论文讲解:A Physics-based Noise Formation Model for Extreme Low-light Raw Denoising
Posted Matrix_11
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文讲解:A Physics-based Noise Formation Model for Extreme Low-light Raw Denoising相关的知识,希望对你有一定的参考价值。
论文讲解:A Physics-based Noise Formation Model for Extreme Low-light Raw Denoising
Introduction
这是发表在 CVPR 2020 上的一篇文章,依然是介绍如何构造更加真实的噪声数据,以用来处理暗光下的降噪问题,这篇文章比较系统地介绍了 sensor 在成像过程中的噪声是如何产生的,以及如何对噪声分布进行估计和参数的标定。对于了解 ISP 成像中的噪声问题有比较好的借鉴。
在 ISP 中,比较关键的两个图像质量一个是噪声,另外一个就是颜色,暗光下的噪声一般都比较严重,而且暗光下的颜色也不太好校正,暗光下的白平衡一般也是一个比较困难的问题。白平衡及颜色可以留在后面的文章再讨论,今天主要介绍暗光下的降噪问题。
ISP 中,噪声主要分为固定模式噪声和随机噪声,固定模式噪声,及 fixed pattern noise (FPN) 和 sensor 的制造工艺有关,这里不做讨论,一般学术界或者工业界处理比较多的都是随机噪声,随机噪声在 sensor 成像的流程中有几个地方都会产生:

- 插入图片
如上图所示,环境中的光和物体反射的光,通过镜头模组,照射到 CMOS sensor 上,通过光电效应,光子激发出电子,电子在 sensor 上的电势井里累积形成电压,电压信号通过模拟放大器放大,得到模拟电信号,然后再通过模数转换器及量化得到数字信号,量化输出 RAW 数据,这是 sensor 成像的一般流程,这个过程中,会有几种噪声产生,光电转换会产生 shot noise,模拟放大会产生 read noise,模数转换会产生量化噪声,除此之外,sensor上也会产生暗电流,从而形成暗电流噪声。
Physics-based Noise Formation Model
RAW 域的成像模型可以表示成如下式:
D = K I + N D = KI + N D=KI+N
其中, I I I 表示光电转化的电荷数, K K K 表示整个系统的增益, N N N 表示噪声
这篇文章从这个表达式出发,对不同流程中的噪声形态进行分布估计。
From Photon to Electrons
首先是光电转换,光线通过镜头模组照射到 sensor 上,激发出电荷,这个过程是有一定的随机性的,激发出的电荷多少与 sensor 的光电转换效率有关,也与 sensor 上每个 pixel 的 size 大小有关,但这个过程可以用泊松分布来表示:
( I + N p ) ∼ P ( I ) (I + N_p) \\sim \\mathcalP(I) (I+Np)∼P(I)
其中, N p N_p Np 表示光子散粒噪声,可以看到这个分布和光照强度有关,shot noise 是光电效应带来的固有属性,很难消除,除了 shot noise,还有一种称为暗电流的噪声,因为光电转换的时候,sensor 会发热,从而也会激发出电子,从而产生暗电流噪声,为什么称为暗电流噪声,因为我们把镜头遮住,在一个完全无光的环境下拍摄图像,虽然拍摄的 RAW 图是黑的,但不是绝对的 0 值,而是有一定的数值,这些数值其实就是暗电流噪声,暗电流噪声一般可以通过标定的方式得到,这里成为 N d N_d Nd
From Electrons to Voltage
光电转换之后,接下来就是电荷转换为电压,电压信号经过模拟器放大,得到模拟电信号,这个过程也会产生随机噪声,文章里把噪声分成 thermal noise, reset noise, source follower noise and banding pattern noise,这些噪声统称 read noise,
N r e a d = N t + N s + N d N_read = N_t + N_s + N_d Nread=Nt+Ns+Nd
