车路协同 智能路侧决策系统总体架构及应用
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了车路协同 智能路侧决策系统总体架构及应用相关的知识,希望对你有一定的参考价值。
1 范围
本文件旨在规定车路协同 智能路侧决策系统 的系统总体架构、协同决策应用功能要点和环节分工以及云边端协同决策机制。
本标准适用于新建、改(扩)建城市道路及公路的决策系统部分的建设和管理,以及已有城市道路及公路的智慧化升级。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
YD/T 3709 基于LTE的车联网无线通信技术 消息层技术要求
YD/T 3755 基于LTE的车联网无线通信技术 支持直连通信的路侧设备技术要求
T/CSAE 53-2017 合作式智能运输系统 车用通信系统应用层及应用数据交互标准(一阶段)
T/CSAE 157-2020 合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第二阶段)
T/CASE 158-2020 基于车路协同的高等级自动驾驶数据交互内容
T/ITS 0117 合作式智能运输系统 RSU与中心子系统间数据接口规范
3 术语和定义
下列术语和定义适用于本文件。
3.1 定义
智能路侧决策系统 roadside intelligent decision-making system
智能路侧决策系统是指位于道路侧的可为智能网联车辆、信息化设施设备、管控设备提供决策指令以提升总体交通收益的系统。系统可以根据所感知的信息以及预期实现的目标,与车辆协作或独立做出决策,决策维度包括宏、微观时空资源,具体表现形式包括但不限于专用道管理、信号管理、路径诱导、生态驾驶、编队管理、自动驾驶轨迹点规划等。
智能路侧决策系统 中心平台 roadside intelligent decision-making system central platform
指承担中心决策功能的独立平台或功能模块。。
智 能 路 侧 决 策 系 统 边 缘 计 算 节 点 roadside intelligent decision-making system
multi-access edge computing node
指部署在道路承担路侧近端决策功能并具备汇聚其他道路附属设施数据和分析处理能力、支持标准化应用服务运行的计算设备。
车路协同 vehicle-infrastructure coordination
车路协同是通过利用先进的无线通信技术实现车辆与道路在感知、决策等维度实现有效协同的状态,可从效率、碳排放、安全多个方面改善交通。
3.2 缩略语
下列缩略语使用于本文件。
4G:第四代移动通信技术 the 4th Generation mobile communication technology
5G:第五代移动通信技术 the 5th Generation mobile communication technology
APP:移动端应用程序 Application
C-V2X:蜂窝车联网 Cellular-V2X
HV:主车 Host Vehicle,
MEC:多接入边缘计算 Multi-access Edge Computing
P:行人 Pedestrian
RSU:路侧单元 Road Side Unit
RV:远车 Remote Vehicle
V2X:车载单元与其他设备通信 Vehicle to Everything
4 系统总体架构
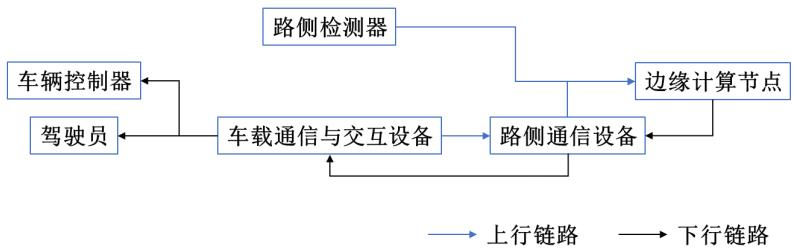
系统由智能路侧决策系统 中心平台(简称“云平台”)、智能路侧决策系统 边缘计算节点(简称“边缘计算节点”)、车端构成。车辆控制器与边缘计算节点通过车路协同系统交互,边缘计算节点与云平台通过光纤网络交互,云平台与车辆控制器或APP等车联网终端通过4G/5G交互。
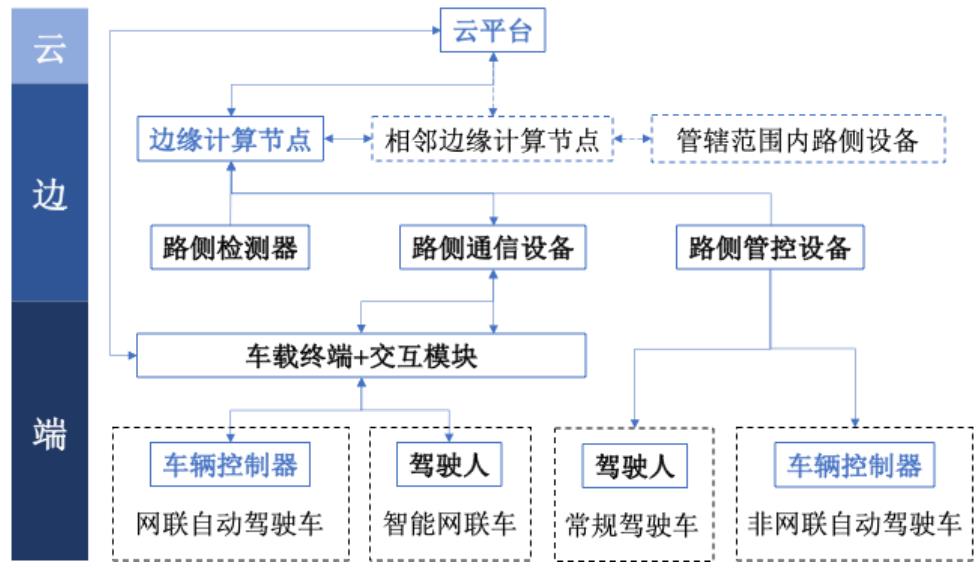
智能路侧决策系统 中心平台(简称“云平台”):云平台根据各边缘计算节点及车辆控制器上报的交通运行状态信息,针对不同的应用场景,宏观制定交通管控决策和智能车辆辅助决策。
