STM32CubeMX配置工程移植dmp库配合匿名四轴上位机三维动态显示测试
Posted perseverance52
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32CubeMX配置工程移植dmp库配合匿名四轴上位机三维动态显示测试相关的知识,希望对你有一定的参考价值。
STM32CubeMX配置工程移植dmp库配合匿名四轴上位机三维动态显示测试
- ✨该工程代码匹配的是匿名四轴上位机软件的2.6版本通讯协议,所以支持使用2.6版本的,最新的版本不支持。
- 🔖STM32CubeMX默认配置的是
stm32F103C8T6 - 📺演示效果:
🌼STM32CubeMX工程配置说明
- 🌿使用STM32CubeMX仅配置了串口1和I2C1。

🛠接线说明
匿名四轴上位机软件是通过对串口1数据进行解析后才能正确读取和显示出来的。
stm32 ------ MPU6050
PB6(SCL) ---- SCL
PB7(SDA) ---- SDA
VCC ---- VCC(3.3V)
GND ---- GND
-------
串口1:PA9 、 PA10
📑匿名四轴上位机2.6版本通讯协议介绍
通讯代码都是基于通讯协议编写的,就好像对暗号一样,暗号正确才会进行数据传输。
- 🎉通讯协议可以打开匿名上位机软件,按F12查看,以下是2.6版本通讯协议的全部内容:
一 :基本收发
1:收码和发码格式均可设为HEX或者CHR。
2:定时发送功能可以精确到毫秒,但是不能太快(发送为独占式,数据不发送完函数不会返回),如果上一帧
数据还没发送完毕就发送下一帧数据会出错。
3:请使用ft232串口芯片或支持高波特率的芯片,否则波特率无法设置过高。
二:高级收码
- 收码显示为HEX格式。
- 下位机发送自定义数据,格式为:0x88+FUN+LEN+DATA+SUM
FUN可以是 0xA1到0xAA,共10个;LEN为DATA的长度(不包括0x88、FUN、LEN、SUM)。
SUM是0x88一直到DATA最后一字节的和,uint8格式。(记得打开需要使用帧的开关,更改设置后点击保存设置使设置生效) - 数据可以是uint8、int16、uint16、int32、float这几个常用格式,多字节数据高位在前。
- 共有20个数据存储器,每个存储器的数据可以分别设置为来自10个自定义帧的30个数据。
- 高速通讯时(2ms一帧数据或者更快),请关闭高级收码页面的数据显示按钮和基本收码,否则更新过快有可能会造成程序卡死。
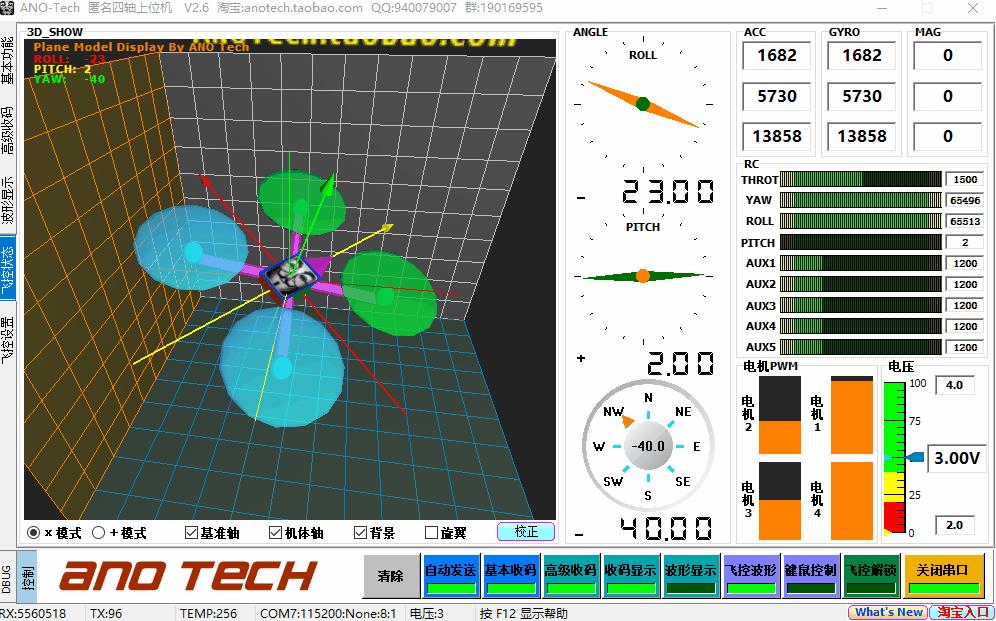
