ROS 计算图级,理解ROS 节点、话题
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS 计算图级,理解ROS 节点、话题相关的知识,希望对你有一定的参考价值。
参考技术A 计算图级-------是 ROS 处理数据的一种点对点的网络形式。程序运行时,所有进程及它们所进行的数据处理,将会通过一种点对点的网络形式表现出来,即通过节点、节点管理器、话题、服务等来进行表现。ROS 中的基本计算图级概念包括:节点、节点管理器、参数服务器、消息、服务、话题和包。这些概念以各种形式来提供数据。
ros 命令的说明及参数可以通过 < 命令 > -h (或 --help )来查看
例如: rosnode -h
用键盘控制小海龟运动这一过程的通信机制是怎样的呢?其实,这两个节点是通过一个 ROS 话题( Topic )来相互通信的, turtle_teleop_key 在这个话题上发布键盘输入的的消息,而 turtlesim 则订阅该话题以接收该消息。下面通过 rqt 功能包和 rostopic 命令来查看相关信息:
2, rostopic list :能够列出所有当前订阅和发布的话题。
先看一下 rostopic list 子命令需要哪些参数。运行命令:
rostopic list -h
使用 verbose 选项,以列出相关话题的详细信息。运行命令:
rostopic list -v
显示了有关所发布和订阅的话题的详细信息,其中方括号中表示的是话题的类型。
3, rostopic type :用来查看所发布话题的消息类型。
用法: rostopic type [topic] 运行如下命令:
rostopic type /turtle1/cmd_vel
上面的 geometry_msgs/Twist 即为话题 /turtle1/cmd_vel 的消息类型,这在执行命令 rostopic list -v 时
也有所体现。
下面用 rosmsg 命令来查看消息的详细情况:
rosmsg show geometry_msgs/Twist
4, rostopic pub :把数据发布到当前某个正在广播的话题上。通过此命令可以通过直接在终端发送命令来控制小海龟
用法: rostopic pub [topic] [msg_type] [args]
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
ROS1云课→06节点消息流(计算图级)
节点之间通过ROS1消息进行通信,当然这还需要网络层。
ROS1会创建一个连接到所有进程的网络。在系统中的任何节点都可以访问此网络,并通过该网络与其他节点交互,获取其他节点发布的信息,并将自身数据发布到网络上。
ROS2使用DDS。
在这一层级中最基本的概念包括节点、节点管理器、参数服务器、消息、服务、主题和消息记录包,这些概念都以不同的方式向计算图级提供数据:
- 节点(Node) 节点是主要的计算执行进程。如果想要有一个可以与其他节点进行交互的进程,那么你需要创建一个节点,并将此节点连接到ROS网络。通常情况下,系统包含能够实现不同功能的多个节点。你最好让每一个节点都具有特定的单一的功能,而不是在系统中创建一个包罗万象的大节点。节点需要使用如roscpp或rospy的ROS客户端库进行编写。
rosnode is a command-line tool for printing information about ROS Nodes.
Commands:
rosnode ping test connectivity to node
rosnode list list active nodes
rosnode info print information about node
rosnode machine list nodes running on a particular machine or list machines
rosnode kill kill a running node
rosnode cleanup purge registration information of unreachable nodes
Type rosnode <command> -h for more detailed usage, e.g. 'rosnode ping -h'
- 节点管理器(Master) 节点管理器用于节点的名称注册和查找等。它也设置节点间的通信。如果在你的整个ROS系统中没有节点管理器,就不会有节点、服务、消息之间的通信。需要注意的是,由于ROS本身就是一个分布式网络系统,你可以在某一台计算机上运行节点管理器,在该管理器或其他计算机上运行节点。
roscore
Usage: roscore [options]
roscore will start up a ROS Master, a ROS Parameter Server and a rosout
logging node
Options:
-h, --help show this help message and exit
-p PORT, --port=PORT master port. Only valid if master is launched
-v verbose printing
-w NUM_WORKERS, --numworkers=NUM_WORKERS
override number of worker threads
-t TIMEOUT, --timeout=TIMEOUT
override the socket connection timeout (in seconds).
