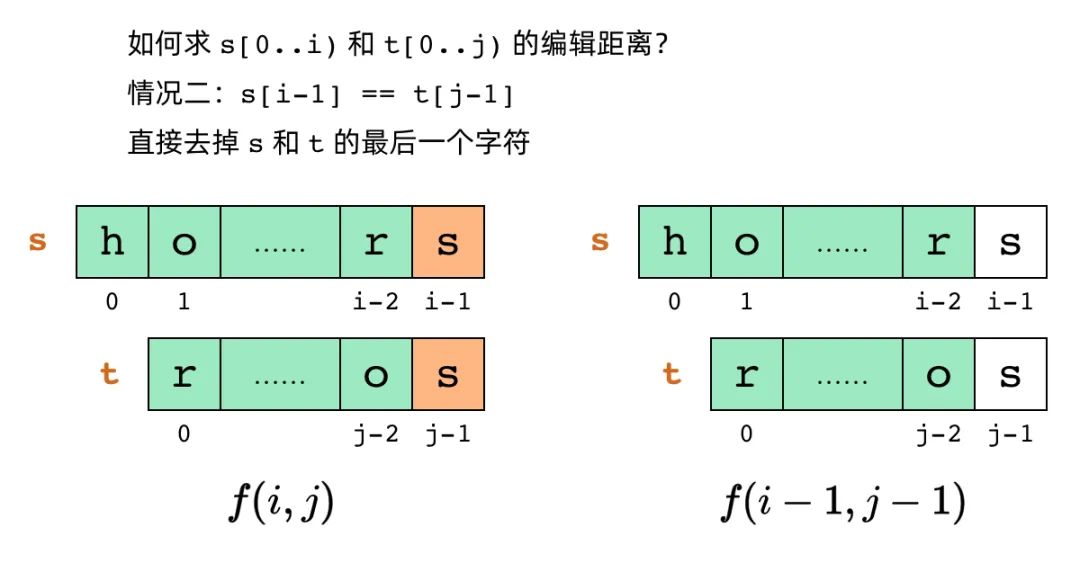
需要注意的是,上面的「替换」方案,如果 s[i-1] 和 t[j-1] 本来就相等的话,是不需要这一步替换的,编辑操作可以减少一次。那么,我们要比较 s[0..i) 和 t[0..j) 的最后一个字符,即 s[i-1] 和 t[j-1]。这可能会有两种情况:
第一种情况:如果 s[i-1] != t[j-1],我们可以做「插入」、「删除」或者「替换」操作。
第二种情况:如果 s[i-1] == t[j-1],那么这最后一个字符不需要进行任何编辑操作,我们可以去掉最后一个字符,然后计算 s[0..i-1) 和 t[0..j-1) 的编辑距离。用公式写出来的话,就是:
这样,我们得到最终的子问题递推关系为:
另外,别忘了递推关系的 base case。
-
当 时, s[0..i)为空,还剩t[0..j)的 个字符,我们需要做 次插入操作,因此 。 -
当 时,类似地,有 。
步骤三:确定 DP 数组的计算顺序
对于二维动态规划问题,我们需要定义二维的 DP 数组,其中 dp[i][j] 对应子问题
,即 s[0..i) 和 t[0..j) 的编辑距离。
设 s 的长度为
,t 的长度为
,则
、
的取值范围分别为:
。DP 数组是一个
的矩形。
为了确定 DP 数组的计算顺序,我们需要知道子问题的依赖方向。观察子问题的递推关系, 依赖于 、 和 ,我们在 DP 数组中画出依赖方向的箭头:
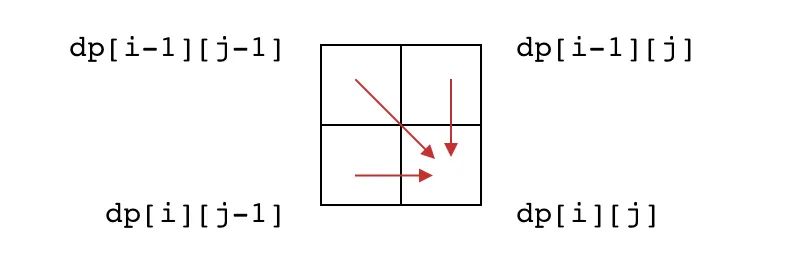
我们发现,编辑距离问题的子问题依赖方向和最长公共子序列问题一模一样!这是因为,在两道题目中, 都依赖于 、 和 。虽然具体的递推关系不一样,但是只要是这样的依赖关系,DP 数组的计算顺序就是一样的。
那么,编辑距离问题,DP 数组的计算顺序同样是从左到右、从上到下。我们应该以这样的顺序遍历 DP 数组:
for (int i = 0; i <= m; i++) {
for (int j = 0; j <= n; j++) {
// 计算 dp[i][j] ...
