手势识别基于matlab肤色静态手势识别含Matlab源码 288期
Posted 海神之光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了手势识别基于matlab肤色静态手势识别含Matlab源码 288期相关的知识,希望对你有一定的参考价值。
⛄一、手势识别简介(附课程作业报告)
1 系统设计方案
今年来,手势识别作为新一代人机交互手段,受到了国内外研究学者以及公司的关注和研究,并且取得了突出的成果,在智能电视、游戏娱乐设备、机器人等方面都有了广泛的应用,而且,通过对手势识别技术的研究,可以推动机器设备对视觉感知能力的认识,并将其应用到更多的人工智能领域,使机器设备更好的理解人类的想法和意图,为我们的生活和工作带来更大的好处。本文实现了一种能识别五种手势的手势识别系统,可以完成人机交互的基本任务。
手势动作可以分为两种,一种是相对不动,没有任何附加动作的静态手势动作,另一种是相对运动、伴随着复杂变化(如缠绕、组合等)动态手势动作,前者突出表示形式及状态,后者突出变化及轨迹。本文主要针对第一种进行研究,系统处理流程如图1所示。

图1 系统结构流程图
2 系统验收需要达到的目标和测试水平
本系统可以对五种预定义的静态手势进行识别,如图2所示。
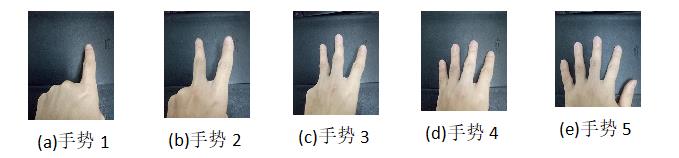
图2 五种预定义的静态手势
当系统输入以上任意一种手势时,系统能够准确迅速的做出判断当前输入的手势是属于哪一种,并且在控制台打印出相应信息。例如输入图片(a)时,系统在控制台输出手势1;输入图片(b)时,系统在控制台输出手势2,…。
3 系统实现框图和流程图
3.1手势分割
