100天精通智能网联汽车技术(基础篇)— Day1:自动驾驶技术概述
Posted Coisini_景尧
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了100天精通智能网联汽车技术(基础篇)— Day1:自动驾驶技术概述相关的知识,希望对你有一定的参考价值。
一、SAE自动驾驶分级标准:
二、SAE自动驾驶分级标准:
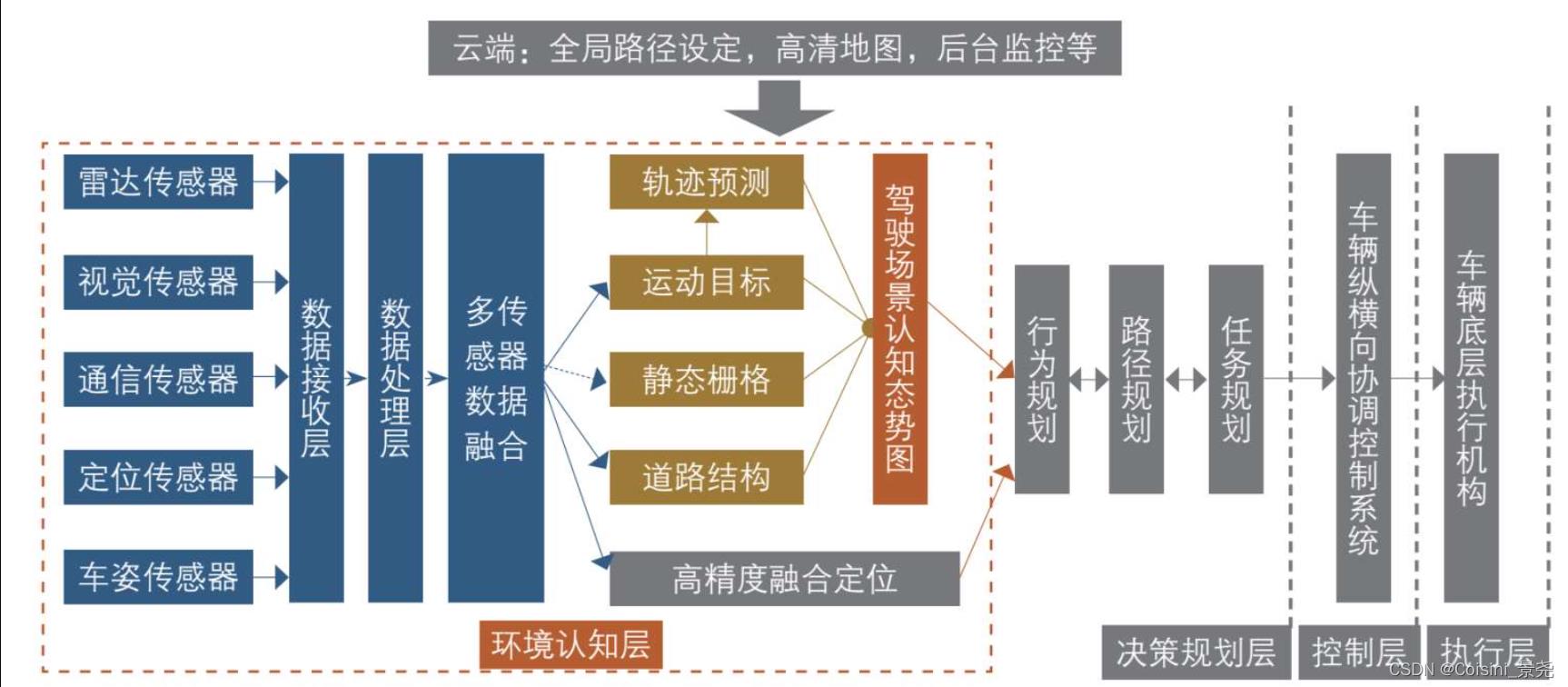
三、自动驾驶汽车的软硬件架构:
1、环境感知(认知)层:
-
激光雷达,毫米波雷达,超声波雷达,摄像头,夜视系统 —— 车道线检测,红绿灯/交通标识牌识别,行人/车辆/障碍物检测。
- ps:环境感知需要通过传感器获取大量的周围环境信息,才能保障后续做出相应的规划和决策,
-
GPS,陀螺仪 —— 车辆定位。
- ps:精准定位技术是获取自动驾驶车辆相对于外接环境的精确位置,目前自动驾驶要求的定位精度误差不超过10cm,GPS传感器仅有米级且容易受到隧道遮挡,信号延迟等因素干扰。 目前应对的方法是:融合GNSS全球导航卫星,摄像头,IMU惯性导航和轮速传感器等,通过各传感器之间的相互校准和数据融合来实现精确到车道线的全球实时定位。
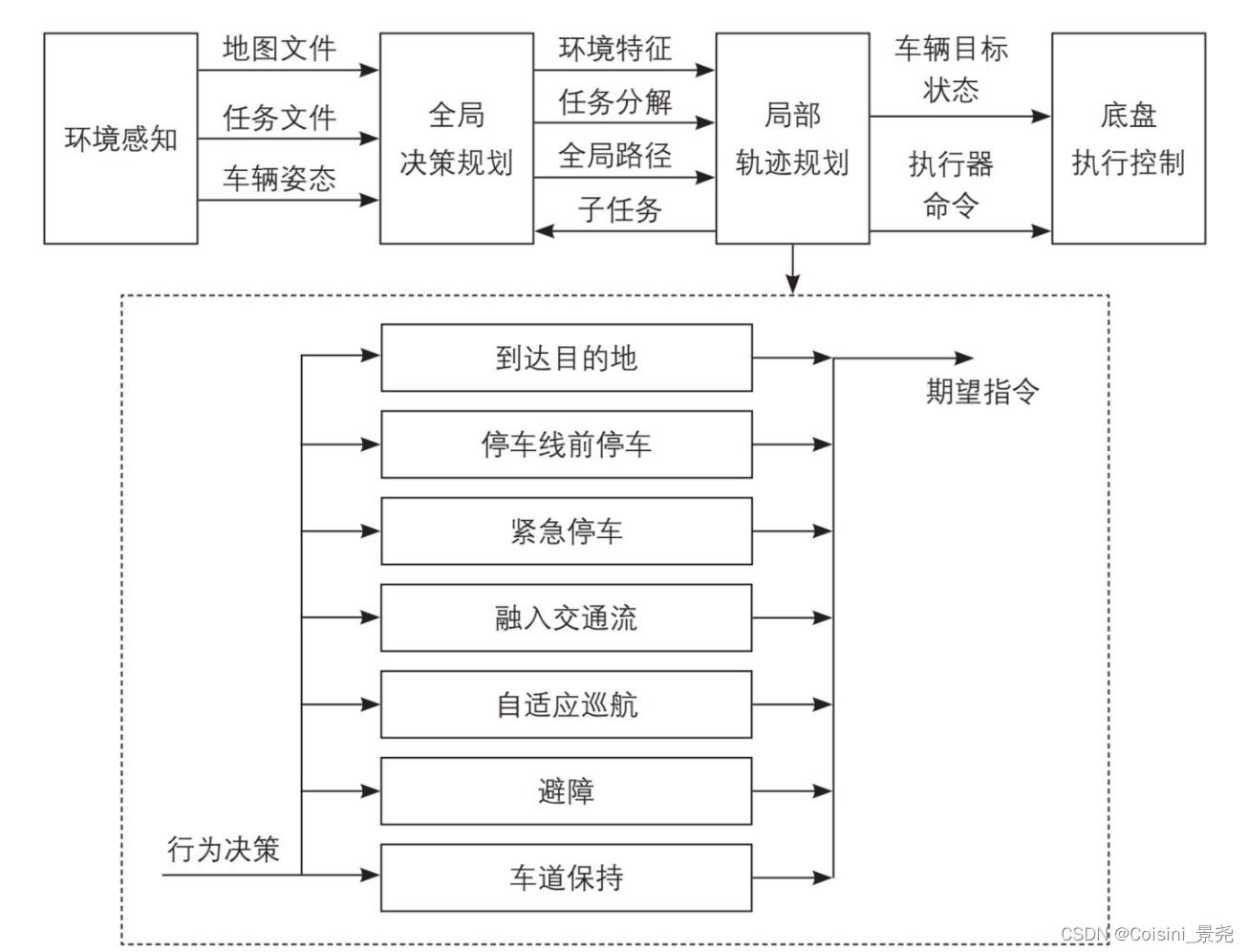
2、决策规划层:
- 任务规划 —— 车道保持,换道,跟车,超车,避险避撞等。
- 行为规划 —— 加速,减速,转弯,制动等。
- 路径规划 —— 行驶轨迹
-
ps:决策规划中,首先融合多传感器信息,根据驾驶需求进行任务决策,通过特定的约束条件,规划出两点之间多条可以选择的安全路径,最终选择一条最优的路径,作为车辆行驶轨迹。
-
划分层面分为:
- 全局规划:根据获取的地图信息,规划出一条在特定条件之下的无碰撞最优路径。
- 局部规划:根据全局规划 + 局部环境信息 → 到达目标点
-
决策规划体系结构:
- 分层递进式(串联):上一个模块输出 → 下一个模块输入 → …

- 反应式(并联):控制层都可以直接基于传感器的输入进行决策,因此所产生的动作就是传感数据直接作用的结果,可以突出感知动作的特点,更适用于陌生的环境。
 - 分层递进式 + 反应式(混合式体系结构)
- 分层递进式 + 反应式(混合式体系结构)
- 分层递进式(串联):上一个模块输出 → 下一个模块输入 → …
-
3、控制层:
- 纵向控制 —— 车辆的驱动和制动控制
- 横向控制 —— 车辆的转向盘角度调整和轮胎力的控制
4、执行层:
- 通过电机驱动,发动机,传动和制动等系统来执行。
- ps:控制层及执行层则基于车辆动力学系统模型对车辆驱动,制动,转向等进行控制,使车辆跟随所制定的行驶轨迹。
- ps:控制层及执行层则基于车辆动力学系统模型对车辆驱动,制动,转向等进行控制,使车辆跟随所制定的行驶轨迹。
二、人工智能技术及大数据应用
1、概述:
- 自动驾驶使一个集环境感知,规划决策,控制等功能一体的综合系统。
2、自动驾驶技术环节:
- 感知系统:获取交通状况及行驶环境信息
- 数据处理:针对传感器手机的数据和信息,进行分析处理
- 决策规划:进行决策选择最优的道路轨迹
- 控制系统:执行控制信号进行具体操作,依据ECU输出的信号,让汽车完成动作执行。
- ps:人工智能算法通过深度学习,利用已有的知识和驾驶经验进行决策和规划,控制,最终实现无人驾驶
-----未完待续,感谢关注,谢谢-------------
以上是关于100天精通智能网联汽车技术(基础篇)— Day1:自动驾驶技术概述的主要内容,如果未能解决你的问题,请参考以下文章