智能路侧决策系统 边缘计算节点(简称“边缘计算节点”):边缘计算节点通过获取激光雷达、摄像机、毫米波雷达等的感知数据,运行相关程序算法进行计算并输出,包括动态制定具体的交通管控决策和智能车辆辅助决策。具体为研判安全风险,决策规避指令;提示路况信息,给定限速信息、建议车速、车道信息以及更新信号方案;动态车辆引导,给定建议车道、换道位置、建议轨迹点等。
智能路侧决策系统分为三个决策等级,依次为道路管控智能决策、车路协同目标决策、车路协同过程决策。三个决策等级的精细化程度和覆盖范围逐步提升。
道路管控智能决策:系统具有集计感知能力,可以获取流量、车速、密度等交通流运行参数,判断总体交通需求及道路运行状态,进而动态制定决策方案以主动响应交通需求,决策指令通过信号灯、可变情报板、播音喇叭等路侧传统声光设施发布。
车路协同目标决策:系统具有个体级感知能力,可以获取车辆轨迹信息,可以综合考虑轨迹信息和集计参数动态制定决策方案以主动响应交通需求,决策指令一方面可以通过信号灯、可变情报板、播音喇叭等路侧传统声光设施发布,另一方面可以通过车路协同等手段为个体智能车辆提供建议路径、车速引导等辅助决策服务,提供的决策指令主要通过建议车道、建议车速等控制目标呈现,个体智能车辆可在上述建议指令的基础上独立或辅助驾驶员进行单车独立/多车协同决策。
车路协同过程决策:系统具有个体级感知能力,可以获取车辆轨迹信息,可以综合考虑轨迹信息和集计参数同时综合考虑个体车辆控制与交通流控制动态制定决策方案以主动响应交通需求,决策指令一方面可以通过信号灯、可变情报板、播音喇叭等路侧传统声光设施发布,另一方面可以通过车路协同等手段为个体智能车辆提供建议路径、车速引导、自动驾驶轨迹参考点等决策服务,提供的决策指令主要通过轨迹参考点等控制过程呈现,智能路侧决策系统参与辅助车辆控制,个体智能车辆可在上述建议指令的基础上独立或辅助驾驶员进行单车独立/多车协同决策。
5 协同决策应用及环节分工
不同等级的智能路侧决策系统对感知能力、决策方案、与个体协同能力、指令下达方式、车路协同的技术发展等方面具有不同要求。
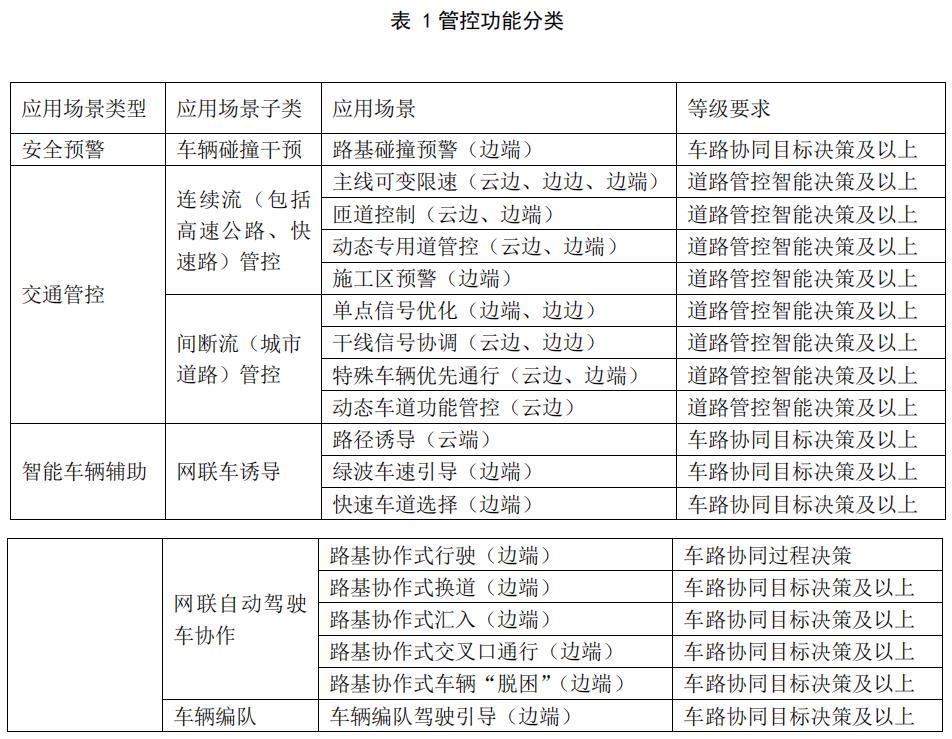
5.1 协同决策应用列表
5.2 安全预警决策应用环节分工
5.2.1 路基碰撞预警
1)应用描述
路基碰撞预警是指,边缘计算节点判断主车与周边车辆及其他弱势交通参与者是否存在碰撞风险,若存在风险时,应对主车进行预警,提供冲突对象位置、建议车速、制动措施等信息。
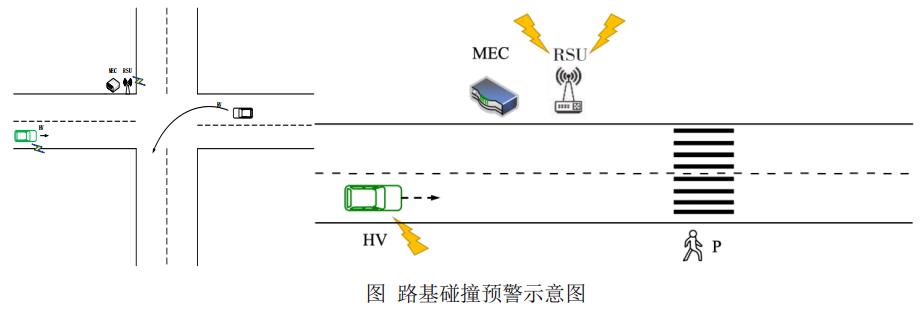
2)场景原理
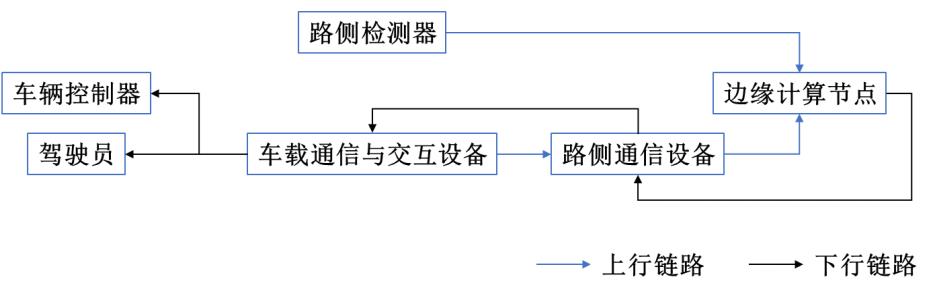
3)环节分工
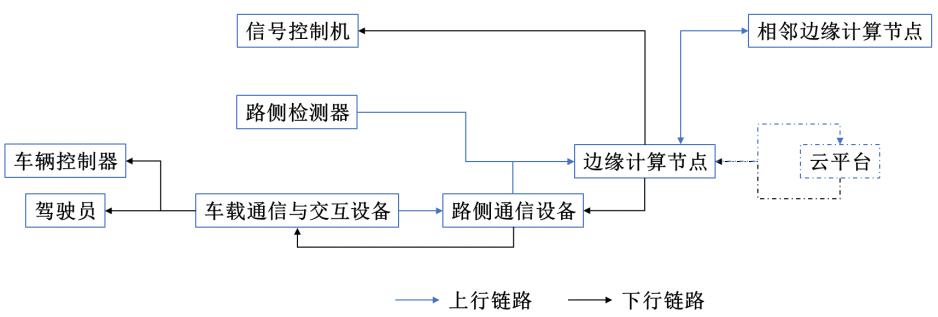
本应用为边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:输入感知信息,研判碰撞风险,决策规避指令,输出①冲突对象位置(车路协同目标决策);②建议车速、制动措施(车路协同目标决策);③轨迹参考点等协同决策信息(车路协同过程决策);
车辆控制器:输入边缘计算节点输出冲突对象及协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——车速范围:0~70 km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——通信距离(可选)≥150m;
——数据更新频率:10Hz;
——系统延迟≤100ms;
——定位精度(可选)≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 157-2020(有补充)]
5.3 交通管控决策应用环节分工
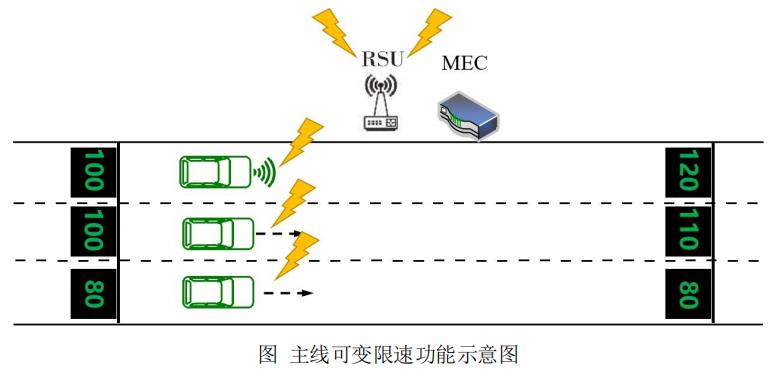
主线可变限速
1)应用描述
主线可变限速是指,系统通过判断道路主线的综合交通运行状况(包括交通流量、交通车速等)是否存在运行安全风险或者运行效率优化,若存在时,应对主线的相关车辆进行诱导,提供建议的通行速度辅助车辆通行等信息。
2)场景原理
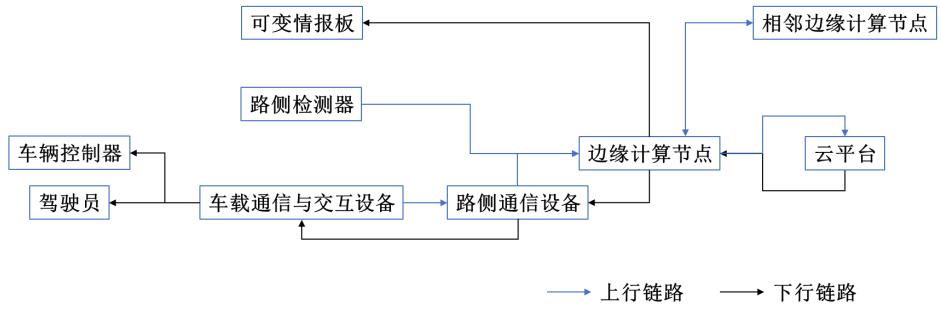
3)环节分工
本应用涉及云边、边边、边端协同,涉及云平台、边缘计算节点、车辆控制器三项决策主体,分工如下:
