优化器算法optimizer
Posted AI蜗牛之家
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了优化器算法optimizer相关的知识,希望对你有一定的参考价值。
文章目录
其实本来是没有想写关于optimizer的,因为网上的一搜一大把,但是我发现好多文章都讲的乱七八糟,可能可能知道相关概念的人来看就比较顺畅,但是对于小白或者是之前接触比较少的人来说,就比较费劲,我这里也是作为自己的笔记,重新梳理一下,多数资料也是来源于之前的大牛blog,最后会有相关参考链接
1.相关背景
1.1.指数加权移动平均(Exponential Weighted Moving Average)
1.1.1.演化与概述
算术平均(权重相等)—>加权平均(权重不等)—>移动平均(大约是只取最近的 N 次数据进行计算)—> 批量归一化(BN)及各种优化算法的基础
EMA:是以指数式递减加权的移动平均,各数值的加权影响力随时间呈指数式递减,时间越靠近当前时刻的数据加权影响力越大

1.1.2.公式理解
- v t = β v t − 1 + ( 1 − β ) θ t v_t = \\beta v_t-1 + (1 - \\beta)\\theta_t vt=βvt−1+(1−β)θt,公式中 θ t \\theta_t θt 为 t 时刻的实际温度;系数 \\beta 表示加权下降的快慢,值越小权重下降的越快; v t v_t vt 为 t 时刻 EMA 的值。
- 当 v 0 = 0 v_0 = 0 v0=0 时,可得: v t = ( 1 − β ) ( θ t + β θ t − 1 + β 2 θ t − 2 + . . . + β t − 1 θ 1 ) v_t = (1-\\beta) (\\theta_t+\\beta\\theta_t-1+\\beta^2\\theta_t-2+ ... +\\beta^t-1\\theta_1) vt=(1−β)(θt+βθt−1+β2θt−2+...+βt−1θ1),从公式中可以看到:每天温度( θ \\theta θ)的权重系数以指数等比形式缩小,时间越靠近当前时刻的数据加权影响力越大。
- 在优化算法中,我们一般取 β > = 0.9 \\beta >= 0.9 β>=0.9,而 1 + β + β 2 + . . . + β t − 1 = 1 − β t 1 − β 1 + \\beta + \\beta^2 + ... + \\beta^t-1 = \\frac1-\\beta^t1-\\beta 1+β+β2+...+βt−1=1−β1−βt,所以当 t 足够大时 β t ≈ 0 \\beta^t \\approx 0 βt≈0,此时便是严格意义上的指数加权移动平均。
