(02)Cartographer源码无死角解析-(23) 传感器数据类型自动推断与数据利用率计算
Posted 江南才尽,年少无知!
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了(02)Cartographer源码无死角解析-(23) 传感器数据类型自动推断与数据利用率计算相关的知识,希望对你有一定的参考价值。
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:
(02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885
文
末
正
下
方
中
心
提
供
了
本
人
联
系
方
式
,
点
击
本
人
照
片
即
可
显
示
W
X
→
官
方
认
证
\\colorblue文末正下方中心提供了本人 \\colorred 联系方式,\\colorblue点击本人照片即可显示WX→官方认证
文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
在前面的博客中,还有很多细节的东西没有讲解,如下:
CollatedTrajectoryBuilder::AddSensorData() 函数中的sensor::MakeDispatchable() 函数
CollatedTrajectoryBuilder::AddData(std::unique_ptr<sensor::Data> data) 函数的参数sensor::Data类
CollatedTrajectoryBuilder::HandleCollatedSensorData() 中 rate_timers_ 变量的使用
那么接下来就会对他们进行一个纤细的分析。
二、Dispatchable
首先来看 src/cartographer/cartographer/sensor/data.h 文件中的 class Data,这里就不啰嗦了,其就是一个接口类,该接口定义了两个纯虚函数,其只有一个成员 const std::string sensor_id_,该为 topic name。
该类的一个派生类位于 src/cartographer/cartographer/sensor/internal/dispatchable.h 中,值得注意的是该类为一个模板类,模板参数为 DataType。
template <typename DataType> //模板类,模板参数
class Dispatchable : public Data //继承于类 data
public:
//构造函数,同时调用会调用父类的构造函数。对参数data赋值给成员变量data_
Dispatchable(const std::string &sensor_id, const DataType &data)
: Data(sensor_id), data_(data)
//重写父类函数,直接返回 data_.time 即可(表示DataType类型的数据,必须还有成员变量.time)
common::Time GetTime() const override return data_.time;
// 重写父类函数,调用传入的trajectory_builder的AddSensorData()
void AddToTrajectoryBuilder(
mapping::TrajectoryBuilderInterface *const trajectory_builder) override
trajectory_builder->AddSensorData(sensor_id_, data_);
//返回成员变量data_的一个引用
const DataType &data() const return data_;
private:
const DataType data_;//构造函数初始化列表进行赋值,之后便不可再进行更改
;
另外,在 dispatchable.h 文件的下面,还可以看到如下代码:
// c++11: template <typename DataType>
// 函数模板的调用使用 实参推演 来进行
// 类模板 模板形参的类型必须在类名后的尖括号中明确指定, 不能使用实参推演
// 在类外声明一个 函数模板, 使用 实参推演 的方式来使得 类模板可以自动适应不同的数据类型
// 根据传入的data的数据类型,自动推断DataType, 实现一个函数处理不同类型的传感器数据
template <typename DataType>
std::unique_ptr<Dispatchable<DataType>> MakeDispatchable(
const std::string &sensor_id, const DataType &data)
return absl::make_unique<Dispatchable<DataType>>(sensor_id, data);
简单的说,其就是创建一个 Dispatchable类型的智能指针,该类型的模板参数为DataType。在创建时需要传入两个参数,分别为const std::string &sensor_id, 与 const DataType &data。
那么为什么要在 Dispatchable 的外面写这样一个函数呢?而不把他写在 class Dispatchable 之中呢?主要时应为类成员模板函数不具备自动推导模板参数的能力,而非成员函数,也就是普通函数时具备这个能力的。如CollatedTrajectoryBuilder.h 中如下一段代码:
// 处理雷达点云数据
void AddSensorData(
const std::string& sensor_id,
const sensor::TimedPointCloudData& timed_point_cloud_data) override
AddData(sensor::MakeDispatchable(sensor_id, timed_point_cloud_data));
其调用了 sensor::MakeDispatchable(sensor_id, timed_point_cloud_data) 函数,其会根据 timed_point_cloud_data 的类型,自动推导 sensor::MakeDispatchable 的模板参数 DataType= sensor::TimedPointCloudData。但是类别成员函数时不具备这个能力的。
sensor::TimedPointCloudData 的定义如下:
// 时间同步前的点云
struct TimedPointCloudData
common::Time time; // 点云最后一个点的时间
Eigen::Vector3f origin; // 以tracking_frame_到雷达坐标系的坐标变换为原点
TimedPointCloud ranges; // 数据点的集合, 每个数据点包含xyz与time, time是负的
// 'intensities' has to be same size as 'ranges', or empty.