- 飞控显示对应的帧FUN为0xAF,(帧格式:
0x88+0xAF+0x1C+ACC DATA+GYRO DATA+MAG DATA+ANGLE DATA + 0x00 0x00 + 0x00 0x00+SUM,共32字节,ACC/GYRO/MAG/ANGLE(roll/pitch/yaw)数据为int16格式,其中ANGLE的roll和pitch数据为实际值乘以100以后得到的整数值,yaw为乘以10以后得到的整数值,上位机在显示时再 除以100和10)。 - 遥控,电机pwm,电压显示对应的帧FUN为0xAE,(帧格式:0x88+0xAE+0x12+THROT YAW ROLL PITCH+AUX1 2 3 4 5 + PWM:1 2 3 4 + VOTAGE + SUM,共28字节),数据为uint16格式,遥控数据最小在1000左右,最大在2000左右。数据都为uint16格式,其中pwm范围1-100,votage为实际值*100。
小技巧:如果高速通讯时是为了画波形,就只开波形显示,并只保留需要观察的波形,如果是为了观察数据,就关闭波形显示,只保留收码显示,这样可以加快程序响应速度。 - 最快通讯速度测试过下位机用500K波特率,每1ms发送32字节的数据,上位机显示其中6条波形,OK!(有可能和电脑配置有关)
三:波形显示
1:共有20条波形,对应20个数据存储器。
2:双击波形绘制区域,可以打开波形显示开关。
3:按住Ctrl用鼠标左键点击某一条波形,可以显示数据标签,再次点击隐藏。
4:按住鼠标左键,在绘图区域从一点向右下方拖动,然后松开,可以放大显示框住的波形区域,可以多次放大;
5:按住鼠标左键,在绘图区域从一点向左上方拖动,然后松开,可以将放大后的波形还原。
6:按住鼠标右键,在绘图区域上下左右拖动,可以移动波形。
7:显示波形时按F9键,可以打开波形高级设置。
四:DEBUG功能
- 在调试过程中可以将某些标志位、寄存器、变量实时发回上位机,并在DEBUG页面显示。
- 通讯格式为:0x88 + 0xAD + len + num + DATA + SUM, len为num与DATA的总长度,num表示要改变哪个显示状态,例如num=0x01即是要改变第一个LED,num=0x07即是改变第一个数字输出显示。当要改变LED时,DATA只需一字节,DATA=0x00表示关闭LED,大于0x00表示点亮LED;当要改变数字输出时,DATA需要两字节,表示 一个uint16数字,高字节在前。SUM为从0x88开始到SUM前一字节的和校验,uint8格式。
例如:发送 0x88 + 0xAD + 0x02 + 0x01 + 0x01 + 0x39 表示点亮第一个LED
