ROS2入门之基本介绍
Posted Being_young
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2入门之基本介绍相关的知识,希望对你有一定的参考价值。
论文阅读模块将分享点云处理,SLAM,三维视觉,高精地图相关的文章。公众号致力于理解三维视觉领域相关内容的干货分享,欢迎各位加入我,我们一起每天一篇文章阅读,开启分享之旅,有兴趣的可联系微信dianyunpcl@163.com。
前言
2017年机器人开源操作系统软件ROS 2终于推出首个正式版,新版本命名为“Ardent Apalone”,代号“ardent”。
ROS2是新的ROS版本,相比较ROS1更加接近工业化场景,更加稳定,功能更加丰富。我们在安装学习之前先了解一下ROS2的基础结构。
ROS和ROS2架构区别
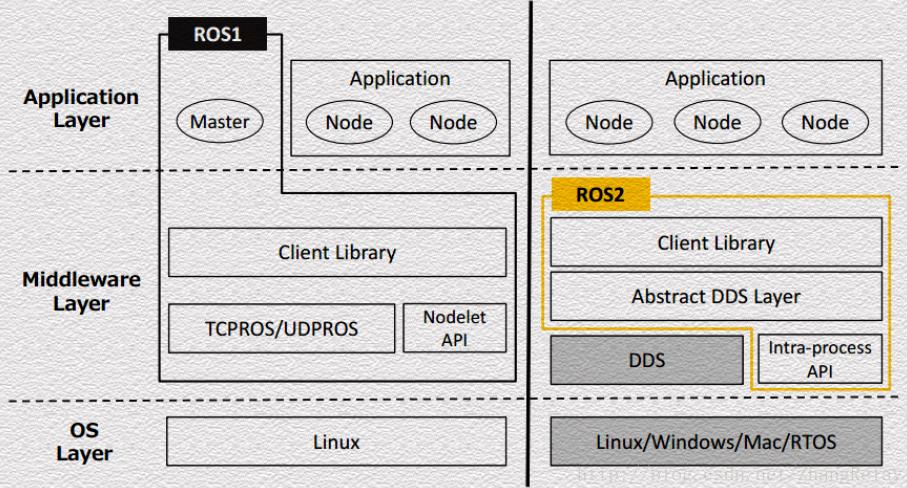
架构图(ROS2中没有了master中心节点了)
ROS的数据发布与订阅
ROS2的数据发布与订阅
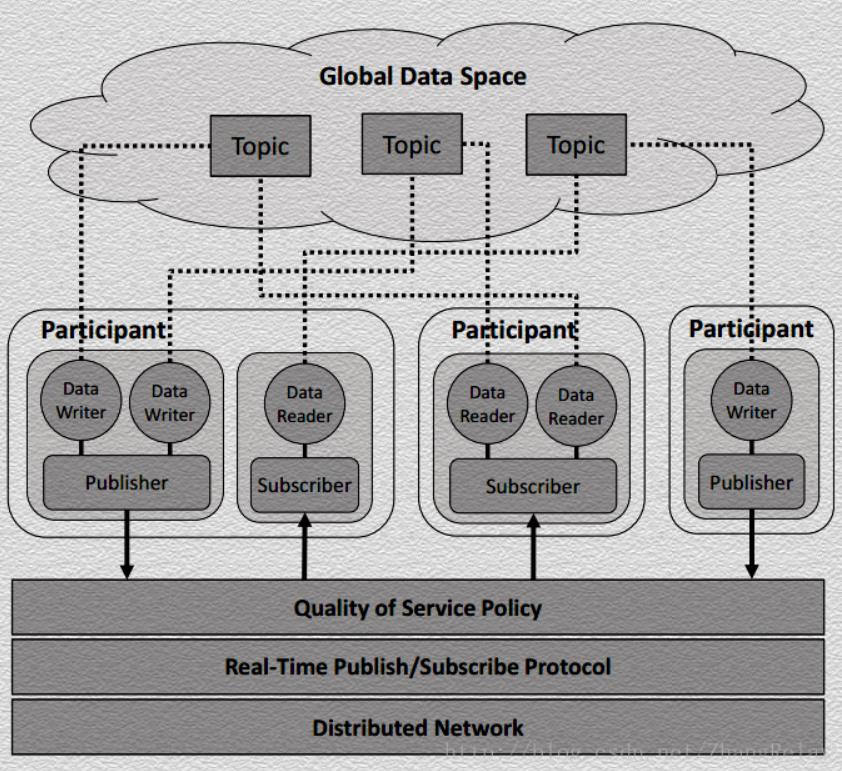
ROS2与DDS的关系
ROS2是建立在以DDS/RTPS为中间件的基础之上的,DDS/RTPS提供了发现(discovery
以上是关于ROS2入门之基本介绍的主要内容,如果未能解决你的问题,请参考以下文章