See http://www.ros.org/wiki/roscore
- 参数服务器(Parameter Server) 参数服务器能够使数据通过关键词存储在一个系统的核心位置。通过使用参数,就能够在运行时配置节点或改变节点的工作任务。
rospara
rosparam is a command-line tool for getting, setting, and deleting parameters from the ROS Parameter Server.
Commands:
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names
- 消息(Message) 节点通过消息完成彼此的沟通。消息包含一个节点发送到其他节点的信息数据。ROS1中包含很多种标准类型的消息,同时你也可以基于标准消息开发自定义类型的消息。
rosmsg
rosparam is a command-line tool for getting, setting, and deleting parameters from the ROS Parameter Server.
Commands:
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names
- 主题(Topic) 每个消息都必须有一个名称以便被ROS1网络分发。每一条消息都要发布到相应的主题。当一个节点发送数据时,我们就说该节点正在向主题发布消息。节点可以通过订阅某个主题,接收来自其他节点的消息。一个节点可以订阅一个主题,而不需要该节点同时发布该主题。这就保证了消息的发布者和订阅者之间相互解耦,完全无需知晓对方的存在。主题的名称必须是独一无二的,否则在同名主题之间的消息路由就会发生错误。
rostopic
rostopic is a command-line tool for printing information about ROS Topics.
Commands:
rostopic bw display bandwidth used by topic
rostopic delay display delay of topic from timestamp in header
rostopic echo print messages to screen
rostopic find find topics by type
rostopic hz display publishing rate of topic
rostopic info print information about active topic
rostopic list list active topics
rostopic pub publish data to topic
rostopic type print topic or field type
Type rostopic <command> -h for more detailed usage, e.g. 'rostopic echo -h'
- 服务(Service) 在发布主题时,正在发送的数据能够以多对多的方式交互。但当需要从某个节点获得一个请求或应答时,就不能通过主题来实现了。在这种情况下,服务能够允许我们直接与某个节点进行交互。此外,服务必须有唯一的名称。当一个节点提供某个服务时,所有的节点都可以通过使用ROS客户端库编写的代码与它通信。
rosservie
Commands:
rosservice args print service arguments
rosservice call call the service with the provided args
rosservice find find services by service type
rosservice info print information about service
rosservice list list active services
rosservice type print service type
rosservice uri print service ROSRPC uri
Type rosservice <command> -h for more detailed usage, e.g. 'rosservice call -h'
- 消息记录包(Bag) 消息记录包是一种用于保存和回放ROS消息数据的文件格式。消息记录包是一种用于存储数据的重要机制。它能够获取并记录各种难以收集的传感器数据。我们可以通过消息记录包反复获取实验数据,进行必要的开发和算法测试。在使用复杂机器人进行实验工作时,需要经常使用消息记录包。
rosbag
Usage: rosbag <subcommand> [options] [args]
A bag is a file format in ROS for storing ROS message data. The rosbag command can record, replay and manipulate bags.
Available subcommands:
check Determine whether a bag is playable in the current system, or if it can be migrated.
compress Compress one or more bag files.
decompress Decompress one or more bag files.
filter Filter the contents of the bag.
fix Repair the messages in a bag file so that it can be played in the current system.
help
info Summarize the contents of one or more bag files.
play Play back the contents of one or more bag files in a time-synchronized fashion.
record Record a bag file with the contents of specified topics.
reindex Reindexes one or more bag files.