std::vector<float> intensities; // 空的
;
与前面的推断一致,该结构体时存在成员变量 time 的。struct ImuData 同样包含成员变量time。
三、RateTimer逻辑分析
在 CollatedTrajectoryBuilder 中存在成员变量 rate_timers_,定义如下:
std::map<std::string, common::RateTimer<>> rate_timers_;
其是在回调函数 CollatedTrajectoryBuilder::HandleCollatedSensorData() 中被使用,该函数实现代码如下:
```cpp
/**
* @brief 处理 按照时间顺序分发出来的传感器数据
*
* @param[in] sensor_id 传感器的topic的名字
* @param[in] data 需要处理的数据(Data是个类模板,可处理多种不同数据类型的数据)
*/
void CollatedTrajectoryBuilder::HandleCollatedSensorData(
const std::string& sensor_id, std::unique_ptr<sensor::Data> data)
auto it = rate_timers_.find(sensor_id);
// 找不到就新建一个
if (it == rate_timers_.end())
// map::emplace()返回一个pair
// emplace().first表示新插入元素或者原始位置的迭代器
// emplace().second表示插入成功,只有在key在map中不存在时才插入成功
it = rate_timers_
.emplace(
std::piecewise_construct,
std::forward_as_tuple(sensor_id),
std::forward_as_tuple(
common::FromSeconds(kSensorDataRatesLoggingPeriodSeconds)))
.first;
// 对数据队列进行更新
it->second.Pulse(data->GetTime());
if (std::chrono::steady_clock::now() - last_logging_time_ >
common::FromSeconds(kSensorDataRatesLoggingPeriodSeconds))
for (const auto& pair : rate_timers_)
LOG(INFO) << pair.first << " rate: " << pair.second.DebugString();
last_logging_time_ = std::chrono::steady_clock::now();
// 也就是跑carto时候的消息:
// [ INFO]: collated_trajectory_builder.cc:72] imu rate: 10.00 Hz 1.00e-01 s +/- 4.35e-05 s (pulsed at 100.44% real time)
// [ INFO]: collated_trajectory_builder.cc:72] scan rate: 19.83 Hz 5.04e-02 s +/- 4.27e-05 s (pulsed at 99.82% real time)
// 将排序好的数据送入 GlobalTrajectoryBuilder中的AddSensorData()函数中进行使用
data->AddToTrajectoryBuilder(wrapped_trajectory_builder_.get());
其上的代码主要分为如下个部分(RateTimer位于src/cartographer/cartographer/common/internal/rate_timer.h):
( 1 ) : \\colorblue(1): (1): 其首先呢,会根据 sensor_id 在 rate_timers_ 这个字典中查找一下,是否已经创建了与 sensor_id 对应的 RateTimer 对象,如果没有则会实例化一个 RateTimer 对象,其传给构造函数的参数为kSensorDataRatesLoggingPeriodSeconds=15秒转换成标准时间的数据,然后赋值给成员变量RateTimer::window_duration_。
( 2 ) : \\colorblue(2): (2): 与当前 sensor_id 对应的 RateTimer 实例对象调用其成员函数 Pulse()。该函数如下所示:
// Records an event that will contribute to the computed rate.
