imx6+yocto project imx6q+qt5+xenomai 怎么玩法
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了imx6+yocto project imx6q+qt5+xenomai 怎么玩法相关的知识,希望对你有一定的参考价值。
参考技术A 编译完成后内核以及rootfs以及dtb会放在相对于build目录的tmp/deploy/images/imx6qsabresd/下面 各个文件都有一个软连接来指向最新编译产生的文件,因此如果需要看到最新的文件,可以直接使用软链接即可:迅为IMX8MM开发板Yocto系统设置开机自启动
1、Systemd 服务简介
Systemd 是 Linux 下的一种 init 软件,其开发目标是提供更优秀的框架以表示系统服务间的依赖关系,并以此实现系统初始化时,服务的并行启动,同时达到降低 Shell 系统开销的效果。它融合之前 service 和chkconfig 的功能于一体。可以使用它永久性或只在当前会话中启用/禁用服务。
内核启动完成后,传统的的启动首先执行的第一个进程是/sbin/init。如果要以 systemd 方式启动,首先让内核执行的第一个程序是/lib/systemd/system 或者/usr/lib/systemd/system。
启动以后,首先会去三个目录下找相应的配置文件,按优先级从高到低分别是/etc/systemd/usr/lib/systemd lib /lib/systemd/ 优先级高的配置文件会覆盖优先级低的配置文件。
2、创建服务文件
服务文件格式一般如下所示:
[Unit]
Description=nginx - high performance web server
Documentation=http://nginx.org/en/docs/
After=network.target remote-fs.target nss-lookup.target
[Service]
Type=forking
PIDFile=/run/nginx.pid
ExecStartPre=/usr/sbin/nginx -t -c /etc/nginx/nginx.conf
ExecStart=/usr/sbin/nginx -c /etc/nginx/nginx.conf
ExecReload=/bin/kill -s HUP $MAINPID
ExecStop=/bin/kill -s QUIT $MAINPID
PrivateTmp=true
[Install]
WantedBy=multi-user.target
[Unit]
Description : 服务的简单描述
Documentation : 服务文档
Before、After:定义启动顺序。
Before=xxx.service,代表本服务在 xxx.service 启动之前启动。
After=xxx.service,代表本服务在 xxx.service 之后启动。
Requires:这个单元启动了,它需要的单元也会被启动;它需要的单元被停止了,这个单元也停止了。
Wants:推荐使用。这个单元启动了,它需要的单元也会被启动;它需要的单元被停止了,对本单元没
有影响。
[Sravi r]
Type=simple(默认值):systemd 认为该服务将立即启动。服务进程不会 fork。如果该服务要启动其他
服务,不要使用此类型启动,除非该服务是 socket 激活型。
Type=forking:systemd 认为当该服务进程 fork,且父进程退出后服务启动成功。对于常规的守护进程
(daemon),除非你确定此启动方式无法满足需求,使用此类型启动即可。使用此启动类型应同时指定
PIDFile=,以便 systemd 能够跟踪服务的主进程。
Type=oneshot:这一选项适用于只执行一项任务、随后立即退出的服务。可能需要同时设置
RemainAfterExit=yes 使得 systemd 在服务进程退出之后仍然认为服务处于激活状态。
Type=notify:与 Type=simple 相同,但约定服务会在就绪后向 systemd 发送一个信号。这一通知的实
现由 libsystemd-daemon.so 提供。
Type=dbus:若以此方式启动,当指定的 BusName 出现在 DBus 系统总线上时,systemd 认为服务就绪。
Type=idle: systemd 会等待所有任务(Jobs)处理完成后,才开始执行 idle 类型的单元。除此之外,其他行
为和 Type=simple 类似。
