Apollo Advanced Lesson | Chapter6-1 ROS
Posted Justin-Yip
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Apollo Advanced Lesson | Chapter6-1 ROS相关的知识,希望对你有一定的参考价值。
Contents
–This article is excerpted from Baidu’s official about Apollo, please indicate the source for reprinting–
1. Why`s ROS ?

因为三个特性:
ROS Lesson 2
2. ROS的概念
-
松耦合
-
node
-
topic
-
roscore
-
msg
-
协作例子

ROS Lesson 3
Apollo ROS 介绍
Why optimize ROS
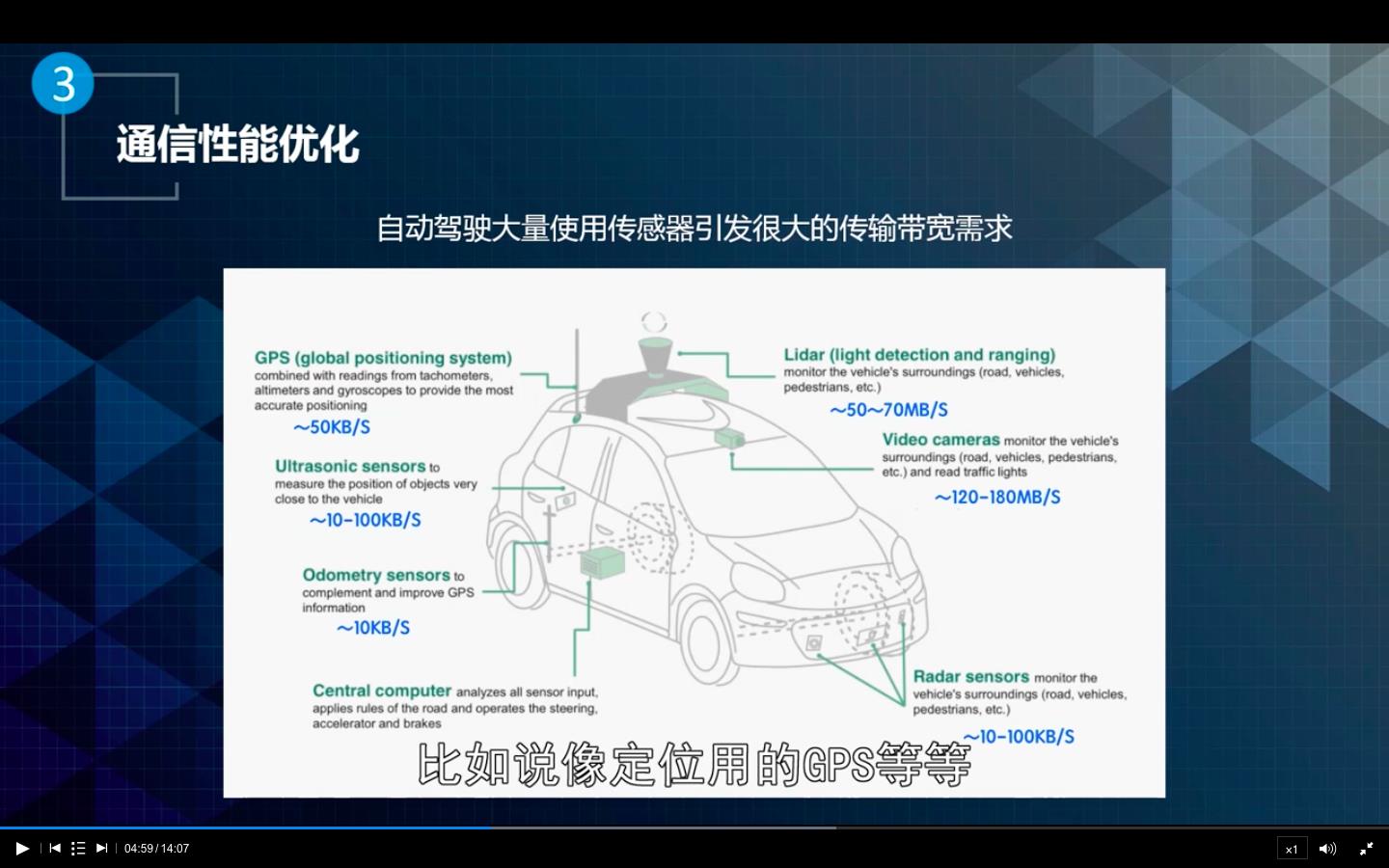
- Sensor data is mass.Sensor data transportion latency will be a problem,when through-output is not enough,which will result in extremely danger while driving. Such as:
- camera data : ~ 5MB/s per camera
- LIDAR data :~ 20 MB/s per LIDAR
- centralize communication mechanism
- none real-time OS
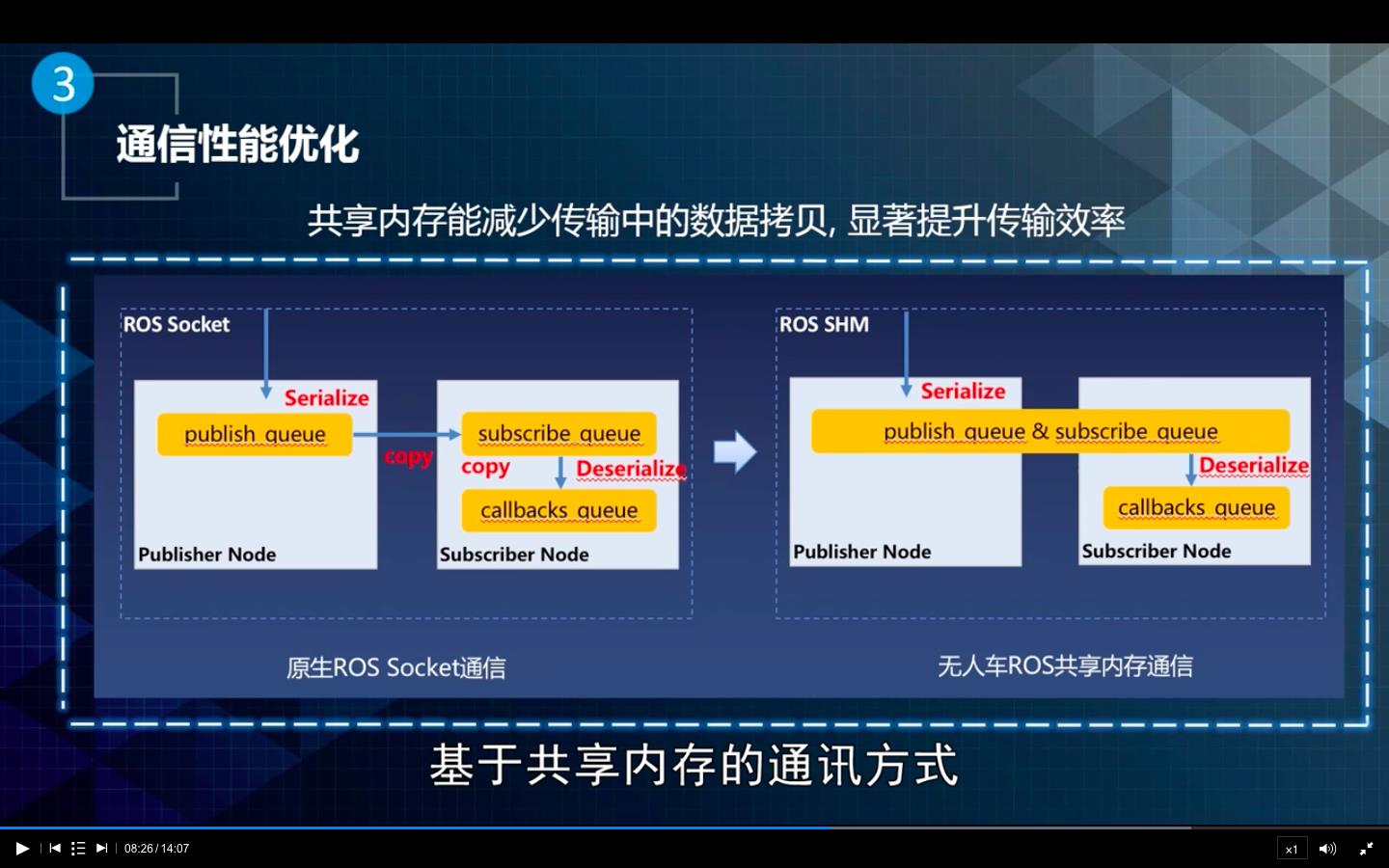
1. 通信系统优化
- copy consumption
-
class ROS : 4 times copy
- 用户态 --> 内核态 --> 用户态 --> node间IPC copy ——> deserialize copy
-