云平台:根据各边缘计算节点上报的交通运行状态信息以及各节点主动限速现状,动态制定各节点的主动限速范围;
边缘计算节点:通过感知信息研判交通流状态,综合考虑平台给定主动限速范围与相邻节点限速值制定①一般性限速信息(道路管控智能决策及以上);②个性化建议车速(车路协同目标决策)、轨迹参考点(车路协同过程决策)等个性化协同决策信息;输出①发送至可变情报板,输出②发送至自动驾驶车辆或网联车驾驶员
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——车速范围:0~130 km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——通信距离(可选)≥300m;
——数据更新频率:1Hz(一般性限速信息)/10Hz(个性化协同决策信息);
——系统延迟≤200ms(道路管控智能决策)/100ms(车路协同目标决策及以上);
——定位精度(可选)≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 53-2017(有补充)]
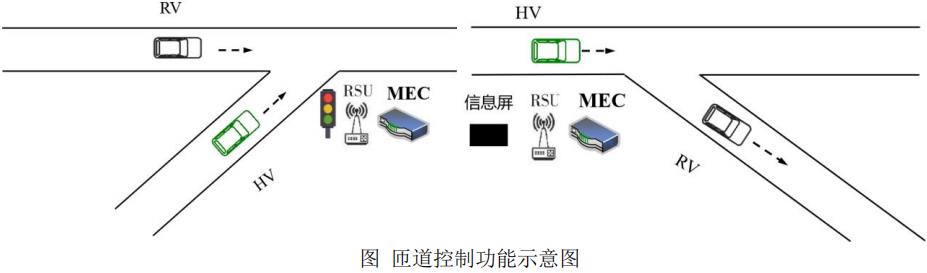
匝道控制
1)应用描述
匝道控制是指,系统根据高速主线、匝道车辆运行信息,利用信号灯、信息情报板等告知车辆通行,实现平衡车道流量、主线车辆协调行驶、汇入间距管理、匝道车辆运行控制等,以显著减小汇入区事故率,提高车辆汇入效率和速度,提高车辆汇出的安全性。
2)场景原理
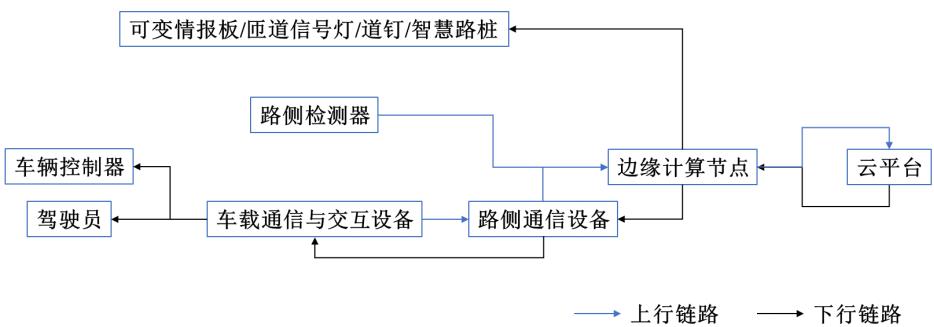
3)环节分工
本应用涉及云边、边端协同,涉及云平台、边缘计算节点、车辆控制器三项决策主体,分工如下:云平台:根据各边缘计算节点上报的交通运行状态信息统筹考虑各匝道汇入调节率,将调节率下发边缘计算节点;
边缘计算节点:通过感知信息获取汇入汇出车辆及周边端辆微观轨迹,结合平台给定的调节率要求,制定①一般性引导信息(道路管控智能决策及以上);②个性化建议车速(车路协同目标决策)、轨迹参考点(车路协同过程决策)等个性化协同决策信息;输出①发送至可变情报板、道钉等交通设施,为所有类型车辆服务,输出②发送至自动驾驶车辆或网联车驾驶员
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——车速范围:0~120 km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——通信距离(可选)≥300 m;
——数据更新频率1Hz(一般性引导信息)/10Hz(个性化协同决策信息);
——系统延迟≤200ms(道路管控智能决策)/100ms(车路协同目标决策及以上);
——定位精度(可选)≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 53-2017(有补充)]
动态专用道管控
1)应用描述
动态专用车道管控是指系统根据主线交通状况,考虑主线车辆流量、不同车型的运行差异及不同车道的运行差异,采用车型管控、时间管控及速度管控等方式将某条车道动态划分给车辆通行,以显著提升车道的总体利用效率,适用于货运编队、公交、自动驾驶专用道。
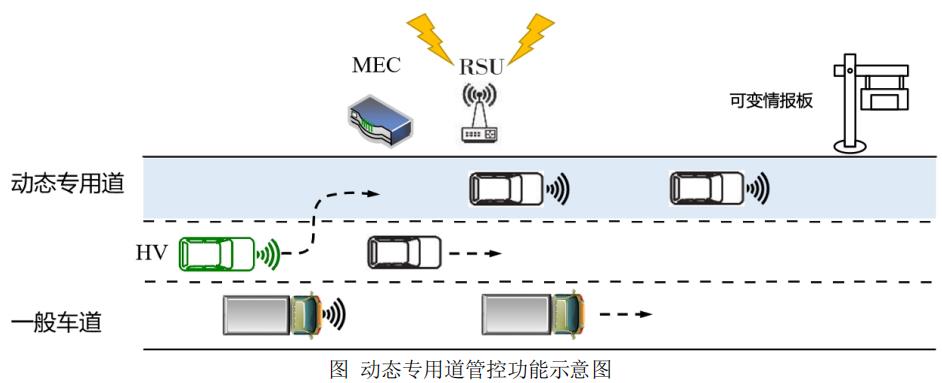
2)场景原理
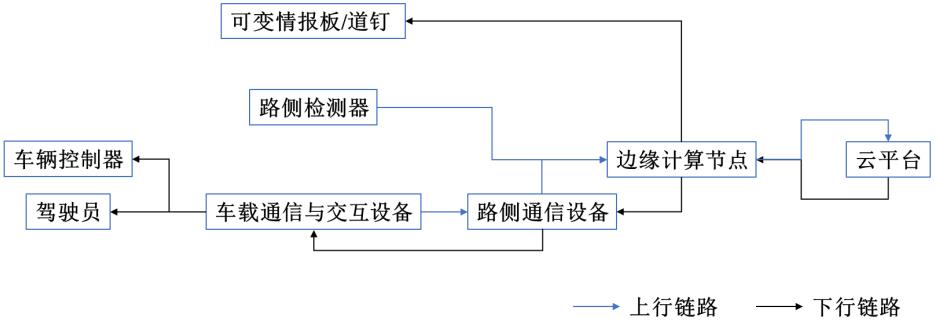
3)环节分工
本应用涉及云边、边端协同,涉及云平台、边缘计算节点、车辆控制器三项决策主体,分工如下:
云平台:根据各边缘计算节点上报的交通运行状态信息以及各节点管理路段专用道分配情况,动态制定各节点的专用道设置限制条件,避免出现专用道不连续等情况;
边缘计算节点:通过感知信息研判交通流状态,分析动态渗透率,综合考虑平台给定专用道设置限制制定专用道信息,发送至可变情报板或道钉以及通信设备,告知专用道开放状态信息。
4)技术指标要求
——车速范围:0~120km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——通信距离≥150m;
——定位精度≤1.5m;
——目标感知精度(可选)≤1.5m。
[来源:T/CSAE 53-2017(有补充)]