PIDFile:pid 文件路径
ExecStart:指定启动单元的命令或者脚本,ExecStartPre 和 ExecStartPost 节指定在 ExecStart 之前或者之
后用户自定义执行的脚本。Type=oneshot 允许指定多个希望顺序执行的用户自定义命令。
ExecReload:指定单元停止时执行的命令或者脚本。
ExecStop:指定单元停止时执行的命令或者脚本。
PrivateTmp:True 表示给服务分配独立的临时空间
Restart:这个选项如果被允许,服务重启的时候进程会退出,会通过 systemctl 命令执行清除并重启的操作。
RemainAfterExit:如果设置这个选择为真,服务会被认为是在激活状态,即使所以的进程已经退出,默认的值为假,这个选项只有在 Type=oneshot 时需要被配置。
[Instwll]
Alias:为单元提供一个空间分离的附加名字。
RequiredBy:单元被允许运行需要的一系列依赖单元,RequiredBy 列表从 Require 获得依赖信息。
WantBy:单元被允许运行需要的弱依赖性单元,Wantby 从 Want 列表获得依赖信息。
Also:指出和单元一起安装或者被协助的单元。
DefaultInstance:实例单元的限制,这个选项指定如果单元被允许运行默认的实例。
3、操作服务
启动服务
systemctl start test.service
关闭服务
systemctl stop test.service
重启服务
systemctl restart test.service
显示服务的状态
systemctl status test.service
在开机时启用服务
systemctl enable test.service
在开机时禁用服务
systemctl disable test.service
查看服务是否开机启动
systemctl is-enabled test.service
查看已启动的服务列表
systemctl list-unit-files|grep enabled
查看启动失败的服务列表
systemctl --failed
4、配置自启动程序
本章节在此介绍一种使用 systemd 方式来配置任意开机自启动程序的方法。
1.首先将 iMX8MM 开发板上电启动,在开发板终端中进入到/home/root/目录下,执行如下命令创建一个脚本文件:
touch helloworld.sh
<ignore_js_op>
2.向 helloworld.sh 写入自定义的命令,作者写的命令如下所示,开机自动创建文件夹。
echo \'#!/bin/sh
mkdir -p /home/topeet/test
<ignore_js_op>
3.然后修改权限,输入以下命令:
chmod 777 /home/root/helloworld.sh
<ignore_js_op>
4.我们进入到“/lib/systemd/system/”目录下,并新建一个 helloworld.service 文件,命令如下:
cd /lib/systemd/system
vi helloworld.service
<ignore_js_op>
helloworld.service 文件的内容如下:
[Unit]
Description=helloworld
After=basic.service X.service thermal-zone-init.service
[Service]
ExecStart=/home/root/helloworld.sh
[Install]
WantedBy=multi-user.target
Description 需写入服务名, ExecStart 需要写入可执行文件的绝对路径。然后保存文件并退出,如下图所示:
<ignore_js_op>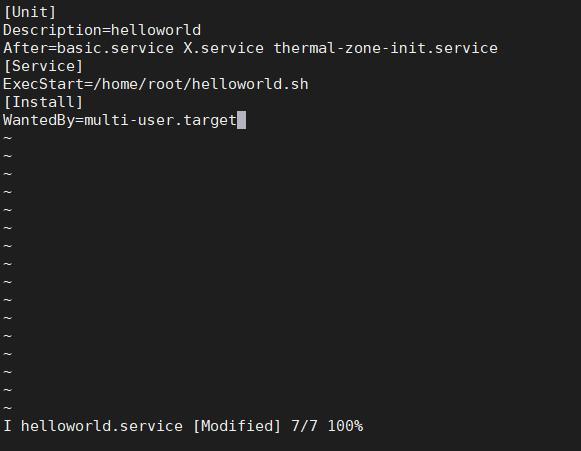
5.然后我们在串口终端输入以下命令
systemctl -f enable /lib/systemd/system/helloworld.service
<ignore_js_op>
6.此时即可将新添加的自启动服务生效,重启开发板后,此程序即可自动运行,查看是否生成了文件夹,如下图所示:
<ignore_js_op>
7.如果您自定义的服务启动不了,可以根据上一小节提供的方法查看服务的运行状态,查找原因。
以上是关于imx6+yocto project imx6q+qt5+xenomai 怎么玩法的主要内容,如果未能解决你的问题,请参考以下文章
经验分享-iMX6Q linux4.1.15 修改开机动画方法