}
}
最终我们得到的题解代码为:
public int minDistance(String s, String t) {
// 子问题:
// f(i, j) = s[0..i) 和 t[0..j) 的编辑距离
// f(0, j) = j
// f(i, 0) = i
// f(i, j) = f(i-1, j-1), if s[i-1] == t[j-1]
// max: f(i-1, j) + 1
// f(i, j-1) + 1
// f(i-1, j-1) + 1, if s[i-1] != t[j-1]
int m = s.length();
int n = t.length();
int[][] dp = new int[m+1][n+1];
for (int i = 0; i <= m; i++) {
for (int j = 0; j <= n; j++) {
if (i == 0) {
dp[i][j] = j;
} else if (j == 0) {
dp[i][j] = i;
} else {
if (s.charAt(i-1) == t.charAt(j-1)) {
dp[i][j] = dp[i-1][j-1];
} else {
dp[i][j] = 1 + min3(
dp[i-1][j], // 删除操作
dp[i][j-1], // 插入操作
dp[i-1][j-1] // 替换操作
);
}
}
}
}
return dp[m][n];
}
private int min3(int x, int y, int z) {
return Math.min(x, Math.min(y, z));
}
这个算法的时间、空间复杂度均为
,其中
、
分别表示 s、t 的长度。
步骤四:空间优化(可选)
编辑距离问题本身属于较难的题目,所以我们写出基本的解法就可以,一般面试中不会追问空间优化的方法。
实际上,编辑距离、最长公共子序列这类问题有一种共同的空间优化方法。后面我会专门写一篇文章,给大家讲述动态规划的各种空间优化套路。
从 LCS 问题联想出思路
以上我们讲解了在「知道这道题是动态规划」的情况下该怎么拆解子问题。那么你可能要问了,在刚拿到这道题的时候,怎么才能想到它是一道动态规划题目呢?
答案很简单,从做过的题目进行联想。如果你觉得这道题和某个动态规划题目很像,那它多半可以用动态规划来做。
这道编辑距离问题,其实和我们讲过的最长公共子序列(LCS)问题非常相似。这两个题目都是涉及到两个字符串比较的「双串」题目。很容易联想到。
如果你对最长公共子序列(LCS)题目不太了解,可以回顾之前的文章:
我用 LCS 作为二维动态规划的例题,就是因为它的方法非常经典,很多其他题目中都有它的影子。
LCS 问题中其实蕴含了两个解题的小套路:
-
一般来说,涉及到「子序列」的问题,都是用动态规划来做。 -
一般来说,涉及两个字符串的动态规划问题,都可以使用 i、j两个指针分别指向两个字符串的尾部,然后向前移动。也就是说,定义子问题 表示子串s[0..i)和t[0..j)。
LCS 问题是关于求公共的子序列。编辑距离问题乍一看没有什么子序列,但联想起来,其实非常相似。
仔细看编辑距离问题的「插入」、「删除」、「替换」三个操作。其中「插入」和「删除」是相反的操作,从 s 转换到 t 插入的字符,相当于从 t 转换到 s 删除的字符。
那么,我们其实可以把所有的操作归类调整,分为三个阶段:
-
首先,做「删除」操作,从 s转换到s的一个子序列s’; -
接着,做「替换」操作,从 s’转换到t的一个子序列t’; -
最后,做「插入」操作,从 t’转换到t。
例如,下图中是 "intention" 转换为 "execution" 的实际例子:
这样就可以看出编辑距离问题也和「子序列」类问题非常相似。那么我们从这一点想到用动态规划的解法,也就很正常了。
在想到可以用动态规划解题之后,我们再根据具体的题目描述拆解子问题,前面的部分我们已经讲解了具体的操作了。
总结
本文用编辑距离问题展示了从实际问题中分析动态规划思路的技巧。很多动态规划的难题都是需要一定的拆解技巧。例如比较著名的两道:
-
LeetCode 312. Burst Balloons -
LeetCode 887. Super Egg Drop
(这两道题目都比较难,初学者不要轻易尝试)
同时,本文还展示了编辑距离问题与 LCS 的相似之处。两道题因为子问题的依赖关系是相同的,所以 DP 数组的计算顺序也完全一致。其实,很多动态规划题目都是可以「触类旁通」的。在刷题的时候,把做过的题目理解、吃透,能够让你在做新的题目的时候有更多的思路。
往期文章
以上是关于距离一长ros就路径规划失败原因的主要内容,如果未能解决你的问题,请参考以下文章