- 在优化算法中,我们一般取 β > = 0.9 \\beta >= 0.9 β>=0.9,此时有 β 1 1 − β ≈ 1 e ≈ 0.36 \\beta^\\frac11-\\beta \\approx \\frac1e \\approx 0.36 β1−β1≈e1≈0.36,也就是说 N = 1 1 − β N = \\frac11-\\beta N=1−β1 天后,曲线的高度下降到了约原来的 1 3 \\frac13 31,由于时间越往前推移 θ \\theta θ 权重越来越小,所以相当于说:我们每次只考虑最近(latest) N = 1 1 − β N = \\frac11-\\beta N=1−β1 天的数据来计算当前时刻的 EMA,这也就是移动平均的来源。
1.1.3.EMA 偏差修正
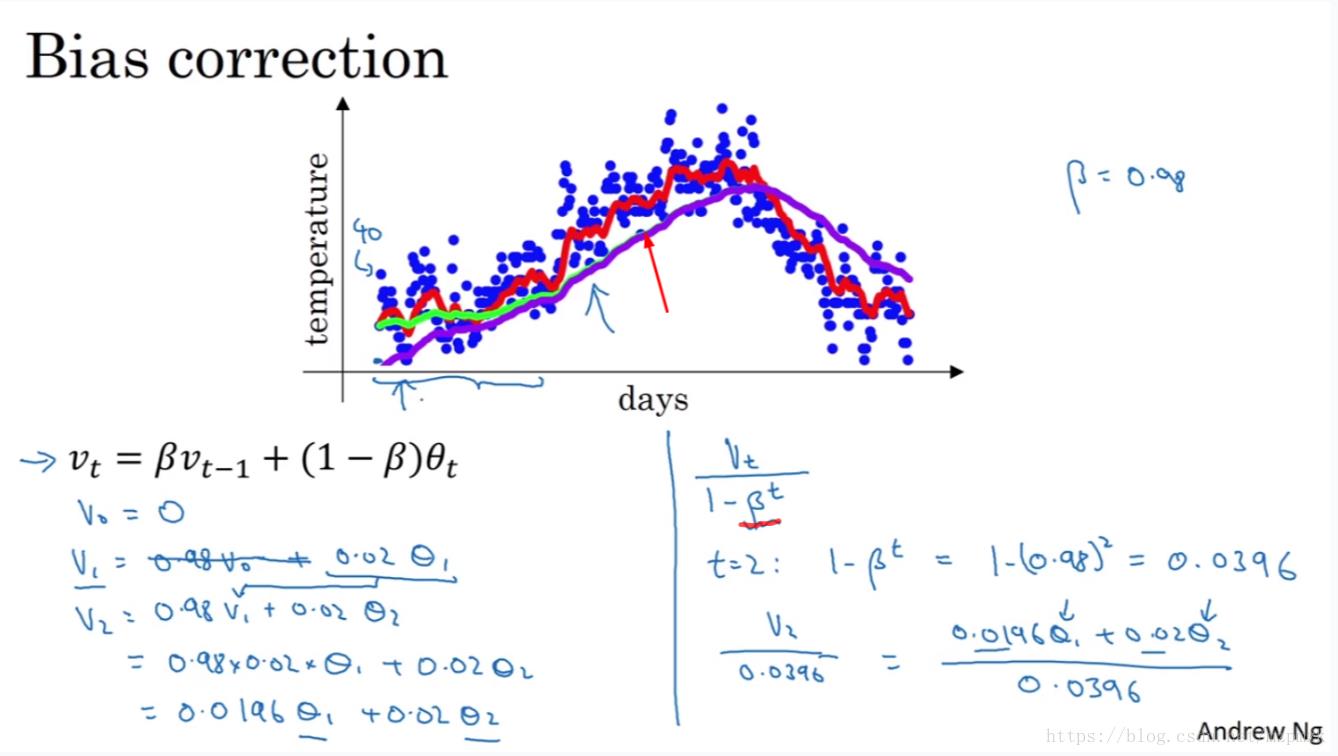
在
β
\\beta
β = 0.98 时,理想状况下,我们应该能得到绿色曲线,然而现实我们得到的却是紫色曲线,它的起点比真实的要低很多,不能很好的估计起始位置的温度,此问题称为:冷启动问题,这是由于
v
0
v_0
v0 = 0 造成的。
解决方案:将所有时刻的 EMA 除以
1
−
β
t
1 - \\beta^t
1−βt 后作为修正后的 EMA。当 t 很小时,这种做法可以在起始阶段的估计更加准确;当 t 很大时,偏差修正几乎没有作用,所以对原来的式子几乎没有影响。注意:我们一般取
β
>
=
0.9
\\beta >= 0.9
β>=0.9,计算 t 时刻偏修正后的 EMA 时,用的还是 t-1 时刻修正前的EMA。
1.1.4.EMA 在 Momentum 优化算法中应用的理解
假设每次梯度的值都是 g、
γ
=
0.95
\\gamma = 0.95
γ=0.95 ,此时参数更新幅度会加速下降,当 n 达到 150 左右,此时达到了速度上限,之后将匀速下降(可参考一中的公式理解)。
假如,在某个时间段内一些参数的梯度方向与之前的不一致时,那么真实的参数更新幅度会变小;相反,若在某个时间段内的参数的梯度方向都一致,那么其真实的参数更新幅度会变大,起到加速收敛的作用。在迭代后期,由于随机噪声问题,经常会在收敛值附近震荡,动量法会起到减速作用,增加稳定性。
2.递归下降算法
2.1.BGD MBGD SGD
具体可参考之前的文章
或者这个参考链接:
深度学习——优化器算法Optimizer详解(BGD、SGD、MBGD、Momentum、NAG、Adagrad、Adadelta、RMSprop、Adam)
近期的的研究表明,深层神经网络之所以比较难训练,并不是因为容易进入local minimum。相反,由于网络结构非常复杂,在绝大多数情况下即使是 local minimum 也可以得到非常好的结果。而之所以难训练是因为学习过程容易陷入到马鞍面中,即在坡面上,一部分点是上升的,一部分点是下降的。而这种情况比较容易出现在平坦区域,在这种区域中,所有方向的梯度值都几乎是 0。
2.2.Momentum