// 对数据队列进行更新
void Pulse(common::Time time)
// 将传入的时间放入队列中
events_.push_back(Eventtime, ClockType::now());
// 删除队列头部数据,直到队列中最后与最前间的时间间隔小于window_duration_
while (events_.size() > 2 &&
(events_.back().wall_time - events_.front().wall_time) >
window_duration_)
events_.pop_front();
从上面可以看到Event 实例存在两个成员变量,第一个是传入的形参 time,其为订阅话题消息数据中的时间戳。第二个参数为调用该数据的时间。该函数的目录,就是计算在 window_duration_ 时间内,其共调用了多少(events_.size())数据。为了方便理解,下面举两个例子,因为HandleCollatedSensorData是回调函数,所以可能同时有多个线程执行到 Pulse(common::Time time):
①→假设为100个线程执行同时执行到Pulse,那么此时 events_ 中的这100个时间点,可得 events_.back().wall_time-events_.front().wall_time <window_duration_(15秒),不满足循环,此时 events_.size()=100也等于15秒的数据个数。
②→假设为20个线程执行到Pulse,且 events_.back().wall_time - events_.front().wall_time > window_duration_= 15秒。也就是说,接受数据比较快,但是调用数据时比较慢,此时就会把循环 events_ 第一个元素抛掉, 直到events_.back().wall_time - events_.front().wall_time < window_duration_。总的来说,events_包含的还是15秒内的.wall 时间点。其 events_.size()等于15秒的数据个数。
注 意 : \\colorred注意: 注意: 最终 events_.back().wall_time - events_.front().wall_time 表示15秒内调用数据的首尾差。
( 3 ) : \\colorblue(3): (3): 执行信息的打印,主要涉及到 RateTimer中的 DebugString() 函数:
// Returns a debug string representation.
std::string DebugString() const
if (events_.size() < 2)
return "unknown";
// c++11: std::fixed 与 std::setprecision(2) 一起使用, 表示输出2位小数点的数据
std::ostringstream out;
out << std::fixed << std::setprecision(2) << ComputeRate() << " Hz "
<< DeltasDebugString() << " (pulsed at "
<< ComputeWallTimeRateRatio() * 100. << "% real time)";
return out.str();
其打印的格式类似如下:
// 也就是跑carto时候的消息:
[ INFO]: collated_trajectory_builder.cc:72] imu rate: 10.00 Hz 1.00e-01 s +/- 4.35e-05 s (pulsed at 100.44% real time)
[ INFO]: collated_trajectory_builder.cc:72] scan rate: 19.83 Hz 5.04e-02 s +/- 4.27e-05 s (pulsed at 99.82% real time)
DebugString() 函数通过带哦用 ComputeRate(),DeltasDebugString(),ComputeWallTimeRateRatio() 分别计算频率,数据时间间隔的均值与标准差,以及数据生成与数据调用的比例。总体代码注释如下。
四、RateTimer代码注释
class RateTimer
public:
// Computes the rate at which pulses come in over 'window_duration' in wall
// time.
//explicit禁止隐式类型转换
explicit RateTimer(const common::Duration window_duration)
: window_duration_(window_duration)
~RateTimer()
RateTimer(const RateTimer&) = delete;//禁用默认拷贝构造函数
RateTimer& operator=(const RateTimer&) = delete;//禁用默认赋值=号赋值函数
// Returns the pulse rate in Hz.
// 计算平均频率,数据的个数 - 1 除以调用该批数据开始与结束的时间间隔
double ComputeRate() const
if (events_.empty())
return 0.;
return static_cast<double>(events_.size() - 1) /
common::ToSeconds((events_.back().time - events_.front().time));
// Returns the ratio of the pulse rate (with supplied times) to the wall time
// rate. For example, if a sensor produces pulses at 10 Hz, but we call Pulse
// at 20 Hz wall time, this will return 2.
//这里的events_表示window_duration_(默认15秒)内所有数据的
//生成时间.time(订阅话题msg的时间戳)与调用时间.wall_time
double ComputeWallTimeRateRatio() const
if (events_.empty())
return 0.;
//计算生产该批数据消耗的时间
return common::ToSeconds((events_.back().time - events_.front().time)) /
//除以该批数据被调用消耗的时间
common::ToSeconds(events_.back().wall_time -
events_.front().wall_time);
// Records an event that will contribute to the computed rate.
// 对数据队列进行更新
void Pulse(common::Time time)
// 将传入的时间放入队列中
events_.push_back(Eventtime, ClockType::now());
// 删除队列头部数据,直到队列中最后与最前间的时间间隔小于window_duration_
while (events_.size() > 2 &&
(events_.back().wall_time - events_.front().wall_time) >
window_duration_)
events_.pop_front();
// Returns a debug string representation.
std::string DebugString() const
if (events_.size() < 2)
return "unknown";
// c++11: std::fixed 与 std::setprecision(2) 一起使用, 表示输出2位小数点的数据
std::ostringstream out;
out << std::fixed << std::setprecision(2) << ComputeRate() << " Hz "
<< DeltasDebugString() << " (pulsed at "
<< ComputeWallTimeRateRatio() * 100. << "% real time)";
return out.str();
private:
struct Event
common::Time time;
typename ClockType::time_point wall_time;
;
// Computes all differences in seconds between consecutive pulses.