For additional information, see http://wiki.ros.org/rosbag
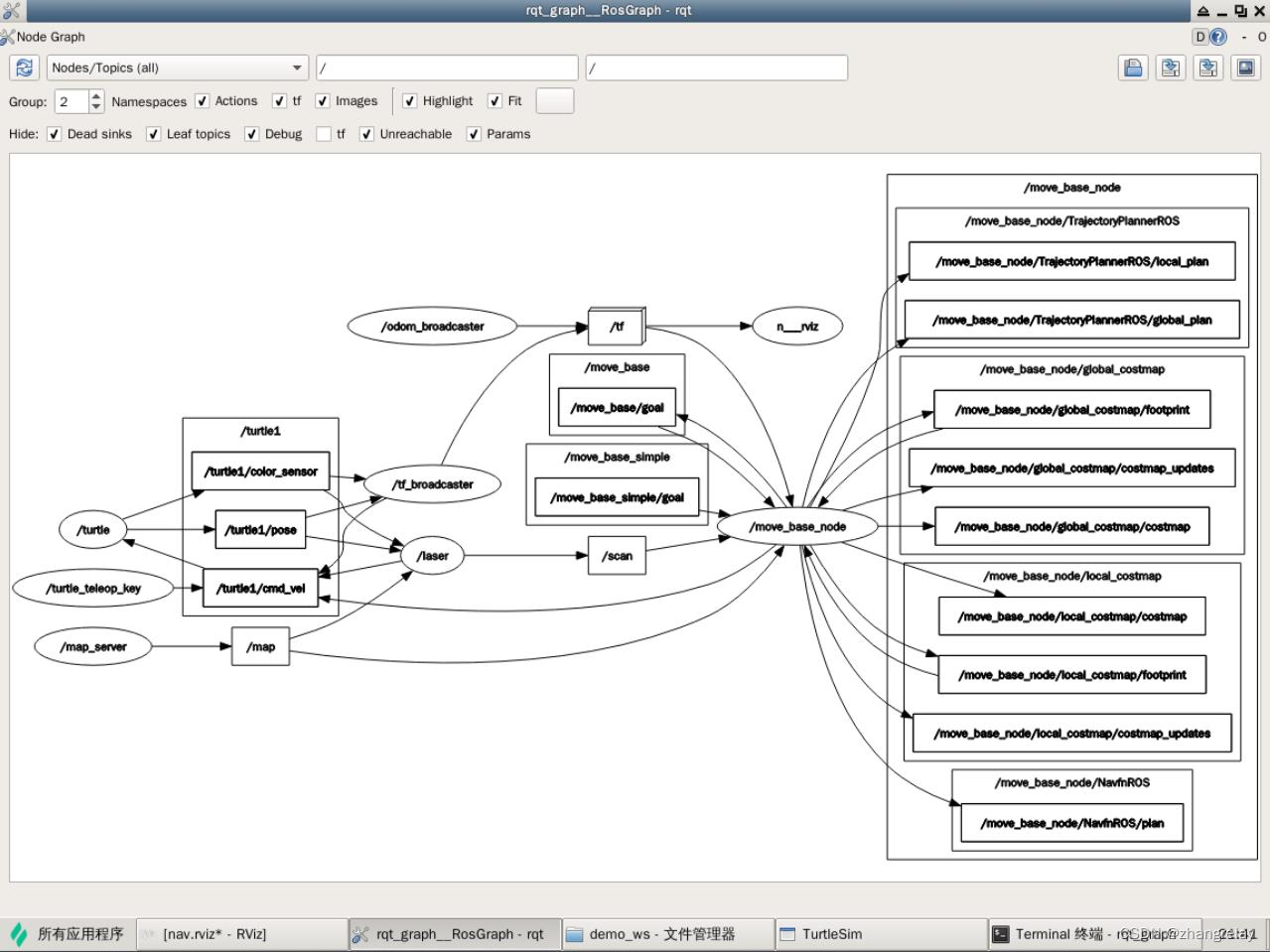
在下图中可以看到计算图级的图形化表示(节点状态图)。它表示了真实机器人在真实条件下系统的工作状态。在图中,可以看到节点和主题,以及哪些节点订阅哪些主题等。此节点状态图中并没有消息、消息记录包、参数服务器和服务。