动量方法旨在加速学习,特别是在面对小而连续的梯度但是含有很多噪声的时候。动量模拟了物体运动时的惯性,即在更新的时候在一定程度上会考虑之前更新的方向,同时利用当前batch的梯度微调最终的结果。这样则可以在一定程度上增加稳定性,从而更快的学习。
公式:
m
t
=
μ
∗
m
t
−
1
+
g
t
Δ
θ
t
=
−
η
∗
m
t
m_t = \\mu * m_t-1 +g_t \\\\\\Delta \\theta_t = -\\eta *m_t
mt=μ∗mt−1+gtΔθt=−η∗mt
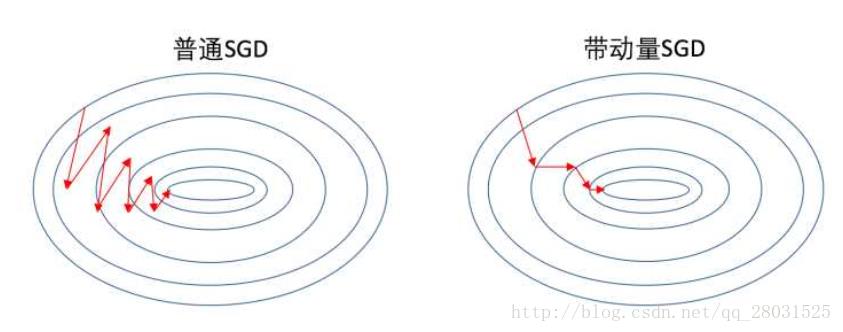
加入的这一项,可以使得梯度方向不变的维度上速度变快,梯度方向有所改变的维度上的更新速度变慢,这样就可以加快收敛并减小震荡。
超参数设定值: 一般 γ 取值 0.9 左右。
优点:
- 下降初期时,使用上一次参数更新,当下降方向一致时能够加速学习
- 下降中后期,在局部最小值附近来回振荡时,gradient–>0,使得更新幅度增大,跳出陷阱;
- 在梯度改变方向时,能减少更新。总体而言,momentum能够在相关方向上加速学习,抑制振荡,从而加速收敛
缺点:
- 这种情况相当于小球从山上滚下来时是在盲目地沿着坡滚,如果它能具备一些先知,例如快要上坡时,就知道需要减速了的话,适应性会更好。
2.3.Nesterov Accelerated Gradient
可以看到,此前积累的动量
m
t
−
1
m_t−1
mt−1并没有直接改变当前梯度
g
t
g_t
gt,所以Nesterov的改进就是让之前的动量直接影响当前的动量,即:
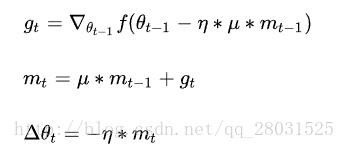
所以,加上Nesterov项后,梯度在大的跳跃后,进行计算对当前梯度进行校正。
Nesterov动量和标准动量的区别在于梯度的计算上。Nesterov动量的梯度计算是在施加当前速度之后。因此,Nesterov动量可以解释为往标准动量方法中添加了一个校正因子。
其实说白了就是当前位置在用上次的梯度先暂时更新一下
θ
\\theta
θ,然后再计算梯度,这样就能看到如果按照上次的梯度更新时的效果,相当于往前看了一步,这样再和之前动量结合,从而起了校正的作用
那到底为什么呢?从数学上看怎么校正的呢?看下面等效形式

这个NAG的等效形式与Momentum的区别在于,本次更新方向多加了一个
β
[
g
(
θ
i
−
1
)
−
g
(
θ
i
−
2
)
]
\\beta[g(\\theta_i-1) - g(\\theta_i-2)]
β[g(θi−1)−g(θi−2)],它的直观含义就很明显了:如果这次的梯度比上次的梯度变大了,那么有理由相信它会继续变大下去,那我就把预计要增大的部分提前加进来;如果相比上次变小了,也是类似的情况。这样的解释听起来好像和原本的解释一样玄,但是读者可能已经发现了,这个多加上去的项不就是在近似目标函数的二阶导嘛!所以NAG本质上是多考虑了目标函数的二阶导信息,怪不得可以加速收敛了!其实所谓“往前看”的说法,在牛顿法这样的二阶方法中也是经常提到的,比喻起来是说“往前看”,数学本质上则是利用了目标函数的二阶导信息。