施工区预警
1)应用描述
施工检修或者维护时,施工区使高速公路连续流收到人工阻隔,容易产生交通瓶颈,施工人员及途经车辆发生碰撞的风险较高。施工区预警服务能够有效提升施工区附近的通行效率,降低车辆及施工人员事故风险,提高施工区交通安全。
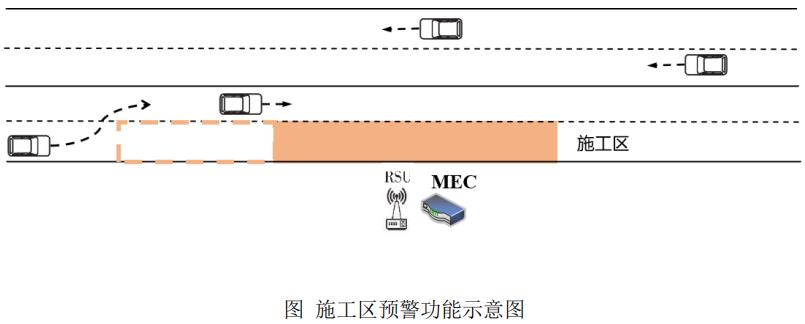
2)场景原理
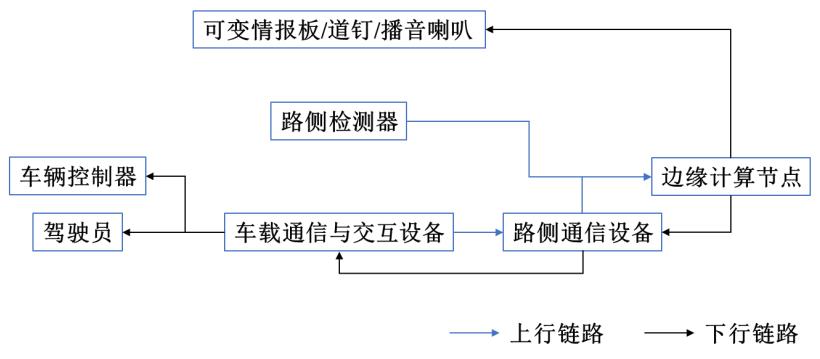
3)环节分工
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息研判施工区上游路段与施工区所在路段交通流状态,以安全和效率为导向制定①施工提示信息及建议车速(道路管控智能决策及以上);②个性化建议车速(车路协同目标决策)、轨迹参考点(车路协同过程决策)等个性化协同决策信息;输出①发送至可变情报板提醒常规车辆,输出②发送至自动驾驶车辆或网联车驾驶员引导交通流平稳过渡,安全通过;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——车速范围:0~120km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——建议提示距离:1km,或500m,或200m;
——系统延迟≤200ms;
——定位精度≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 53-2017(有补充)]
单点信号优化
1)应用描述
单点信号控制又称为点控制,指的是每个交叉口的交通信号控制只按照该交叉口的自身实际情况独立运行,不与邻近的交叉口有任何联系。系统根据交通运行状态优化调整信号控制参数,达到较好的信号控制水平,提高交叉口通行效率。
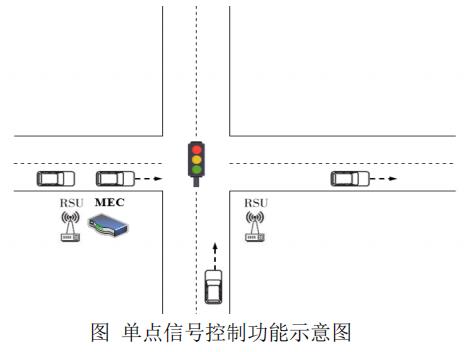
2)场景原理
3)环节分工
本应用涉及云边(如有,非必须)、边边、边端协同,涉及云平台(如有,非必须)、边缘计算节点、车辆控制器三项决策主体,分工如下:
云平台(如有,非必须):综合考虑各边缘计算节点上报信息,制定子区划分方案与背景信控方案;
边缘计算节点:通过感知信息研判交通状态与控制情况,综合考虑周边节点交通需求水平与控制水平,制定①信号控制信息(道路管控智能决策及以上);②个性化建议车速(车路协同目标决策)、轨迹参考点(车路协同过程决策)等个性化协同决策信息;输出①发送至信号机改善信控水平,输出②发送至自动驾驶车辆或网联车驾驶员,与信控方案配合优化交叉口通行效率与排放;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——车速范围0~70km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——定位精度(可选)≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 157-2020(有补充)]
干线信号协调
1)应用描述
干线信号协调控制策略控制是为了减少车辆在各个交叉口的停车次数,提出一种各路口间相互协调的配时方案。通场采用特定的相位差设计实现带宽最大化,车辆按特定车速范围内行驶可实现连续不停车通过交叉口。
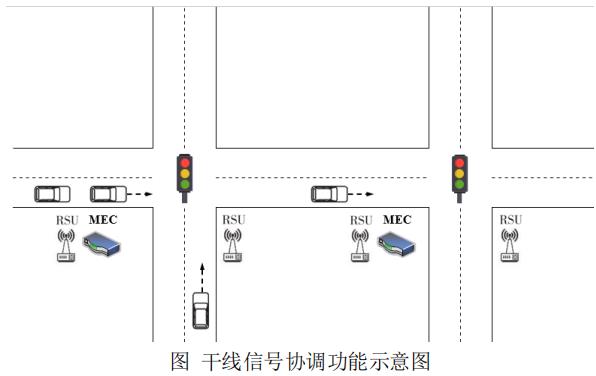
2)场景原理
3)环节分工
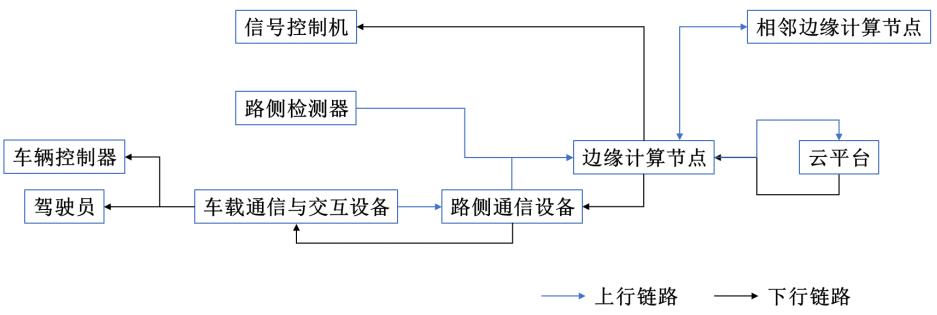
本应用涉及云边、边边协同,涉及云平台、边缘计算节点两项决策主体,分工如下:
云平台:根据各边缘计算节点上报的交通运行状态与需求情况动态制定干线范围,确定控制周期,下发至边缘计算;
边缘计算节点:通过感知信息研判交通状态与控制情况,根据云平台下发的周期、分组情况以及相邻边缘计算节点的控制方案,动态更新信号方案,确定建议车速,而后进入单点信号优化决策流程。
4)技术指标要求
——车速范围0~70km/h;
——交通流数据周期:30s
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——定位精度(可选)≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 157-2020(有补充)]