本文选择在YcbCr颜色空间进行手势分割处理,分割的重点在于建立肤色模型,利用手势皮肤颜色在YcbCr空间内满足聚类的特点,设定阈值范围,对图像进行扫描,在此范围内则认定为手势,不在此范围内的则不予考虑,查阅相关资料并进行试验发现,人手颜色在YcbCr的二维子空间(Cb,Cr)上的分布范围满足:Cb[133,173]&Cr[77,127],当像素点满足此条件就认定为手势,此方法处理简单。手势分割流程图如图3所示:
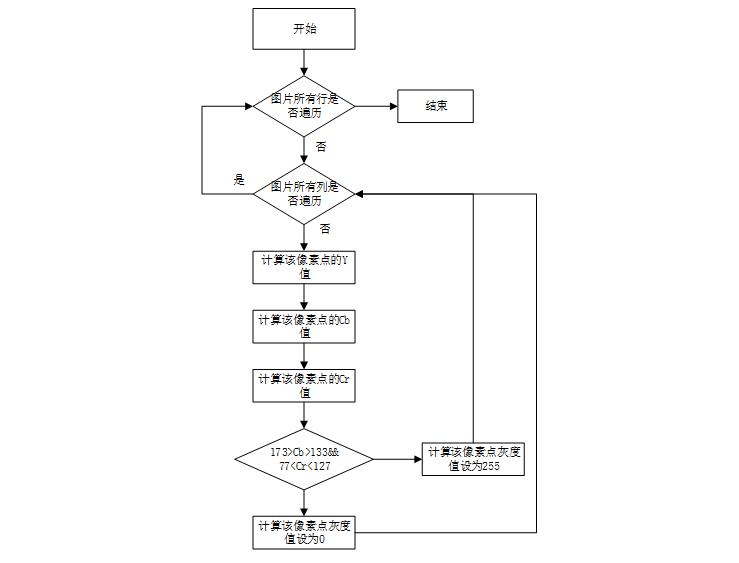
图3 手势分割流程图
⛄二、部分源代码
close all;clear all;
clc;
%----------------------------------------------
%图像进行中值滤波,并显示图像
%调用 median_filter( ) 进行处理
%----------------------------------------------
area = int32(0) ;%面积
perimeter = int32(0) ;%周长
%读进图像
[filename, pathname] = uigetfile( ‘.bmp’;'.jpg’; ‘*.gif’, ‘选择图片’);
RGB_data = imread([pathname, filename]);
[ROW,COL, DIM] = size(RGB_data); %提取图片的行列数
R_data = single(RGB_data(:,:,1));
G_data = single(RGB_data(:,:,2));
B_data = single(RGB_data(:,:,3));
% %以下是中值滤波代码
% medfil_result_R = median_filter(R_data, 3);
% medfil_result_G = median_filter(G_data, 3);
