(IROS 2022) 基于事件相机的单目视觉惯性里程计 / Event-based Monocular Visual Inertial Odometry
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了(IROS 2022) 基于事件相机的单目视觉惯性里程计 / Event-based Monocular Visual Inertial Odometry相关的知识,希望对你有一定的参考价值。
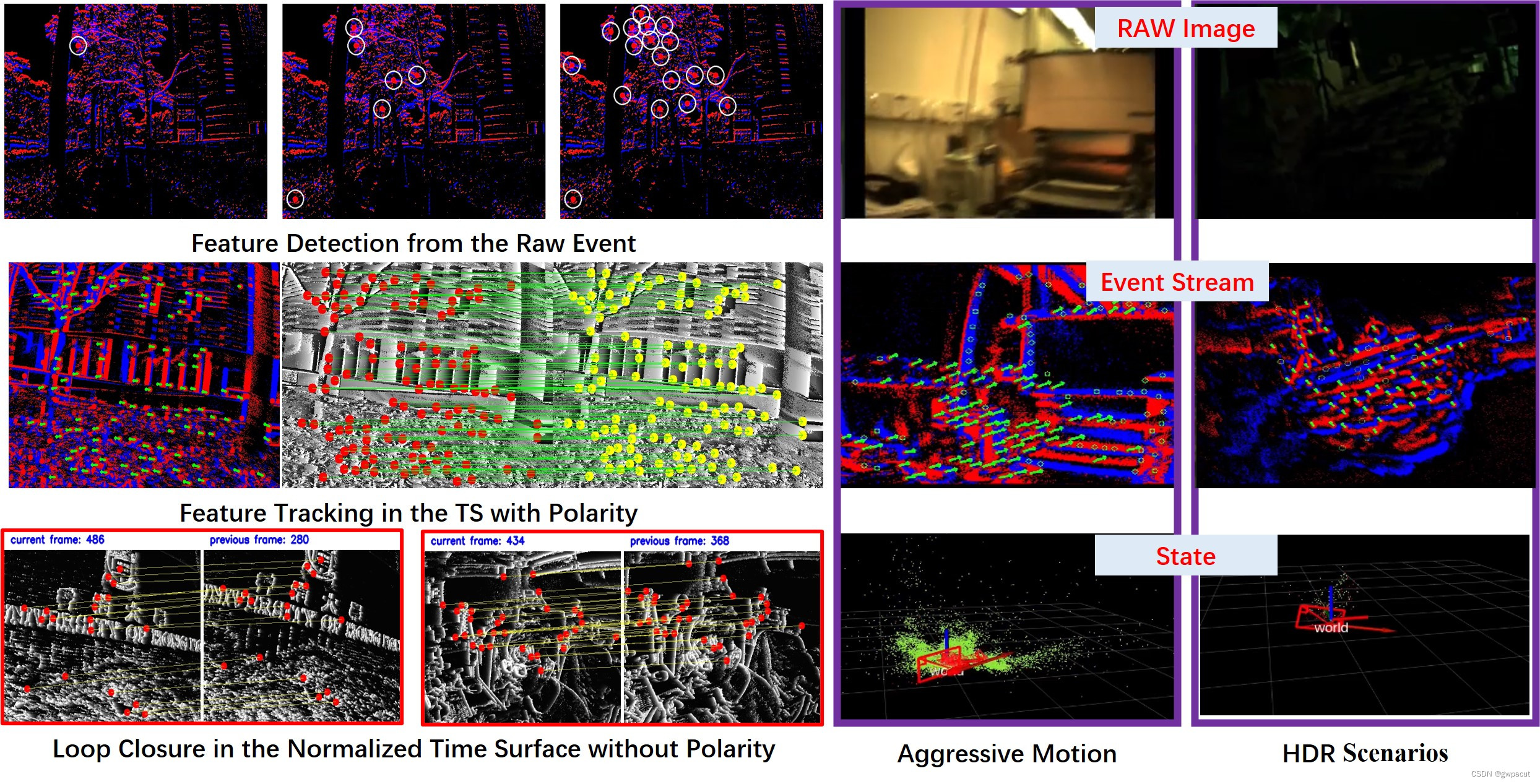
本博文介绍一下本团队最近的工作《Monocular Event Visual Inertial Odometry based on Event-corner using Sliding Windows Graph-based Optimization》
Project Website:GitHub - arclab-hku/Event_based_VO-VIO-SLAM: Our Works in Event-based VO/VIO/SLAM
数据集以及项目网站可见:https://sites.google.com/connect.hku.hk/hku-arclab-evio/home
本论文提出一种基于事件相机的单目视觉惯性里程计(EVIO),在特殊环境下(如:快速运动、光线变化剧烈的环境)仍然可以实现高精度、鲁棒的状态估计。
下面把展示的demo列出来
原理介绍
简短demo演示
在公开数据集上的效果
以上是关于(IROS 2022) 基于事件相机的单目视觉惯性里程计 / Event-based Monocular Visual Inertial Odometry的主要内容,如果未能解决你的问题,请参考以下文章