特殊车辆优先通行
1)应用描述
特殊车辆优先通行是指,系统根据特殊车辆的到达情况,计算出合适的信号相位,为其提供优先通行便利,并提供交叉口距离信息、交叉口信号信息、建议车速等信息。
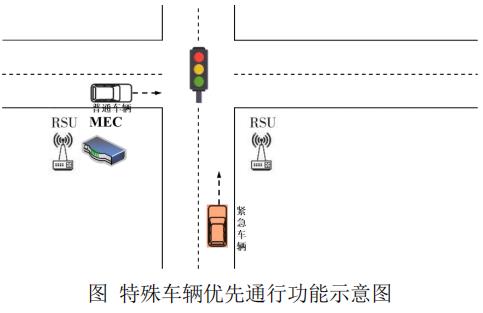
2)场景原理
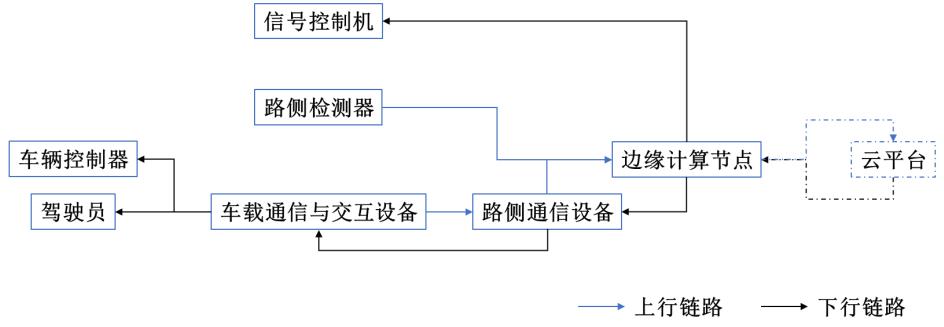
3)环节分工
本应用涉及云边(如有,非必须)、边端协同,涉及云平台(如有,非必须)、边缘计算节点、车辆控制器三项决策主体,分工如下:
云平台(如有,非必须):根据第三方平台提供的信息确定车辆类型对应的优先级,综合考虑各边缘计算节点上报的交通状态信息,为各边缘计算节点制定不同优先级对应的信号优先权限;
边缘计算节点:通过感知信息研判交通状态,通过通信设备获取优先请求,结合云平台给定的优先权限,动态更新信号方案,给出优先结果,确定建议车速(车路协同目标决策)或轨迹参考点(车路协同过程决策)等决策参考信息。
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——主车车速范围:0~120km/h;
——通信距离:≥200m;
——数据更新频率1Hz(信号控制信息)/10Hz(个性化协同决策信息);
——系统延迟≤200ms(道路管控智能决策)/100ms(车路协同目标决策及以上);
——交通流感知精度≥95%;
——定位精度≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 157-2020(有补充)]
动态车道功能管控
1)应用描述
动态车道功能管控主要为系统根据实时交通状况对路段车道行驶方向的的动态管理、对交叉口进口道的功能的动态管理、以及对于车道方向的综合管控。
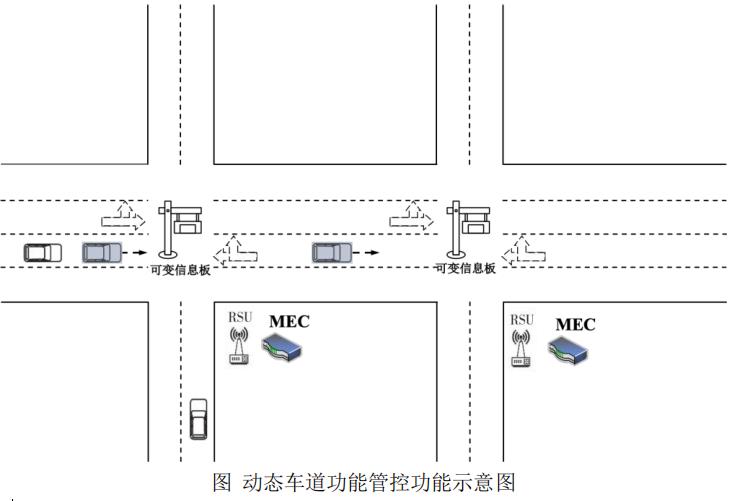
2)场景原理
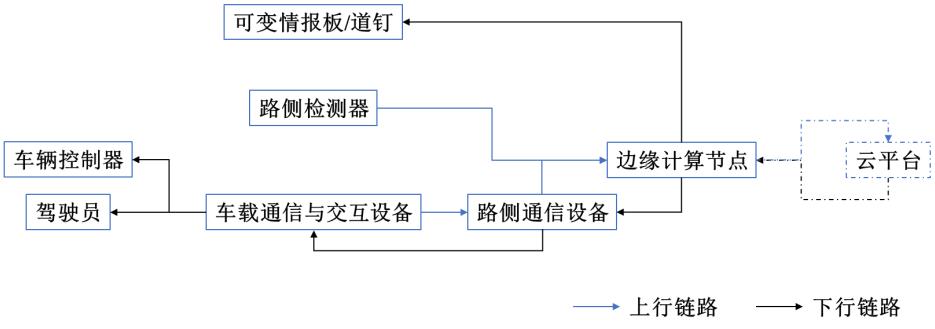
3)环节分工
本应用涉及云边协同,涉及云平台(如有,非必须)、边缘计算节点两项决策主体,分工如下:云平台(如有,非必须):根据各边缘计算节点上报的交通状态以及现实道路物理情况与交通管理要求,为各边缘计算节点制定动态车道管控限制;
边缘计算节点:通过感知信息研判交通状态,结合云平台给定的管控权限,动态更新车道功能方案,通过道钉、可变情报板指明车道功能,通过路侧通信设备广播相关信息。
4)技术指标要求
——主车车速范围(0~70) km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——通信距离(可选)≥200 m;
——数据更新频率≥2Hz;
——系统延迟≤100ms;
——定位精度(可选)≤1.5m。
[来源:T/CSAE 157-2020(有补充)]
5.4 智能车辆辅助决策应用环节分工
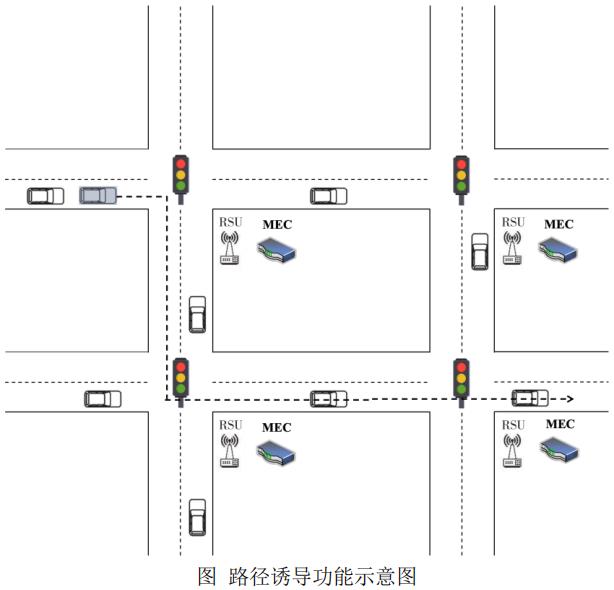
路径诱导
1)应用描述
路径诱导是指,系统通过熟悉交通网络状态及需求,为网联车辆提供路径引导,促使车辆在最佳线路上行驶,节约出行时间。
2)场景原理
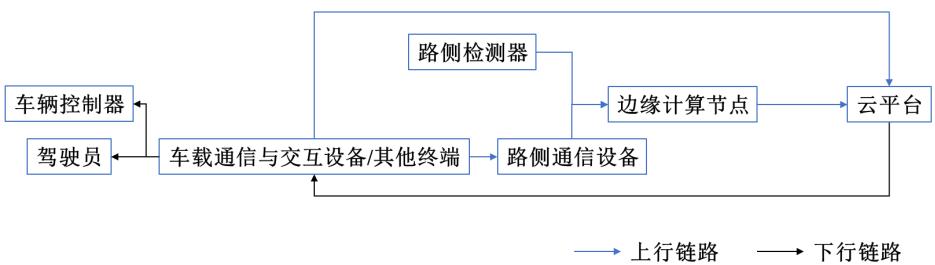
3)环节分工
本应用涉及云端协同,涉及云平台、车辆控制器两项决策主体,分工如下:
云平台:根据各边缘计算节点上报的交通状态动态梳理及预测网络交通状态,根据车辆终端上报的出行需求,统筹考虑系统需求与个体需求,动态寻求最优路径,下发至车辆;
车辆控制器:输入平台给定的路径方案,进行动作规划。
4)技术指标要求
——主车车速范围(0~70)km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——通信距离(可选)≥150m;
——数据更新频率1Hz;
——系统延迟≤200ms;
——定位精度≤1.5m。
[来源:T/CSAE 53-2017(有补充)]
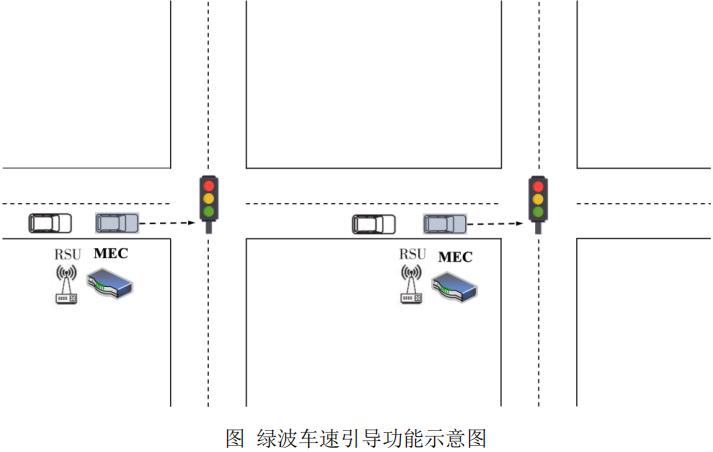
绿波车速引导
1)应用描述
绿波车速引导是指,通过采集特定路段的信号、实时交通状况、网联车辆实时位置等信息,结合干线信号协调(绿波)方案给出该路段中车辆的建议行驶速度或行驶方案,使得按照引导车速驾驶的车辆可以少停车地通过交叉口。