% medfil_result_B = median_filter(B_data, 3);
%以下是建立肤色模型,实现RGB转YCbCr
Y_data = int32(zeros(ROW,COL));
Cb_data = int32(zeros(ROW,COL));
Cr_data = int32(zeros(ROW,COL));
for r = 1:ROW
for c = 1:COL
% Y_data(r, c) = 0.299medfil_result_R(r, c) + 0.587medfil_result_G(r, c) + 0.114medfil_result_B(r, c);
% Cb_data(r, c) = -0.1687medfil_result_R(r, c) - 0.3313medfil_result_G(r, c) + 0.5medfil_result_B(r, c) + 128;
% Cr_data(r, c) = 0.5medfil_result_R(r, c) - 0.4187medfil_result_G(r, c) - 0.0813medfil_result_B(r, c) + 128;
%系数进行8位量化处理
% Y_data(r, c) = int32((76R_data(r, c) + 150G_data(r, c) + 29B_data(r, c))/256);
% Cb_data(r, c) = int32((-43R_data(r, c) - 84G_data(r, c) + 128B_data(r, c) + 128256)/256);
% Cr_data(r, c) = int32((128R_data(r, c) - 107G_data(r, c) - 20B_data(r, c) + 128256)/256);
Y_data(r, c) = floor( (76R_data(r, c) + 150G_data(r, c) + 29B_data(r, c))/256 );
Cb_data(r, c) = floor( (-43R_data(r, c) - 84G_data(r, c) + 128B_data(r, c) + 128256)/256 );
Cr_data(r, c) = floor( (128R_data(r, c) - 107G_data(r, c) - 20B_data(r, c) + 128*256)/256 );
end
end
%以下是二值化及统计手势面积
Gray_data = int32(zeros(ROW,COL));
for r = 1:ROW
for c = 1:COL
if Cb_data(r, c)>133 && Cb_data(r, c)<173 && Cr_data(r, c)>77 && Cr_data(r, c)<127
Gray_data(r,c) = 0 ;
area = area + 1 ;
else
Gray_data(r,c) = 255 ;
end
end
end
%以下是边缘检测
%edge_data=edge(Gray_data,‘sobel’) ;
edge_data = Sobel_Image(Gray_data) ;
% %以下是统计周长
% for r = 1:ROW
% for c = 1:COL
% if edge_data(r, c)==1
% perimeter = perimeter + 1 ;
% end
% end
% end
[H1,H2,H3,perimeter] = OriginMoment(edge_data) ;
function [ img ] = median_filter( image, m )