发送 0x88 + 0xAD + 0x03 + 0x07 + 0x00 + 0x05 + 0x44 表示在第一个数字输出位置显示 5 。
五:键鼠控制
- 控制数据发送格式为:0x8A + 0x8A + 0X1C + THROT YAW ROLL PITCH AUX1 AUX2 AUX3 AUX4 AUX5 + 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 + SUM,遥控数据都为int16格式,中值1500,最小最大值为1000、 2000。
- 发送频率 50Hz。
- 鼠标上下控制油门,左右控制YAW,键盘的WASD控制ROLL/PITCH,键盘12345控制AUX12345。共9通道。
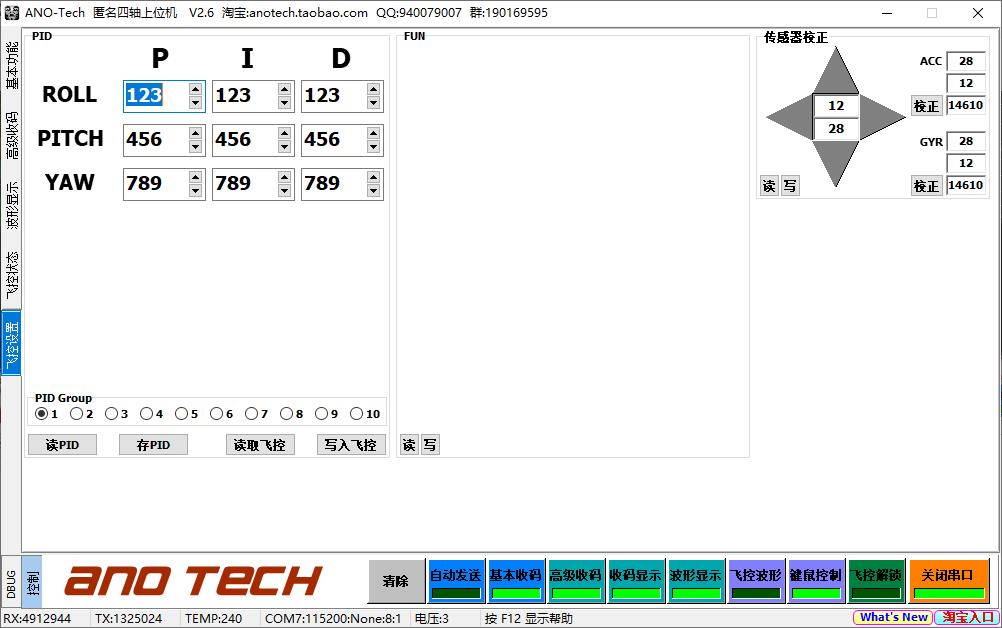
六:飞控参数
- 点击3D模型显示右下方的校正按钮,上位机会发送0X8A 0X8B 0X1C 0XAA 0XA3 +无用数据+SUM给下位机,
其中0X8B表示飞控参数,0XAA表示零偏,0XA3表示ACC GYRO都要校正。 - 点击飞控参数界面传感器矫正功能里面的校正按钮,分别表示ACC 和GYRO的校正,不会同时校正两个传感器,上位机校正ACC发送格式为:0X8A 0X8B 0X1C 0XAA 0XA1+无用数据+SUM上位机校正GYRO发送格式为:0X8A 0X8B 0X1C 0XAA 0XA2+无用数据+SUM(送有数据整个长度都为32字节)
- 上位机发送微调后的offset数据(仅为ACC的 X 和 Y ),格式为0X8A 0X8B 0X1C 0XAB + offset.x + offset.y +无用数据 +SUM,数据为int16格式。
- 上位机发送读offset的命令格式为:0X8A 0X8B 0X1C 0XAC + 无用数据 + SUM
- 上位机发送读PID数据的命令为:0X8A 0X8B 0X1C 0XAD + 无用数据 + SUM
- 下位机发送offset数据给上位机的格式为:0X88 0XAC 0X1C 0XAC + 传感器零偏数据ACC XYZ GYRO XYZ +无用数据+SUM,共六个int16型数据。
- 下位机发送PID数据给上位机的格式为:0X88 0XAC 0X1C 0XAD + PID数据 + 无用数据 + SUM
PID数据为rol_p,rol_i,rol_d,pit_p…i…d,yaw_p,i,d,共9个uint16型数据。 - 上位机发送PID数据给下位机的格式为:0X8A 0X8B 0X1C 0XAE +PID数据+ 无用数据 + SUM