// 返回每2个数据间的时间间隔
std::vector<double> ComputeDeltasInSeconds() const
CHECK_GT(events_.size(), 1);
const size_t count = events_.size() - 1;
std::vector<double> result;
result.reserve(count);
for (size_t i = 0; i != count; ++i)
result.push_back(
common::ToSeconds(events_[i + 1].time - events_[i].time));
return result;
// Returns the average and standard deviation of the deltas.
// 计算数据时间间隔的均值与标准差
std::string DeltasDebugString() const
const auto deltas = ComputeDeltasInSeconds();
const double sum = std::accumulate(deltas.begin(), deltas.end(), 0.);
// 计算均值
const double mean = sum / deltas.size();
double squared_sum = 0.;
for (const double x : deltas)
squared_sum += common::Pow2(x - mean);
// 计算标准差
const double sigma = std::sqrt(squared_sum / (deltas.size() - 1));
std::ostringstream out;
out << std::scientific << std::setprecision(2) << mean << " s +/- " << sigma
<< " s";
return out.str();
std::deque<Event> events_;
const common::Duration window_duration_;
;
五、结语
结合上篇博客的结论→初始注册的回调函数,整理数据之后,最终都会调用到 sensor::Collator::AddTrajectory(),把数据传送给了 GlobalTrajectoryBuilder。那么该篇博客的重要代码:
double ComputeWallTimeRateRatio() const......
表示的,就是传感器数据的利用率,如下打印的 100.44%:
[ INFO]: collated_trajectory_builder.cc:72] imu rate: 10.00 Hz 1.00e-01 s +/- 4.35e-05 s (pulsed at 100.44% real time)
所以这里在打印的信息中,该信息是及为重要的,如果超过100%,那么说明系统能够处理更多的数据。
cartographer源码解析
cartographer为Google提供的激光SLAM开源库,通常通过其提供的ROS平台封装进行使用,该库结构清晰,模块完整,值得深入研究。
项目官网:https://google-cartographer.readthedocs.io/en/latest/
项目Github:https://github.com/cartographer-project/cartographer
环境安装与配置具体参考:https://www.cnblogs.com/lvchaoshun/p/9824528.html
安装过程中可能会碰到一些版本冲突之类的问题,耐心上网寻求解决方法。