2)场景原理
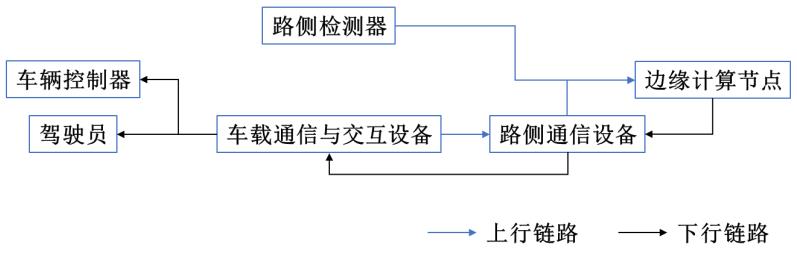
3)环节分工
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息研判交通状态,在安全前提下制定兼顾总体交通流影响且可引导车辆
不停车通过交叉口的个性化建议车速(车路协同目标决策)、轨迹参考点(车路协同过程决策)等个性
化协同决策信息;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——主车车速范围(
0~70 )km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——通信距离≥150m;
——数据更新频率1Hz;
——系统延迟≤200ms;
——定位精度≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 53-2017(有补充)]
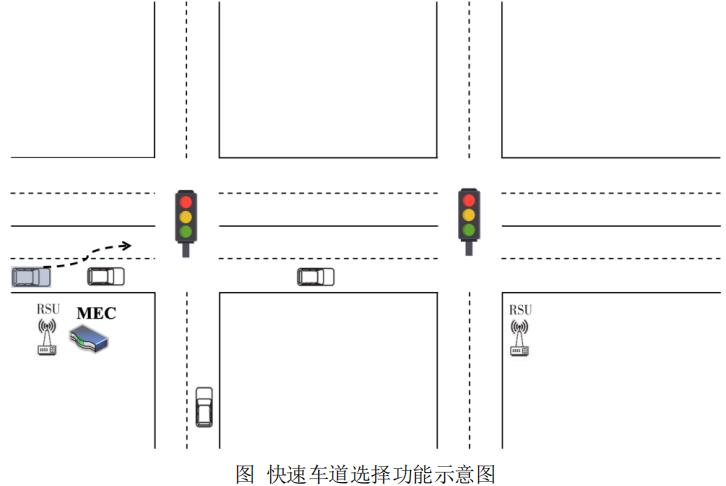
快速车道选择
1)应用描述
快速车道选择是指在交叉口根据实时车道功能以及交通状态,结合网联车意图和请求,为每一辆网联车提供车道选择建议。
2)场景原理
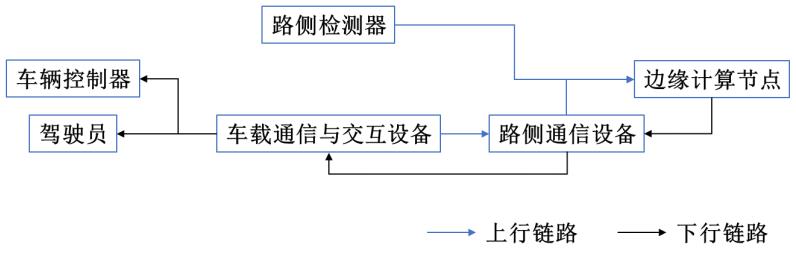
3)环节分工
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息研判各进口道交通状态,在安全前提下制定兼顾总体交通流影响与个体车辆行驶方向目标,优化给出①建议车道选择、建议换道位置(车路协同目标决策);②轨迹参考点(车路协同过程决策)等不同等级的个性化协同决策信息;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——主车车速范围(0~70)km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1.5m;
——通信距离≥150m;
——数据更新频率1Hz;
——系统延迟≤200ms;
——定位精度≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 53-2017(有补充)]
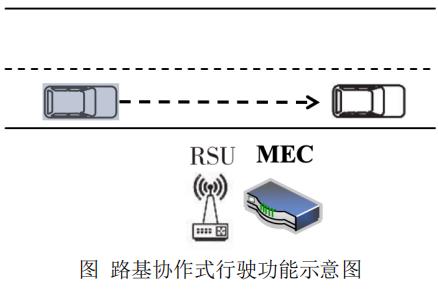
路基协作式行驶
1)应用描述
路基协作式行驶是指,通过采集车辆位置数据、车辆速度数据等信息,根据实时道路环境,以轨迹点的方式,为具备自动驾驶功能的网联车辆提供前方100米范围内的局域路径规划建议。
2)场景原理
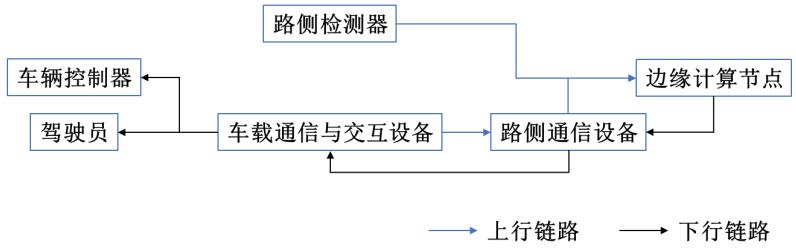
3)环节分工
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息获取各交通参与者实时动态信息并进行预判,在安全前提下制定兼顾总体交通流影响与个体车辆行驶目标,优化给出轨迹参考点引导车辆行驶;
车辆控制器:输入边缘计算节点给定的轨迹参考点信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——主车车速范围(0~130)km/h;
——通信距离≥150m;
——数据更新频率10Hz;
——系统延迟≤100ms;
——定位精度≤0.5m。
[来源:T/ITS 0135-2020(有补充)]
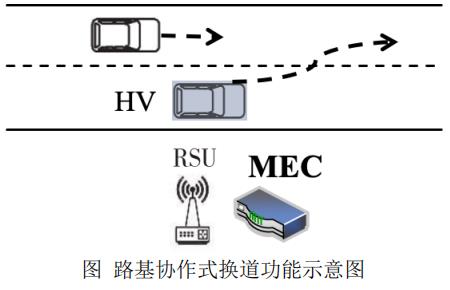
路基协作式换道
1)应用描述
路基协作式换道是指,设备通过路侧感知设备采集车辆的轨迹信息,系统根据网联车意图,结合其他车辆轨迹预测结果,为网联车辆提供换道建议,实现混合交通流下的车辆换道协同。
2)场景原理
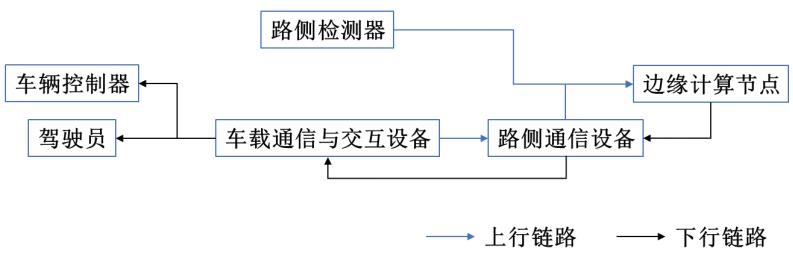
3)环节分工
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息获取各交通参与者实时动态信息并进行预判,在安全前提下制定兼顾总体交通流影响与个体车辆行驶目标,优化给出①车道选择建议、建议换道位置(车路协同目标决策);