PID数据格式和下位机发送给上位机的格式一样。 - 点击飞控解锁按钮,上位机会发送0X8A 0X8B 0X1C 0XA1+无用数据+SUM给下位机,如果下位机已经解锁,点击此按钮会发送0X8A 0X8B 0X1C 0XA0+无用数据+SUM给下位机,锁定飞控。
在上面的相关参考文章中,前者总结的5个通讯办法如下:
- 1个自定义数据帧+4个官方数据帧
自定义数据帧:发送MPU6050的原始数据 和 官方数据帧。
- 官方数据帧:
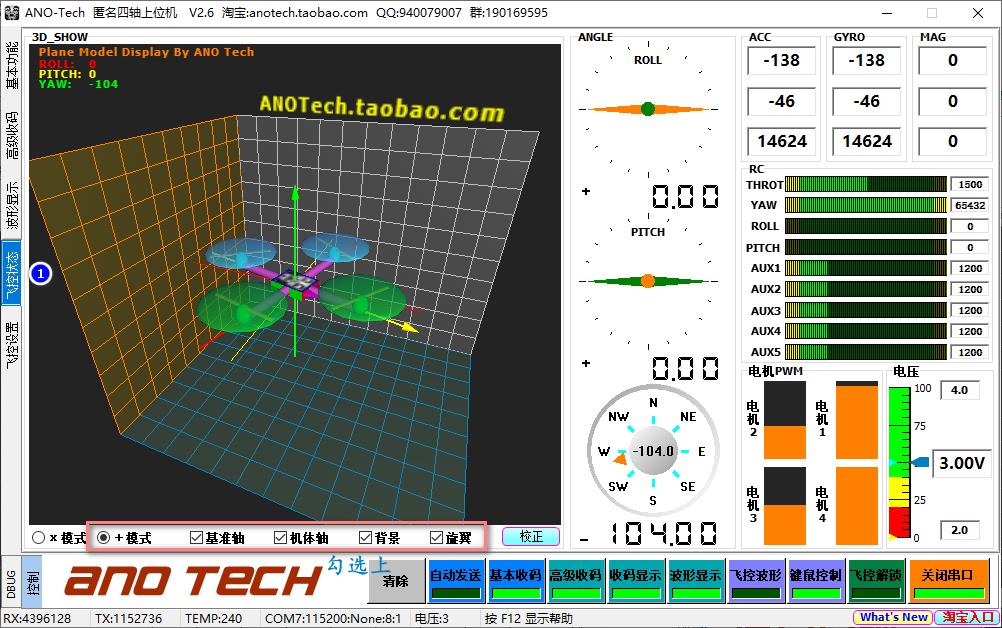
- 飞控显示帧,实现在上位机上观看到四轴的3D动画和波形
- 遥控器数据发送帧:将遥控器的各个数据发送到上位机包括PWM占空比
- PID数据发送帧:将STM32中设定的PID参数发送到上位机
- 零偏数据发送帧:将STM32中测定的零偏值发送给上位机
⛳上位机配置界面设置介绍(重点内容)
-
🌿设置串口端口号和波特率(工程默认配置的是115200)具体参数如下:
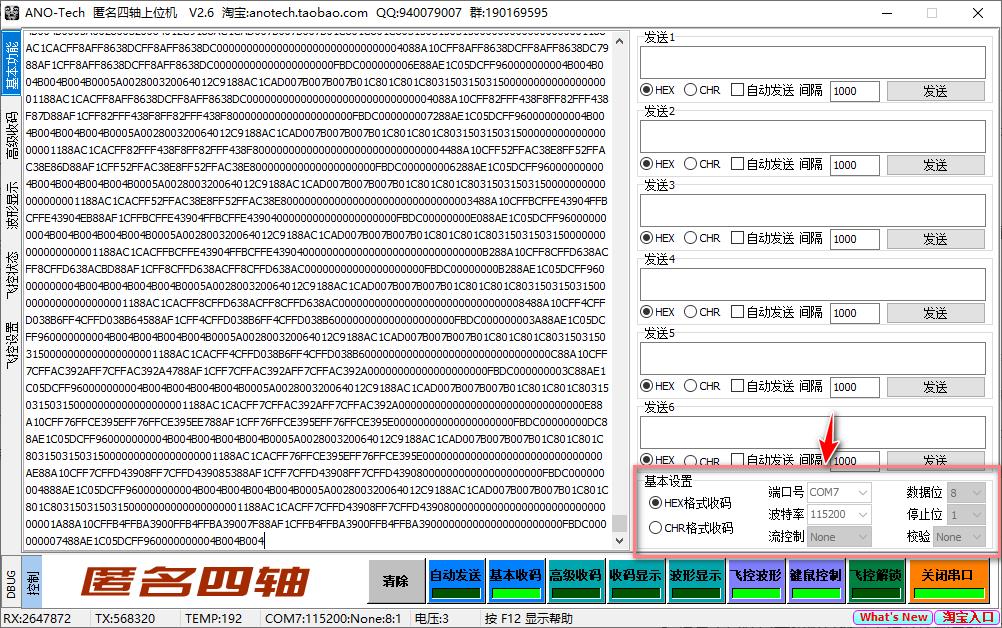
-
高级收码配置项:
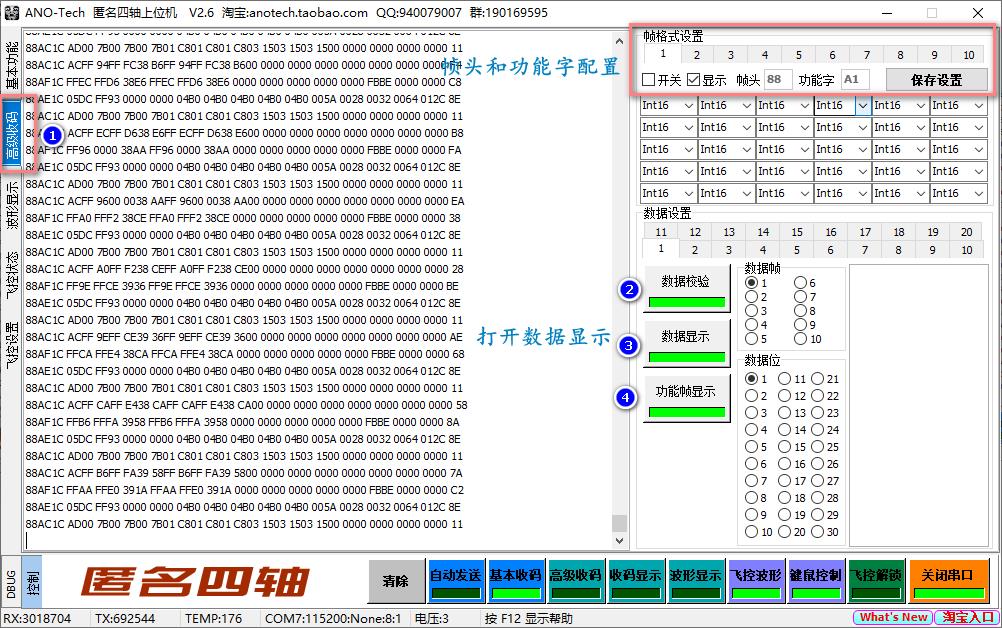
-
🌿波形显示,勾选对应的串口端口号,开启高级收码,飞控波形按钮都要打开。
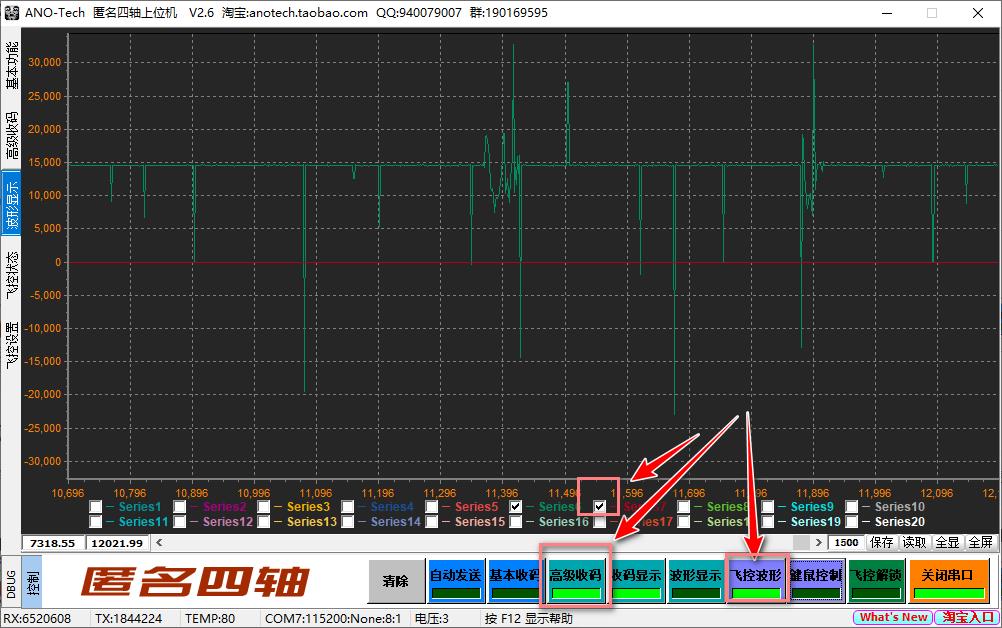
-
🌿飞控状态,根据个人需求勾选
- 🌿飞行控制,不用管,代码工程中没有涉及到此功能,只是观测效果。
🔨状态开启和切换
🔰下面一排是功能开启,绿色状态的为开启状态,暗绿的是没有开启。如果要看效果,一定要开启
高级收码
- 从
波形状态切换到飞控状态,可以直接点击下面的键鼠控制按键即可完成切换,但是要切换到波形状态需要通过点击左侧边上的飞控状态,才可切换回去。

📝主程序代码部分
/* USER CODE BEGIN Header */
//相关接线
//stm32 MPU6050
//PB6(SCL) ---- SCL
//PB7(SDA) ---- SDA
// VCC ---- VCC
// GND ---- GND
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
#include "stdio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define u8 uint8_t
#define u16 uint16_t
#define u32 uint32_t