温馨提示:本系列主要介绍源码内容,不介绍环境搭建,仅作为自己学习过程记录,可能会比较乱,有疑问欢迎留言讨论。
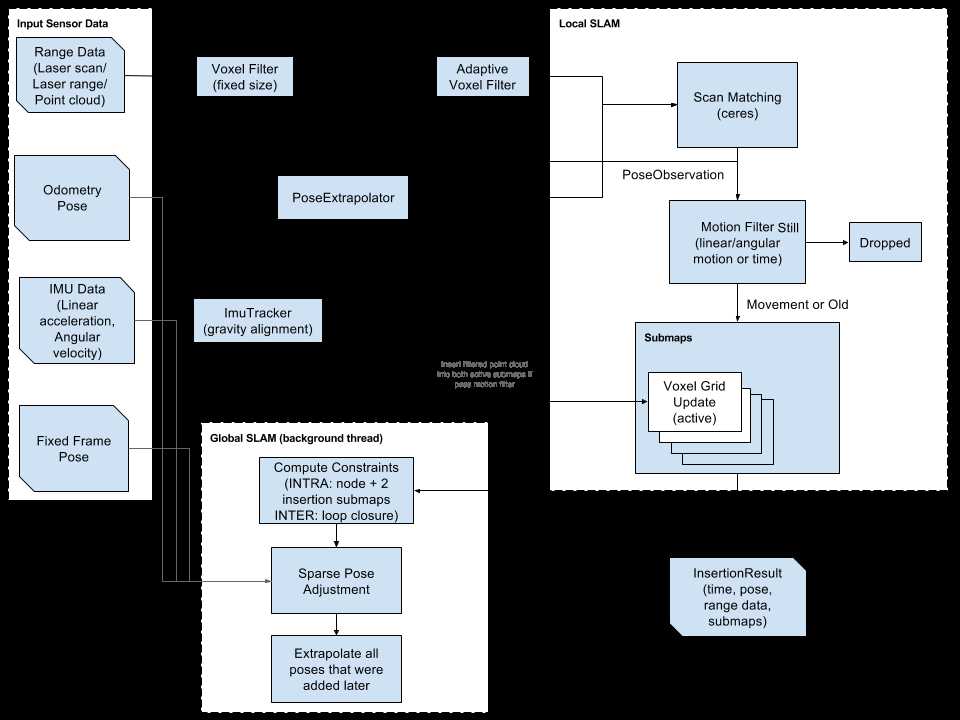
下面进入正题,下图是cartographer官网提供的软件架构图,本系列将通过cartographer_ros封装库中调用顺序,对程序主线进行介绍,暂未使用到的或次要的信息以后有空再分析。
首先我们找到cartographer_ros中程序入口,即cartographer_ros/cartographer_ros/cartographer_ros/node_main.cc,其中的main函数为cartographer_ros节点启动的程序入口。
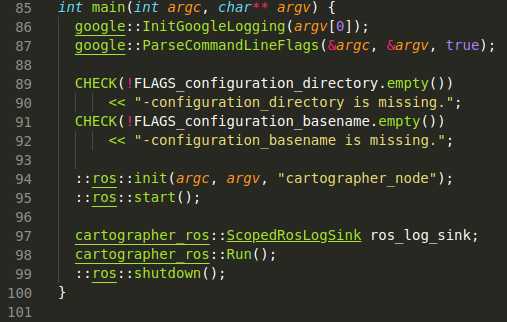
其他都是ros平台初始化相关的函数,只用看98行Run方法。
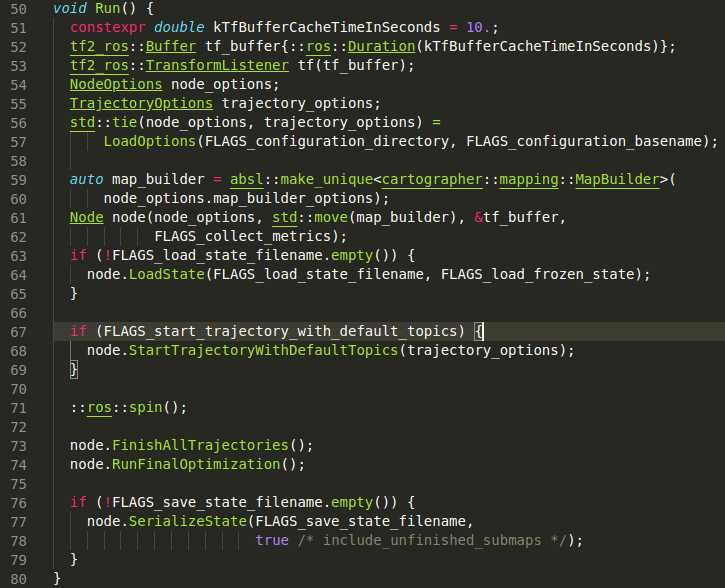
可以看到该函数内主要是些初始化工作,创建map_builder传给node进行初始化、读取pbstream地图文件,并调用StartTrajectoryWithDefaultTopics函数,该函数定义在node.cc中。

我们会发现AddTrajectory是核心功能入口。××该函数需重点关注,之后我们还会回来一个个分析其中调用的关键函数。
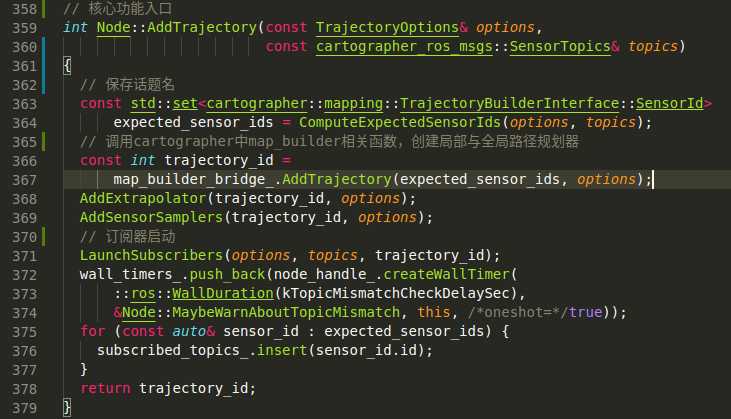
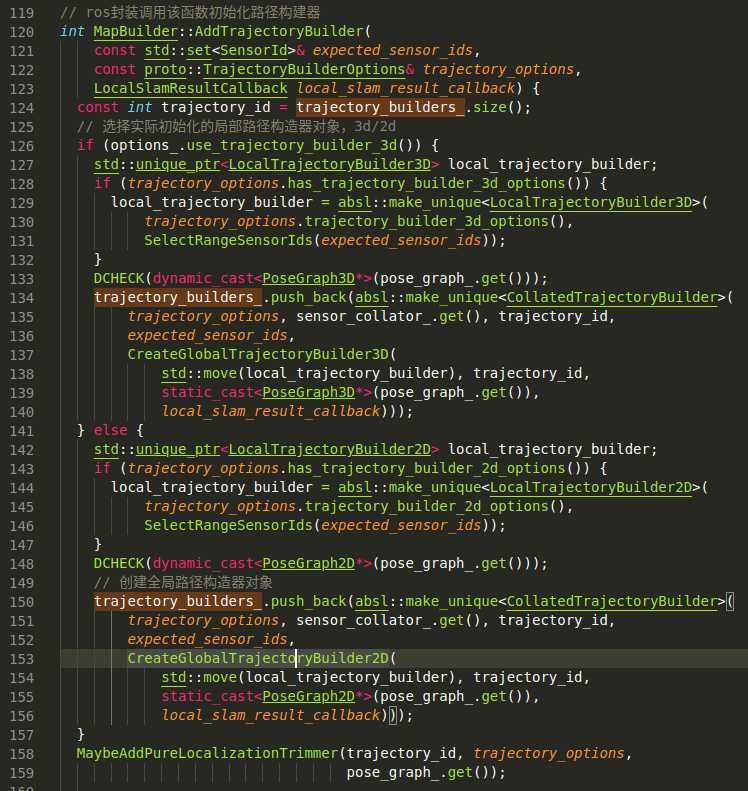
该函数功能比较多,我们一步步看。首先363行创建一个set保存传感器话题的编号,用于之后订阅器订阅。366行调用map_builder_bridge_实例的AddTrajectory函数,在cartographer_ros中类名包含“bridge”的类基本上都是作为“桥梁”调用cartographer源码的类。