②轨迹参考点(车路协同过程决策)等不同等级的协同决策信息;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——车速范围:0~120km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤0.5m;
——通信距离(可选)≥200m;
——数据更新频率≥10Hz;
——系统延迟≤50ms;
——定位精度(可选)≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 157-2020(有补充)]
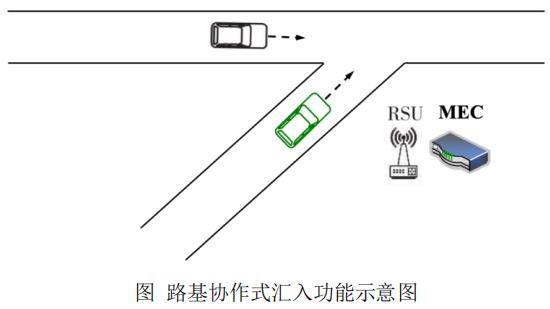
路基协作式汇入
1)应用描述
路基协作式汇入是指,通过路侧感知设备采集的匝道与主路车辆,系统根据网联车意图,结合其他车辆轨迹预测结果,为网联车辆提供换道建议和车速建议,实现车路协同车辆汇入。
2)场景原理
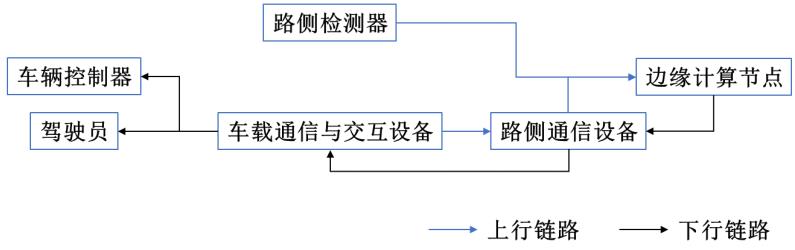
3)环节分工
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息获取主路、匝道各交通参与者实时动态信息并进行预判,在安全前提下制定兼顾总体交通流影响与个体车辆行驶目标,对不同角色的智能车辆优化给出①建议车速、车道选择建议、建议换道位置(车路协同目标决策);②轨迹参考点(车路协同过程决策)等不同等级的协同决策信息;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——主车车速范围(0~120)km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤0.5m;
——通信距离≥300m;
——数据更新频率10Hz;
——系统延迟≤50ms;
——定位精度≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/CSAE 157-2020(有补充)]
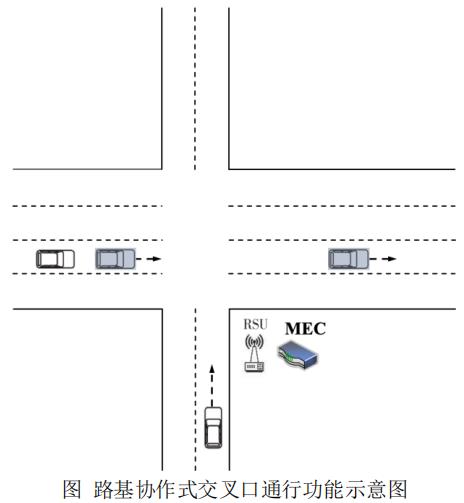
路基协作式交叉口通行
1)应用描述
路基协作式交叉口通行是指,通过路侧感知设备采集交叉口车辆实时信息,系统根据自动驾驶车意图,结合其他车辆轨迹预测结果,为自动驾驶车辆提供建议轨迹点,实现无信号控制交叉口处车辆安全、高效通行。
2)场景原理
3)环节分工
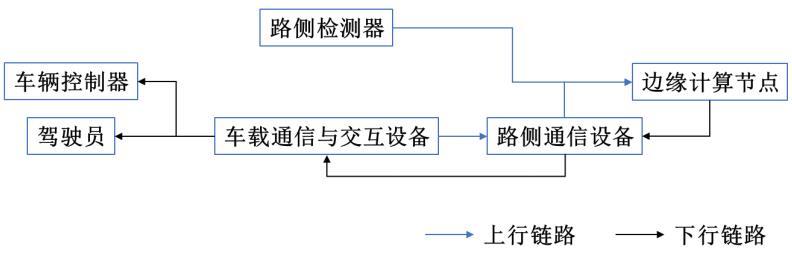
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息获取交叉口范围内各交通参与者实时动态信息并进行预判,在安全前提下制定兼顾总体交通流影响与个体车辆行驶目标,对智能车辆优化给出①建议通过时间、建议车速、车道选择建议、建议换道位置(车路协同目标决策);②轨迹参考点(车路协同过程决策)等不同等级的协同决策信息;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行动作。
4)技术指标要求
——主车车速范围(0~120)km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度≤0.5m;
——通信距离≥200m;
——数据更新频率10Hz;
——系统延迟≤20ms;
——定位精度≤1.5m(车路协同目标决策)/0.5m(车路协同过程决策)。
[来源:T/ITS 0135-2020(有补充)]
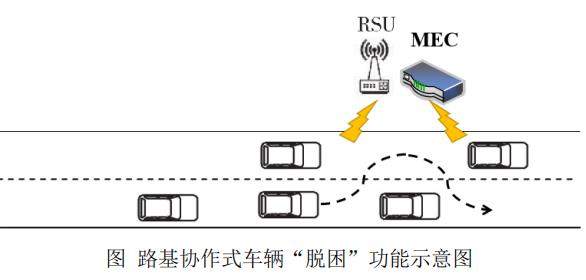
路基协作式车辆“脱困”
1)应用描述
路基协作式自动驾驶车辆“脱困”是指,在极端场景下,当自动驾驶车辆自动驾驶模式停止时,不需要通过人工干预,能够帮助自动驾驶车辆“脱困”,提升自动驾驶车辆自动运行性能的功能。
2)场景原理
3)环节分工
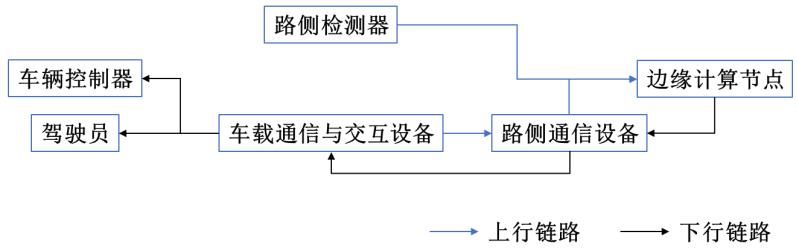
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:在收到车辆请求后,通过感知信息获取车辆“被困”范围内各交通参与者实时动态信息并进行预判,在安全前提下制定“脱困”方案,对智能车辆优化给出①建议启动时间、建议车速、车道选择建议、建议换道时间与位置(车路协同目标决策);②轨迹参考点(车路协同过程决策)等不同等级的协同决策信息;