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void usart1_send_char(u8 c)
HAL_UART_Transmit(&huart1 , &c, 1, 0xFFFF);
/**
* 功能:发送数据给匿名上位机(V2.6)
* 入口参数:fun,功能字,0xA0~0xAF
* data,数据缓存区,最多28个字节
* len,data数据长度
* 返回值:无
* 注:数据格式:0x88+FUN+LEN+DATA+SUM
*/
void usart1_niming_report(u8 fun,u8 *data,u8 len)
u8 send_buf[32]=0x00;
u8 i;
if(len>28) return;//超过28个字节,无效
send_buf[len+3]=0;//校验位置零
send_buf[0]=0x88;//帧头0x88
send_buf[1]=fun;//命令帧FUN
send_buf[2]=len;//数据长度帧LEN
for(i=0;i<len;i++)
send_buf[i+3]=data[i];
for(i=0;i<len+3;i++)
send_buf[len+3] += send_buf[i];//计算数据校验位SUM
for(i=0;i<len+4;i++)
usart1_send_char(send_buf[i]);//发送数据到串口1
/** 自定义帧0xA1
* 功能:发送加速度传感器和陀螺仪传感器数据给匿名上位机(V2.6)
* 入口参数:aacx,aacy,aacz:xyz三个方向的加速度值
* gyrox,gyroy,gyroz:xyz三个方向的陀螺仪值
* 返回值:无
* 注:数据格式:0x88+FUN+LEN+DATA+SUM
*/
void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
u8 buf[12];
buf[0]=(aacx>>8)&0xFF;
buf[1]=aacx&0xFF;
buf[2]=(aacy>>8)&0xFF;
buf[3]=aacy&0xFF;
buf[4]=(aacz>>8)&0xFF;
buf[5]=aacz&0xFF;
buf[6]=(gyrox>>8)&0xFF;
buf[7]=gyrox&0xFF;
buf[8]=(gyroy>>8)&0xFF;
buf[9]=gyroy&0xFF;
buf[10]=(gyroz>>8)&0xFF;
buf[11]=gyroz&0xFF;
usart1_niming_report(0xA1,buf,12);
/** 飞控显示帧