我们可以看到map_builder_bridge_为map_builder_bridge.cc中定义的MapBuilderBridge的实例,此时关注map_builder_bridge.cc中定义的AddTrajectory函数内容。
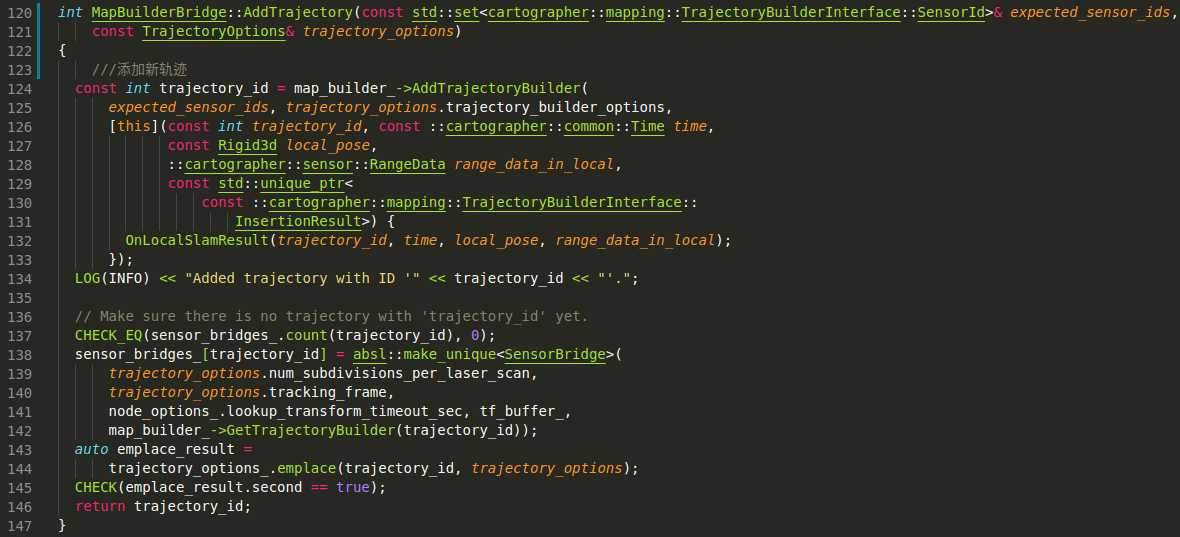
根据cartographer全局配置参数和最初Run方法中定义的map_builder实例类型,我们了解到map_builder_为cartographer/mapping/map_builder.cc中定义的MapBuilder类的实例。上图函数内容分为两块,一块调用map_builder_的AddTrajectoryBuilder函数,创建trajectory_builder并设置结果回调,返回一个路径id作为当前轨迹的编号,详情下篇再介绍;另一块主要初始化一个SensorBridge实例,并放入sensor_birdges_这个map中,以及保存该路径id对应的配置参数。
接下来我们回到node.cc中核心功能入口函数。368与369行分别创建与当前路径编号对应的位姿预测器(PoseExtrapolator)与传感器采样器(TrajectorySensorSamplers),根据配置参数创建实例没啥好说的。371行启动ros话题订阅器,并设置回调函数。这之后的创建定时器和记录话题编号也很简单。我们主要关注话题订阅的回调函数。
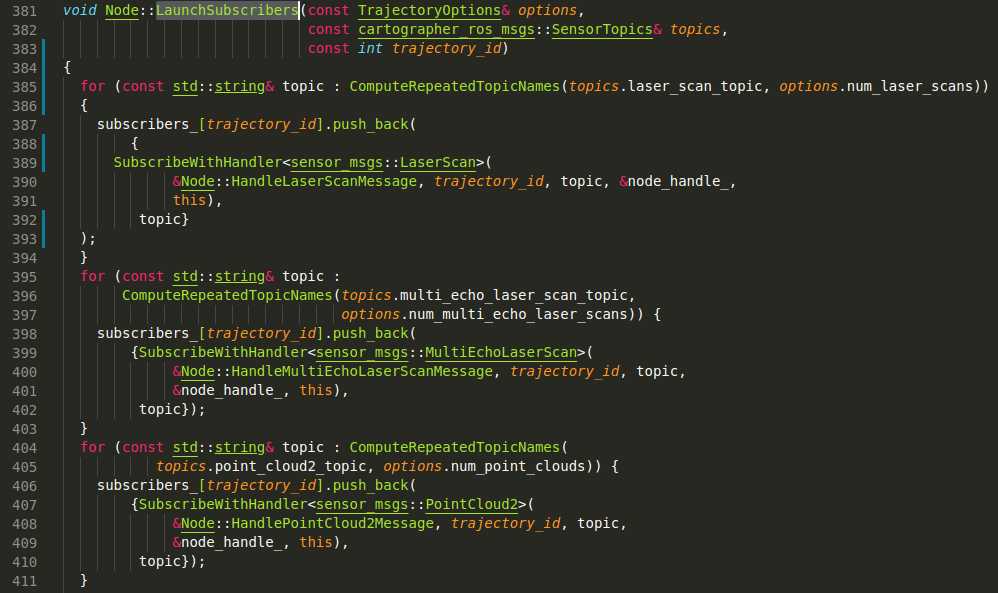
上图截取了LaunchSubsribers函数的部分代码,通过其回调函数,我们发现最终会调用sensor_bridge.cc中定义的HandleLaserScan函数。此处仅仅举个例子,该函数仅处理激光雷达数据(普通LaserScan类型消息、多回波、点云等),其他传感器数据(如IMU、里程计等)会调用不同的回调函数。