%----------------------------------------------
%中值滤波
%输入:
%image:原图
%m:模板的大小3*3的模板,m=3
%输出:
%img:中值滤波处理后的图像
%----------------------------------------------
n = m;
[ height, width ] = size(image);
x1 = int32(image);
x2 = x1;
for i = 1: height-n+1
for j = 1:width-n+1
mb = x1( i:(i+n-1), j:(j+n-1) );
mb = mb(😃;
mm = median(mb);
x2( i+(n-1)/2, j+(n-1)/2 ) = mm;
end
end
img = x2;
end
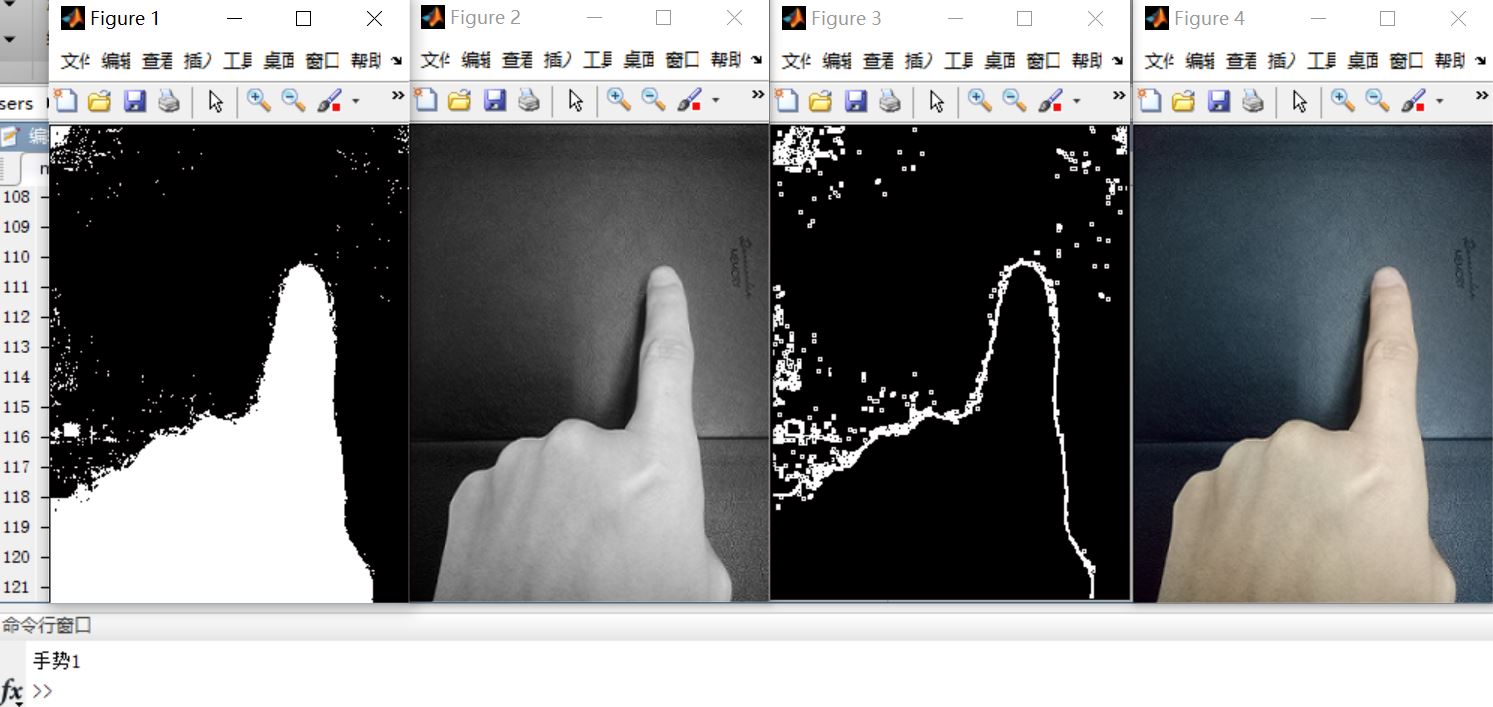
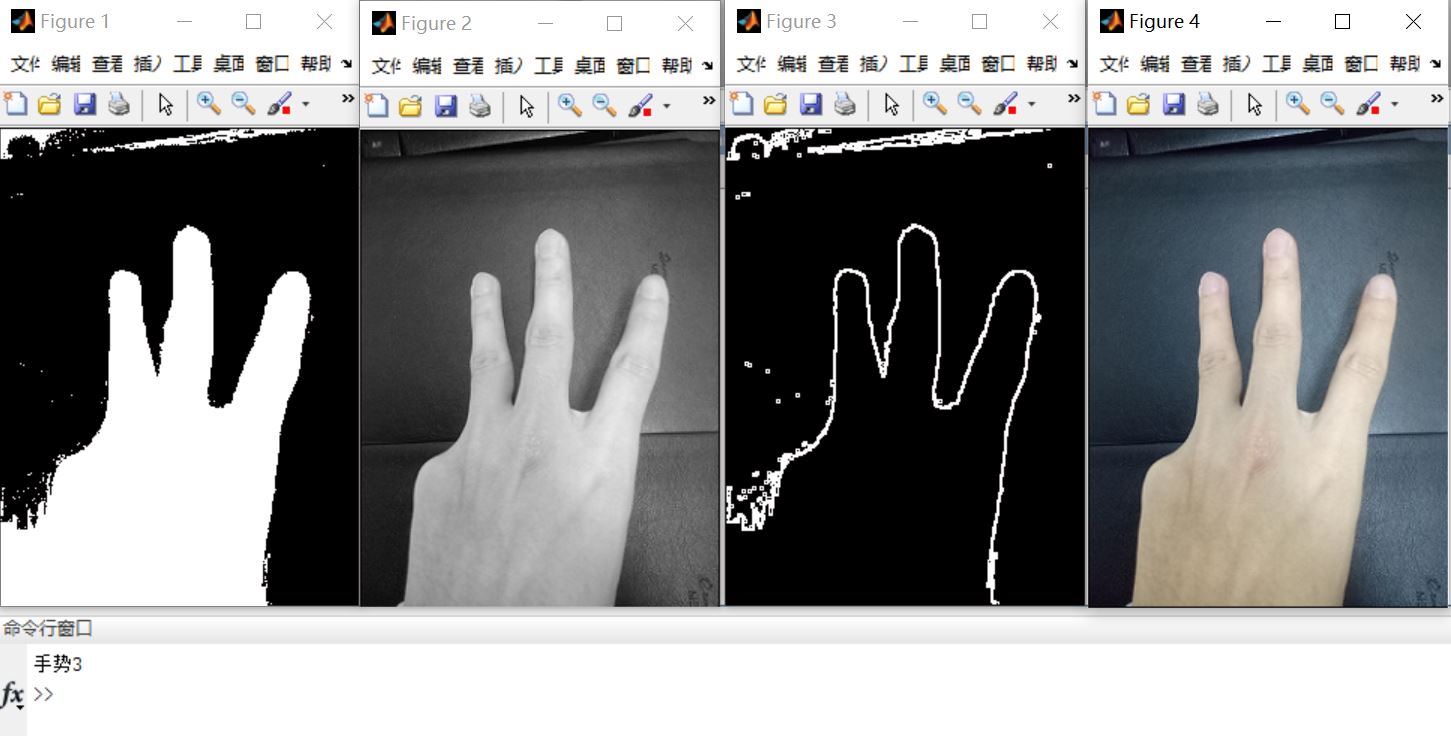
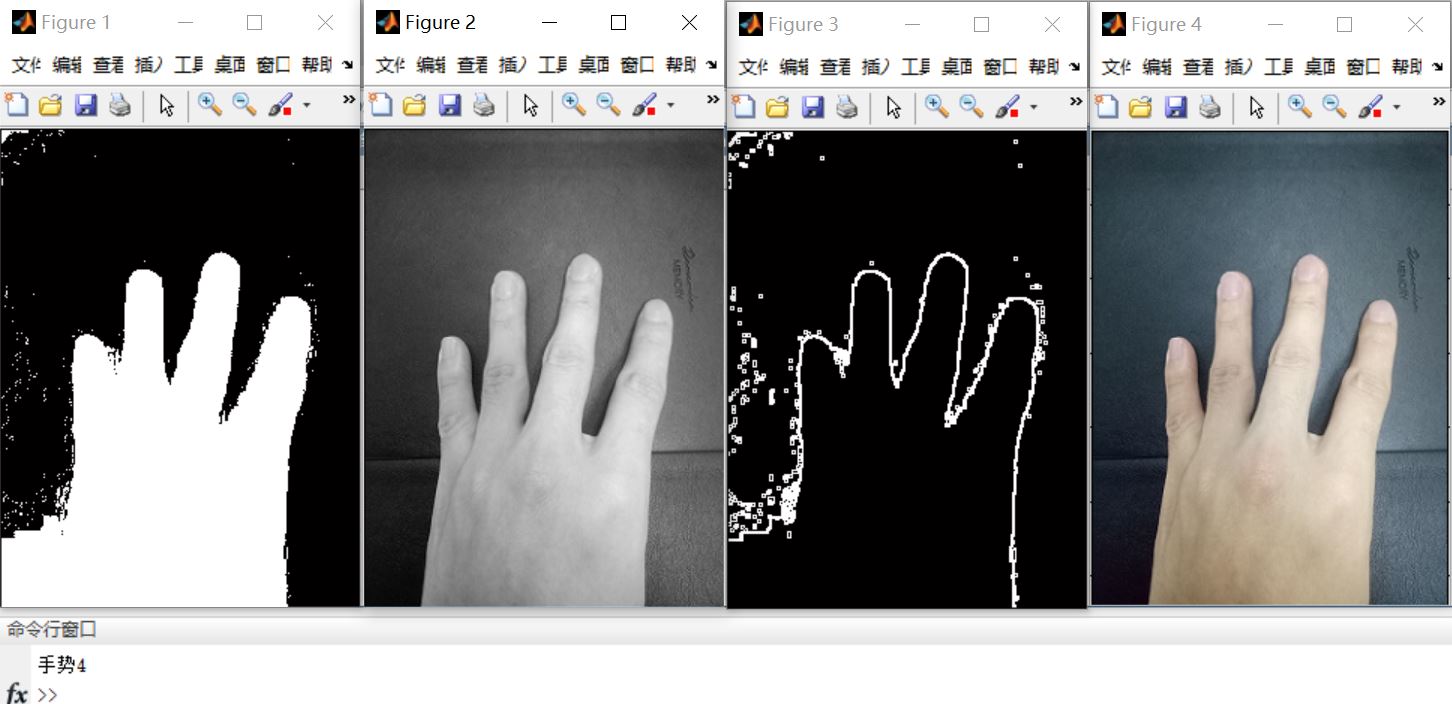
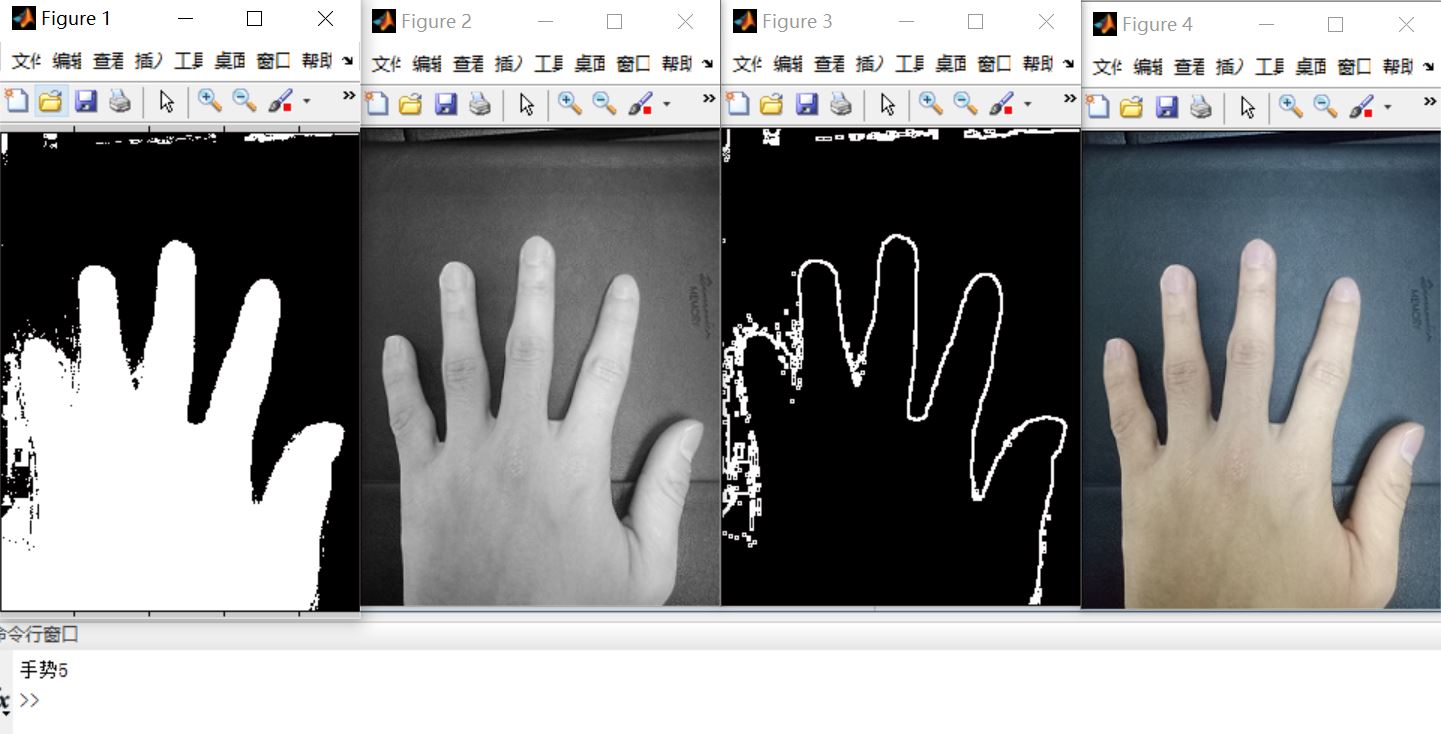
⛄三、运行结果

⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]李昌锋,郭生挺,陈文婷.基于静态手势识别的视力检测系统设计[J].科技创新与应用. 2021,11(13)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
以上是关于手势识别基于matlab肤色静态手势识别含Matlab源码 288期的主要内容,如果未能解决你的问题,请参考以下文章