车辆控制器:输入边缘计算节点给定的协同决策信息,结合自身感知能力进行终端决策并执行“脱困”动作。
4)技术指标要求
——车速范围:0~120km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤0.5m;
——通信距离(可选)≥200m;
——数据更新频率≥10Hz;
——系统延迟≤20ms;
——定位精度(可选)≤0.5m。
[来源:T/ITS 0135-2020(有补充)]
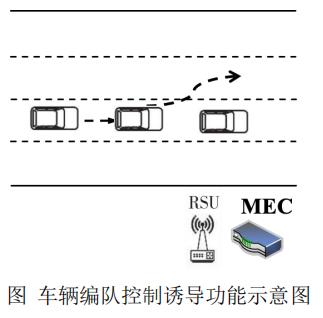
车辆编队控制诱导
1)应用描述
车辆编队控制诱导是指,系统根据前方交通状况,向正在运行的车辆编队发布换道、解散等编队控制诱导。
2)场景原理
3)环节分工
本应用涉及边端协同,涉及边缘计算节点、车辆控制器两项决策主体,分工如下:
边缘计算节点:通过感知信息获取微观交通状态以及事件信息,在安全前提下制定兼顾总体交通流影响与编队行驶目标,对车辆编队给出建议车道、建议换道位置、建议车速、建议解散编队、建议重组编队等的协同决策信息;
车辆控制器:输入边缘计算节点给定的协同决策信息,由编队头车或编队成员协同决策编队动作。
4)技术指标要求
——主车车速范围(0~120)km/h;
——交通流数据周期:30s;
——交通流感知精度≥95%;
——目标感知精度(可选)≤1m;
——通信距离≥400m;
——数据更新频率10Hz;
——系统延迟≤50ms;
——定位精度≤1m。
[来源:T/CSAE 157-2020(有补充)]
6 云边端协同决策机制
云边端协同决策机制是基于“云”、“边”、“端”三方的交互,对交通要素的感知、决策、协同,引导车辆规避拥堵路段,实现交通的安全行驶及高效通行。包括云边协同决策机制、边边协同决策机制、边端协同决策机制、云端协同决策机制。
其中,“云”为云平台,综合考虑各边缘计算节点上报信息及车辆上报需求信息,下发背景方案与权限信息;“边”为边缘计算节点,负责向云平台上报交通状态信息,现状控制方案,及相邻边缘计算节点间传递信息,向车辆下达指令信息;“端”为车端,负责向边、云上报需求信息,接收方案信息及指令。
根据第五章列出的各项协同决策应用的通信链路与环节分工,总结协同决策与交互需求如下表。

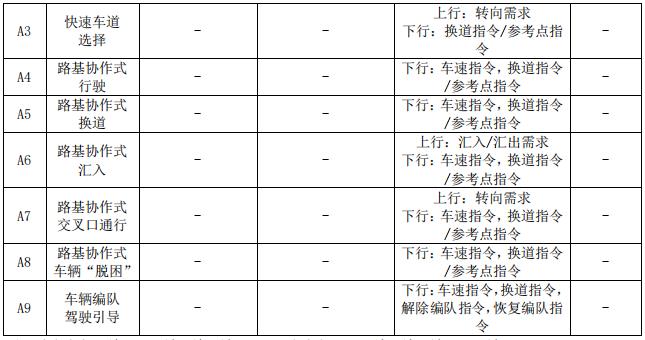
注:上行包括:边→云,端→边,端→云;下行包括:云→边,边→端,云→端。
6.1 云边协同决策机制
边缘计算节点需向云平台上报交通状态信息、现状控制方案,其中现状控制方案包括限速信息、车道功能、配时方案。
云平台综合考虑各节点上报情况,向边缘计算节点下发背景方案与权限信息,其中背景方案包括单点信号配时背景方案、所属子区、所属区间、协调优化周期,权限信息包括限速范围、匝道调节率、车道功能变化限制、优先权限。
6.2 边边协同决策机制
边边协同主要强调边缘计算应支持东西向接口,边边协同应满足边缘计算部署的架构,东西向路侧边缘计算节点(相邻)之间互相通信。相邻路侧边缘计算节点间需要互通交通状态信息及配时方案信息、限速信息、专用道信息,作为决策约束和考虑因素。
边缘计算节点在接收到相邻边缘计算节点时,需要评判所接收应用信息的优先级或发送信息的边缘计算节点优先级,边缘计算的设备优先级和应用优先级准许范围由云平台授予。当应用信息优先级或发送信息的边缘计算节点优先级较高时,收到信息的边缘计算节点以其为目标或约束进行自身决策;否则接收信息的边缘计算节点会优先考虑达成自身目标,仅考虑与所接收的决策信息不产生安全冲突的约束。
6.3 边端协同决策机制
车端需向路侧上报需求信息,包括转向需求、汇入/汇出需求。
路侧向车端下达指令信息,包括优先结果、预警信息、时间点指令、制动指令、车速指令、换道指令、参考点指令、解除编队指令、恢复编队指令。其中优先结果、预警信息、制动信息为初级决策指令,车速指令、换道指令为中级指令,参考点指令为高级指令,接触编队指令和恢复编队指令为编队级决策指令。
6.4 云端协同决策机制
车端需向云平台上报目的地需求,云平台向车端下达推荐路径信息。
以上是关于车路协同 智能路侧决策系统总体架构及应用的主要内容,如果未能解决你的问题,请参考以下文章