我们观察HandleLaserScan函数实现。
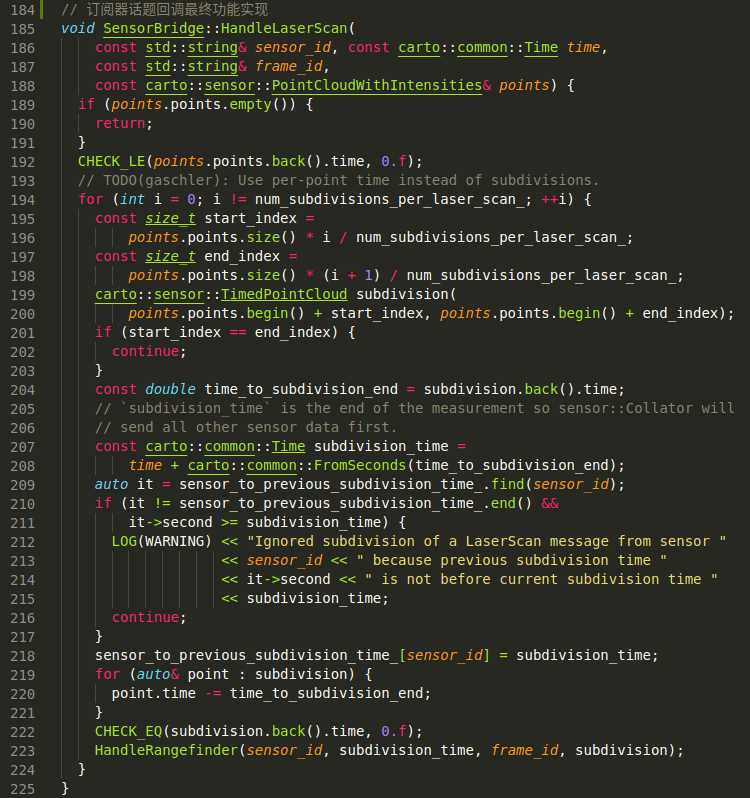
首先对点云细分,默认num_subdivisions_per_laser_scan_=10。points对象的类型为cartographer_ros自定义类型,其中保存了每个点的光强、位置与时间增量。time_to_subdivision_end保存了最后一个点的时间增量,即一块细分点云间时间间隔(第一个点之前的时刻到最后一个点之后的时刻之间的时间间隔)。之后做一些时间戳的运算,或许是诸如(..., -0.06, -0.04, -0.02, 0)的一组时间戳。最后调用HandleRangefinder将数据添加到全局路径构造器,如下图所示。
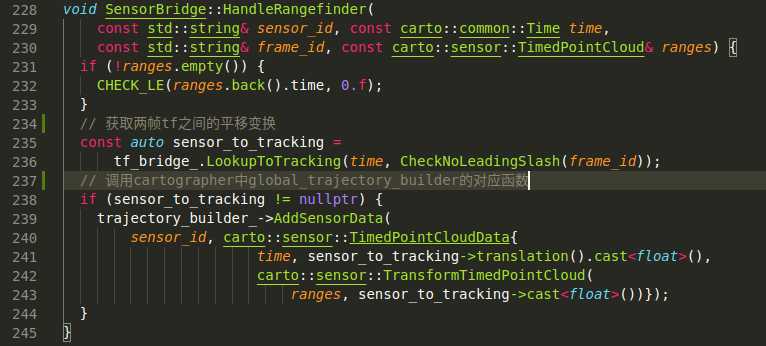
此处trajectory_builder_会是GlobalTrajectoryBuilder类的实例,是由于map_builder_的AddTrajectoryBuilder函数中调用了对应的构造函数,此处已涉及cartographer源码。
本节主要介绍了cartographer_ros封装是如何跳转到cartographer源码中的,主要包括ros节点、map_builder与trajectory_builder的创建,pose_extrapolator与trajectory_sensor_samplers的初始化以及传感器话题订阅与处理。从下一节开始,将根据调用顺序介绍cartographer源码。
以上是关于(02)Cartographer源码无死角解析-(23) 传感器数据类型自动推断与数据利用率计算的主要内容,如果未能解决你的问题,请参考以下文章