Apollo ROS : 2 times copy
- 减少了用户态 --> 内核态 --> 用户态的两次copy
- 减少了用户态 --> 内核态 --> 用户态的两次copy
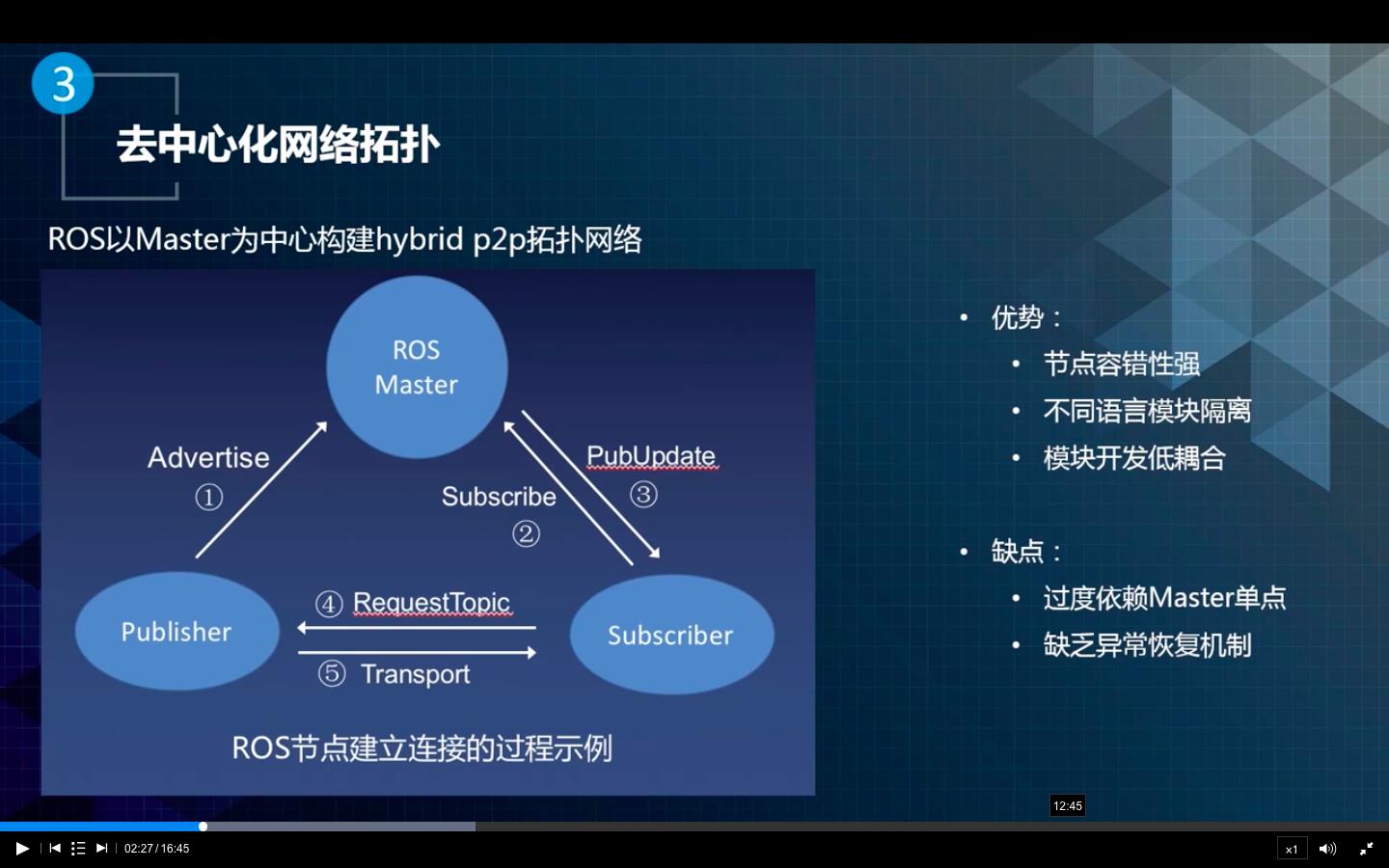
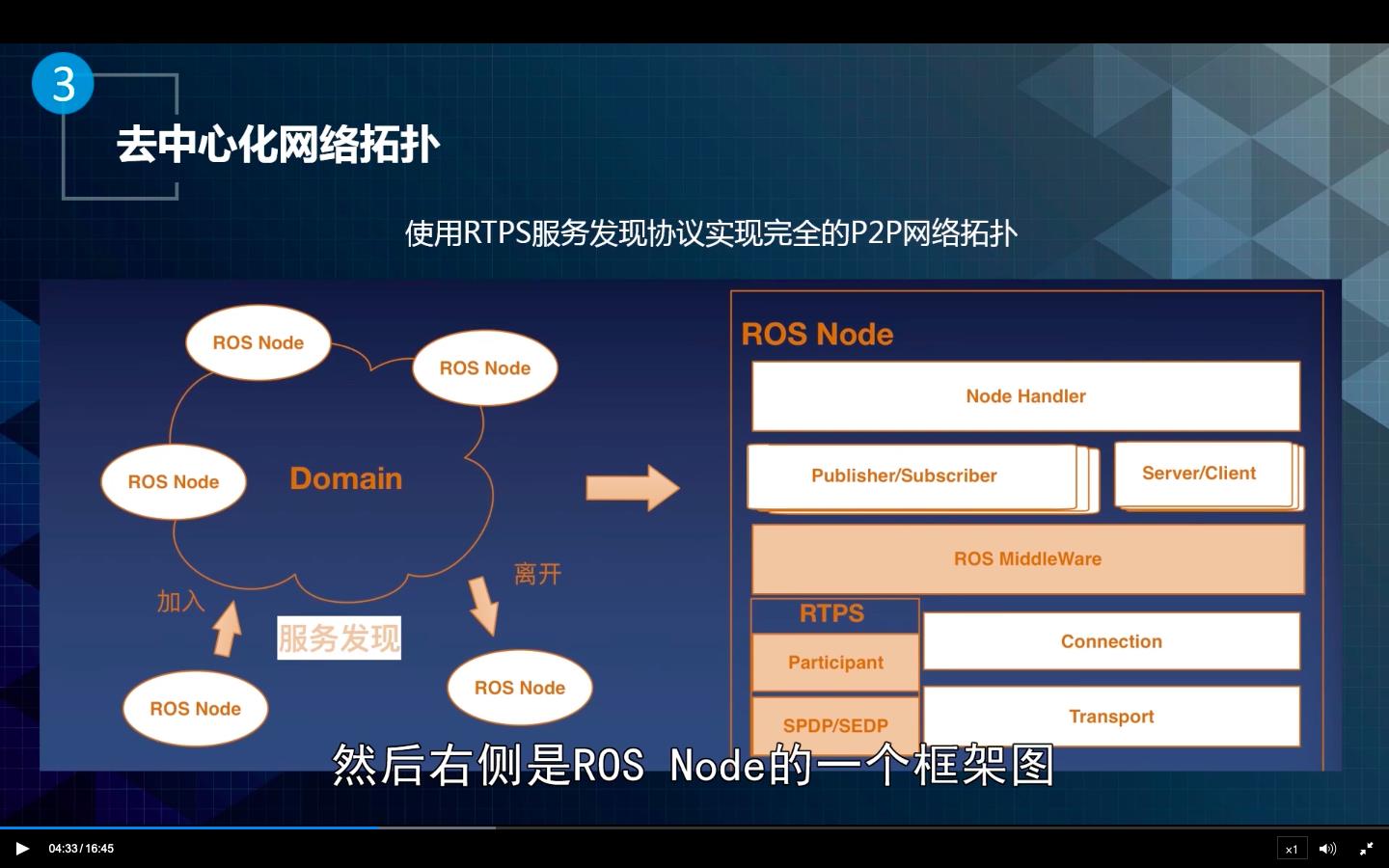
decentralized communication network
create node and communication init
以上是关于Apollo Advanced Lesson | Chapter6-1 ROS的主要内容,如果未能解决你的问题,请参考以下文章