一般我们都认为 read noise 服从高斯分布,不过这篇文章对 read noise 用了另外一种分布来表示,Tukey lambda distribution,
N r e a d ∼ T L ( λ , 0 , σ T L ) N_read \\sim TL(\\lambda, 0, \\sigma_TL) Nread∼TL(λ,0,σTL)
文章中还介绍了一种 Banding pattern noise,这种噪声分布建模成高斯分布。
From Voltage to Digital Numbers
最后就是量化噪声,这里的量化噪声建模成均匀分布:
N q ∼ U ( − 1 / 2 q , 1 / 2 q ) N_q \\sim U(-1/2q, 1/2q) Nq∼U(−1/2q,1/2q)
To summarize
所以最终,噪声的分布表示为:
N = K N p + N r e a d + N r + N q N = KN_p + N_read + N_r + N_q N=KNp+Nread+Nr+Nq
分别对应上面的 shot noise,read noise,row noise 以及 quantization noise
Estimating noise parameters
对噪声分布进行建模之后,剩下的就是对模型参数的估计,从噪声模型的表达式来看,需要估计的参数有系统增益 K K K, 散粒噪声 N p N_p Np,读出噪声 N r e a d N_read Nread, 行噪声 N r N_r Nr 及量化噪声 N q N_q Nq
为了估计这些参数,文章中设计了一些实验,拍摄了两种类型的图像,一种是 flat-field images,另外一种是 bias images,其中 flat-field images 就是光照均匀的环境下获取的图像,这样可以估计出 K 值,然后进而估计出图像亮度 I 值,然后再构造一个泊松分布,将噪声添加到 I 上再乘以 K 值,从而模拟 shot noise。
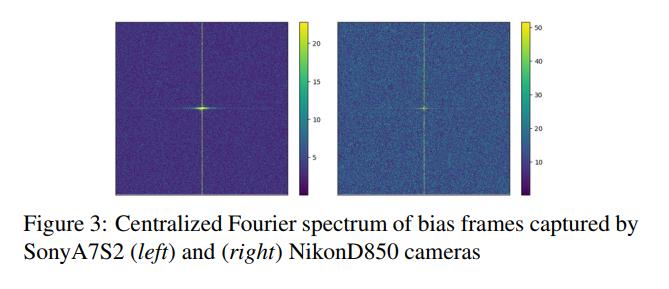
bias images 是另外一种图像,简单来说就是在黑暗的环境下,盖住镜头,拍摄多帧图像,对图像做离散傅里叶变换,可以看到一条明显的竖直的线,这条线和 banding pattern noise 有关,为了分析噪声的分布,可以对图像的每一行求平均值,然后做一个均值,方差的估计,从而估计出 banding pattern noise 的 scale,然后用 bias images 减去 banding pattern noise,用一个统计模型去拟合剩下的残差,最后得到一个联合的参数分布模型:
log ( K ) ∼ U ( l o g ( K ^ m i n ) , K ^ m a x ) log ( σ T L ) ∣ log ( K ) ∼ N ( a T L log ( K ) + b T L , σ ^ T L ) log ( σ r ) ∣ log ( K ) ∼ N ( a r log ( K ) + b r , σ ^ r ) \\log(K) \\sim U (log(\\hatK_min), \\hatK_max) \\\\ \\log(\\sigma_TL)|\\log(K) \\sim \\mathcalN(a_TL \\log(K) + b_TL, \\hat\\sigma_TL) \\\\ \\log(\\sigma_r)|\\log(K) \\sim \\mathcalN(a_r\\log(K) + b_r, \\hat\\sigma_r ) log(K)∼U(log(K^min),K^max)log(σTL)∣log(K)∼N(aTLlog(K)+bTL,σ^TL)log(σr)∣log(K)∼N(arlog(K)+br,σ^r)
其中, U ( ⋅ , ⋅ ) U(\\cdot,\\cdot) U(⋅,⋅) 表示均匀分布, N \\mathcalN N 表示高斯分布。
通过这组参数分布,可以进行噪声的估计,从而模拟真实环境的噪声分布。
以上是关于论文讲解:A Physics-based Noise Formation Model for Extreme Low-light Raw Denoising的主要内容,如果未能解决你的问题,请参考以下文章