这些内容需要使用其他工具进行图形化展示。用于创建该图表的工具是rqt_graph,在后续课程中学习到更多的相关知识。
这些概念在ros-comm库中实现。
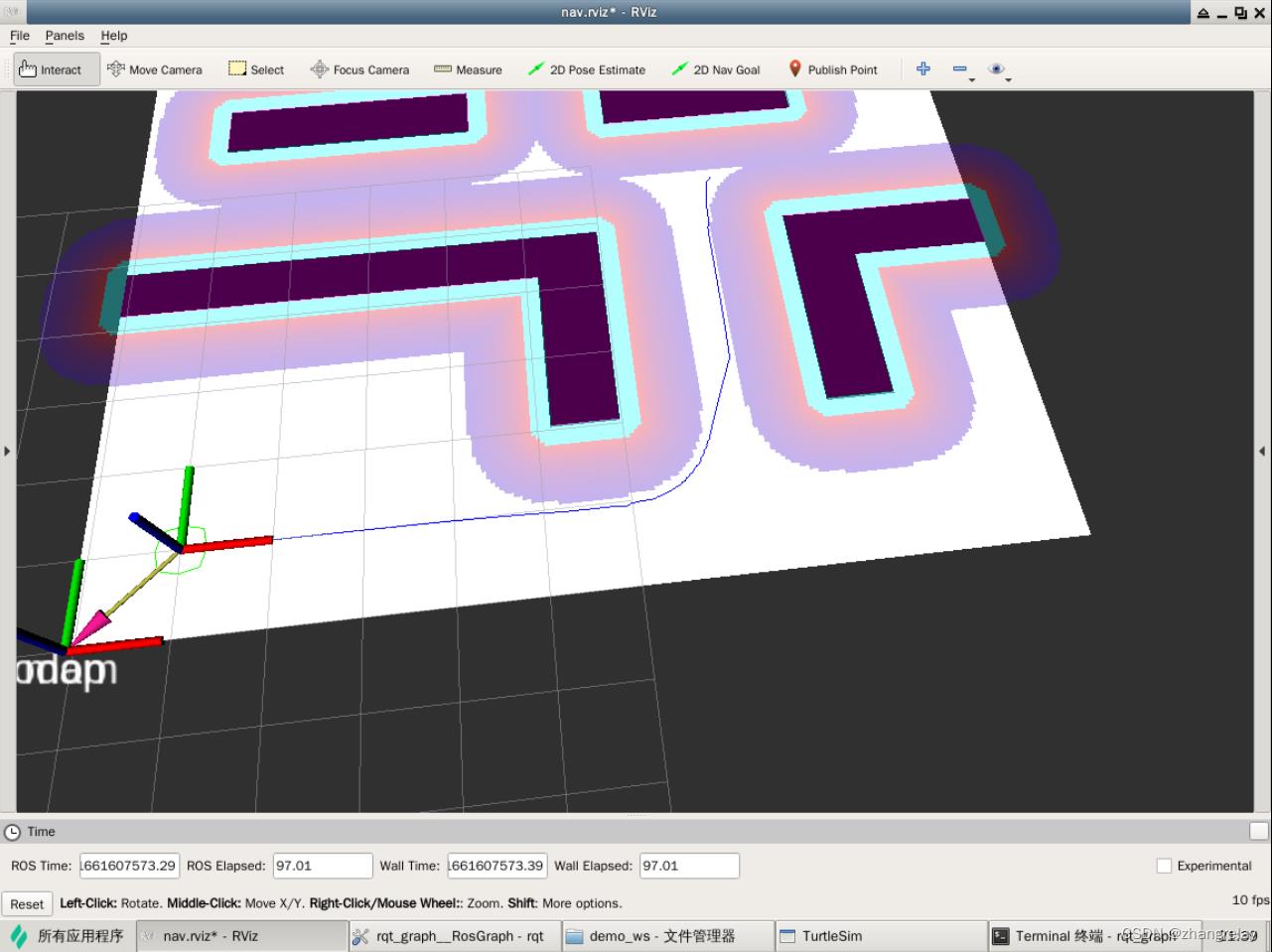
导航案例:
图形化展示节点信息流工具:
以上是关于ROS 计算图级,理解ROS 节点、话题的主要内容,如果未能解决你的问题,请参考以下文章