* 功能:上报解算后的姿态数据给上位机
* 入口参数:aacx,aacy,aacz:xyz三个方向的加速度值
* gyrox,gyroy,gyroz:xyz三个方向的陀螺仪值
* yaw,偏航角,单位为0.1度 0 -> 3600 对应 0 -> 360.0度
* roll,横滚角,单位0.01度。 -18000 -> 18000 对应 -180.00 -> 180.00度
* pitch,俯仰角,单位 0.01度。-9000 - 9000 对应 -90.00 -> 90.00 度
* 返回值:无
* 注:数据格式:0x88+0xAF+0x1C+ ACC DATA + GYRO DATA + MAG DATA + ANGLE DATA(roll/pitch/yaw) +0x00+0x00+0x00+0x00+SUM
* ANGLE的roll和pitch数据为实际值乘以100以后得到的整数值,yaw为乘以10以后得到的整数值
*/
void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
u8 buf[28]=0x00;
buf[0]=(aacx>>8)&0xFF;
buf[1]=aacx&0xFF;
buf[2]=(aacy>>8)&0xFF;
buf[3]=aacy&0xFF;
buf[4]=(aacz>>8)&0xFF;
buf[5]=aacz&0xFF;
buf[6]=(gyrox>>8)&0xFF;
buf[7]=gyrox&0xFF;
buf[8]=(gyroy>>8)&0xFF;
buf[9]=gyroy&0xFF;
buf[10]=(gyroz>>8)&0xFF;
buf[11]=gyroz&0xFF;
//12-17为磁力计,MPU6050没有磁力计,发送0x00
buf[18]=(roll>>8)&0xFF;
buf[19]=roll&0xFF;
buf[20]=(pitch>>8)&0xFF;
buf[21]=pitch&0xFF;
buf[22]=(yaw>>8)&0xFF;
buf[23]=yaw&0xFF;
//24-27为数据格式中的0x00
usart1_niming_report(0xAF,buf,28);
/**
* 功能:发送PID数据给上位机
* 入口参数:rol_p,rol_i,rol_d,pit_p,pit_i,pit_d,yaw_p,yaw_i,yaw_d
* 返回值:无
* 格式为:0X88 0XAC 0X1C 0XAD + PID数据 + 无用数据 + SUM
*/