其他相关参考:比Momentum更快:揭开Nesterov Accelerated Gradient的真面目
2.4 Adagrad
接下来的这几个都是自适应学习率的递归下降算法
在训练开始的时候,我们远离最终的最优值点,需要使用较大的学习率。经过几轮训练之后,我们需要减小训练学习率。
在采用mini-batch梯度下降时,迭代的过程中会伴随有噪音,虽然cost function会持续下降,但是算法收敛的结果是在最小值附近处摆动,而减小学习率,则会使得最后的值在最小值附近,更加接近收敛点。

Divide the learning rate of each parameter by the root mean square of its previous derivatives(将每个参数除以之前所有梯度的均方和)。 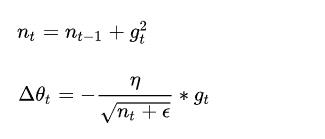
这里
n
t
n_t
nt是从t=1开始进行递推形成一个约束项regularizer(其实就是之前所有梯度的平方和),ε保证分母非0;
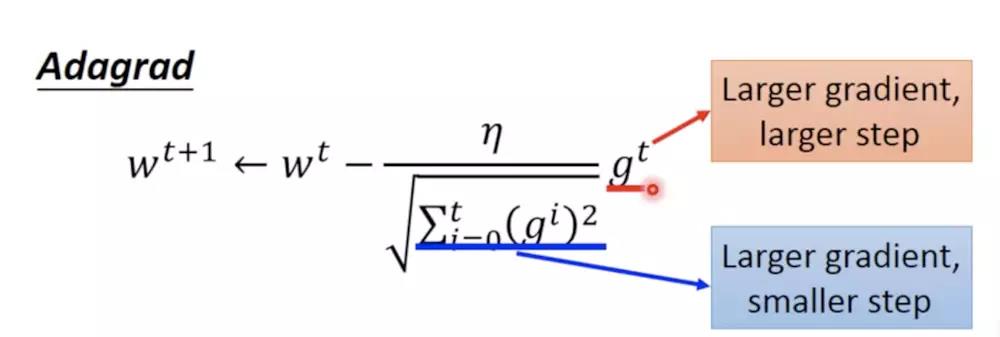
我们发现一个现象,本来应该是随着gradient的增大,我们的学习率是希望增大的,也就是图中的gt;但是与此同时随着gradient的增大,我们的分母是在逐渐增大,也就对整体学习率是减少的,这是为什么呢?
这是因为随着我们更新次数的增大,我们是希望我们的学习率越来越慢。因为我们认为在学习率的最初阶段,我们是距离损失函数最优解很远的,随着更新的次数的增多,我们认为越来越接近最优解,于是学习速率也随之变慢。
特点:
(1) 前期gtgt较小的时候,regularizer较大,能够放大梯度
(2) 后期gtgt较大的时候,regularizer较小,能够约束梯度
(3) 适合处理稀疏梯度。
缺点:
(1) 需要手动设置一个全局的学习率
(2) ηη设置过大时,会使regularizer过于敏感,对梯度的调节太大
(3) 中后期,分母上梯度平方的累积将会越来越大,使gradient–>0,使得训练提前结束
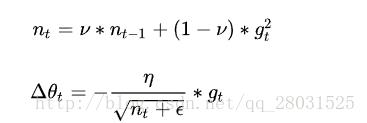
2.5.Adadelta
Adadelta是Adagrad的拓展,最初方案依旧是对学习率进行自适应约束,但是进行了计算上的简化。Adagrad会累加之前所有的梯度平方,而Adadelta只累加固定大小的项,并且也不直接存储这些项,仅仅是近似计算对应的平均值。即:
AdaDelta算法主要是为了解决AdaGrad算法中存在的缺陷,下面先介绍一下AdaGrad算法优点和以及存在的问题:
AdaGrad的迭代公式如下所示: 以上是关于优化器算法optimizer的主要内容,如果未能解决你的问题,请参考以下文章
Δ
x
t
=
η
∑
i
=
1
t
g