void usart1_report_pid(u16 rol_p,u16 rol_i,u16 rol_d,u16 pit_p,u16 pit_i,u16 pit_d,u16 yaw_p,u16 yaw_i,u16 yaw_d)
u8 buf[28]=0x00;
buf[0]=0xAD;
buf[1]=(rol_p>>8)&0xFF;
buf[2]=rol_p&0xFF;
buf[3]=(rol_i>>8)&0xFF;
buf[4]=rol_i&0xFF;
buf[5]=(rol_d>>8)&0xFF;
buf[6]=rol_d&0xFF;
buf[7]=(pit_p>>8)&0xFF;
buf[8]=pit_p&0xFF;
buf[9]=(pit_i>>8)&0xFF;
buf[10]=pit_i&0xFF;
buf[11]=(pit_d>>8)&0xFF;
buf[12]=pit_d&0xFF;
buf[13]=(yaw_p>>8)&0xFF;
buf[14]=yaw_p&0xFF;
buf[15]=(yaw_i>>8)&0xFF;
buf[16]=yaw_i&0xFF;
buf[17]=(yaw_d>>8)&0xFF;
buf[18]=yaw_d&0xFF;
usart1_niming_report(0xAC,buf,28);
/**
* 功能:遥控,电机pwm,电压显示
* 入口参数:throt,yaw,roll,pitch,aux1,aux2,aux3,aux4,aux5,pwm1,pwm2,pwm3,pwm4,vol(电压)
* 返回值:无
* 帧格式:0x88+0xAE+0x12+THROT YAW ROLL PITCH AUX1 2 3 4 5 PWM:1 2 3 4 VOLTAGE+SUM
遥控数据最小在1000左右,最大在2000左右。数据都为uint16格式,
其中pwm范围1-100,voltage为实际值*100。
*/
void usart1_report_rc(short thort,short yaw,short roll,short pitch,
short aux1,short aux2,short aux3,short aux4,short aux5,
short pwm1,short pwm2,short pwm3,short pwm4,
short vol)
u8 buf[28]=0x00;
//THROT YAW ROLL PITCH
buf[0]=(thort>>8)&0xFF;//
buf[1]=thort&0xFF;//
buf[2]=(yaw>>8)&0xFF;//
buf[3]=yaw&0xFF;//
buf[4]=(roll>>8)&0xFF;//
buf[5]=roll&0xFF; //
buf[6]=(pitch>>8)&0xFF;//
buf[7]=pitch&0xFF;//
//AUX1 2 3 4 5
buf[8]=(aux1>>8)&0xFF;
buf[9]=aux1&0xFF;
buf[10]=(aux2>>8)&0xFF;
buf[11]=aux2&0xFF;
buf[12]=(aux3>>8)&0xFF;
buf[13]=aux3&0xFF;
buf[14]=(aux4>>8)&0xFF;
buf[15]=aux4&0xFF;
buf[16]=(aux5>>8)&0xFF;
buf[17]=aux5&0xFF;
//PWM:1 2 3 4
buf[18]=(pwm1>>8)&0xFF;
buf[19]=pwm1&0xFF;
buf[20]=(pwm2>>8)&0xFF;
buf[21]=pwm2&0xFF;
buf[22]=(pwm3>>8)&0xFF;
buf[23]=pwm3&0xFF;
buf[24]=(pwm4>>8)&0xFF;
buf[25]=pwm4&0xFF;
//VOLTAGE
buf[26]=(vol>>8)&0xFF;
buf[27]=vol&0xFF;
usart1_niming_report(0xAE,buf,28);
/**
* 功能:发送offset给上位机
* 入口参数:acc_x,acc_y,acc_z,gyro_x,gyro_y,gyro_z
* 返回值:无
* 格式为:0X88 0XAC 0X1C 0XAC + 传感器零偏数据ACC XYZ GYRO XYZ+无用数据+SUM
*/
void usart1_report_offset(short acc_x,short acc_y,short acc_z,short gyro_x,short gyro_y,short gyro_z)
u8 buf[28]=0x00;
buf[0]=0xAC;
buf[1]=(acc_x>>8)&0xFF;
buf[2]=acc_x&0xFF;
buf[3]=(acc_y>>8)&0xFF;
buf[4]=acc_y&0xFF;
buf[5]=(acc_z>>8)&0xFF;
buf[6]=acc_z&0xFF;
buf[7]=(gyro_x>>8)&0xFF;
buf[8]=gyro_x&0xFF;
buf[9]=(gyro_y>>8)&0xFF;
buf[10]=gyro_y&0xFF;
buf[11]=(gyro_z>>8)&0xFF以上是关于STM32CubeMX配置工程移植dmp库配合匿名四轴上位机三维动态显示测试的主要内容,如果未能解决你的问题,请参考以下文章