CUDA中的几种并行计算模型
Posted ithiker
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了CUDA中的几种并行计算模型相关的知识,希望对你有一定的参考价值。
Background
CUDA编程中由于thread space和input space通常是不同的:
- Thread Space最多可以是5D,2D Grid + 3D Block
- Input Space通常是1D,有时也有2D的矩阵等
这就导致了我们需要将inputs映射到threads中去,比如我在《CUDA中线程与数据的对应关系》中所写的,主要就是考虑线程数和数据数下的映射关系。
如果我们有一个1D的Input array, 采用不同的thread space, thread index和input index的对应关系如下:
- 1 block, N threads(1D): 对应的线程索引threadIdx.x
- 1 block, M X N threads(2D): 对应的线程索引blockIdx.y * blockDim.x + threadIdx.x
- N block(1D), M threads(1D): 对应的线程索引blockIdx.x * gridDim.x + threadIdx.x
这里只列举部分情况。
CUDA中的并行计算模型是基于上面的对应关系的,常见的并行计算模型有如下几种:
- Map
- Gather
- Scatter
- Transpose
- Reduce
- Scan
下面逐个介绍这几种模型。
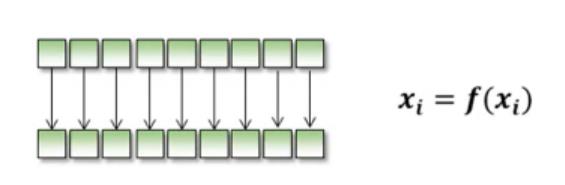
Map
Map就是将某个function作用到输入队列的每一个元素,然后用结果更新该队列:
比如,我们要将某个队列中的每个元素都加10,我们可以写类似这样的代码:
#include <curand.h>
#include <cuda.h>
#include <iostream>
#include <stdio.h>
__global__ void addTen(float* d, int count)
int threadsPerBlock = blockDim.x * blockDim.y * blockDim.z;
int threadPosInBlock = threadIdx.x + blockDim.x * threadIdx.y + blockDim.x * blockDim.y * threadIdx.z;
int blockPosInGrid = blockIdx.x + gridDim.x * blockIdx.y; // grid is always 2D
int threadIndex = blockPosInGrid * threadsPerBlock + threadPosInBlock;
if (threadIndex < count)
d[threadIndex] += 10;
int main()
curandGenerator_t gen;
curandCreateGenerator(&gen, CURAND_RNG_PSEUDO_MTGP32);
curandSetPseudoRandomGeneratorSeed(gen, time(0));
const int count = 123456;
const int size = count * sizeof(float);
float *d;
float h[count];
cudaMalloc(&d, size);
curandGenerateUniform(gen, d, count);
dim3 block(8, 8, 8);
dim3 grid(16, 16);
addTen<<<grid, block>>>(d, count);
cudaMemcpy(h, d, size, cudaMemcpyDeviceToHost);
cudaFree(d);
for (int i = 0; i < 100; ++i)
std::cout << h[i] <<std::endl;
getchar();
return 0;
上面,将会产生0-1之间的随机均匀分布的数字,CUDA代码的作用是在该array中的每个数加10。注意这里用到了CUDA的curand库,因此编译时需要link到curand,如下:
nvcc -o Map Map.cu -lcurand
Gather
Gather “gathers” information from other parts of memory. Scatter “scatters” information to other parts of memory.[1]
Gather就是从内存已有的信息中提取信息,例如由给定array中的某些元素生成一个元素:

比如一般的stencil问题:

如果radius=3, 每个元素是相邻的7个元素之和,实现代码如下:
#include <thrust/device_vector.h>
#define RADIUS 3
#define BLOCKSIZE 32
/*******************/
/* iDivUp FUNCTION */
/*******************/
int iDivUp(int a, int b) return ((a % b) != 0) ? (a / b + 1) : (a / b);
/********************/
/* CUDA ERROR CHECK */
/********************/
#define gpuErrchk(ans) gpuAssert((ans), __FILE__, __LINE__);
inline void gpuAssert(cudaError_t code, const char *file, int line, bool abort=true)
if (code != cudaSuccess)
fprintf(stderr,"GPUassert: %s %s %d\\n", cudaGetErrorString(code), file, line);
if (abort) exit(code);
/**********/
/* KERNEL */
/**********/
__global__ void moving_average(unsigned int *in, unsigned int *out, int N)
__shared__ unsigned int temp[BLOCKSIZE + 2 * RADIUS];
int gindexx = threadIdx.x + blockIdx.x * blockDim.x;
int lindexx = threadIdx.x + RADIUS;
// --- Read input elements into shared memory
temp[lindexx] = (gindexx < N)? in[gindexx] : 0;
if (threadIdx.x < RADIUS)
temp[threadIdx.x] = (((gindexx - RADIUS) >= 0)&&(gindexx <= N)) ? in[gindexx - RADIUS] : 0;
temp[threadIdx.x + (RADIUS + BLOCKSIZE)] = ((gindexx + BLOCKSIZE) < N)? in[gindexx + BLOCKSIZE] : 0;
__syncthreads();
// --- Apply the stencil
unsigned int result = 0;
for (int offset = -RADIUS ; offset <= RADIUS ; offset++)
result += temp[lindexx + offset];
// --- Store the result
out[gindexx] = result;
/********/
/* MAIN */
/********/
int main()
const int N = 55 + 2 * RADIUS;
const unsigned int constant = 4;
thrust::device_vector<unsigned int> d_in(N, constant);
thrust::device_vector<unsigned int> d_out(N);
moving_average<<<iDivUp(N, BLOCKSIZE), BLOCKSIZE>>>(thrust::raw_pointer_cast(d_in.data()), thrust::raw_pointer_cast(d_out.data()), N);
gpuErrchk(cudaPeekAtLastError());
gpuErrchk(cudaDeviceSynchronize());
thrust::host_vector<unsigned int> h_out = d_out;
for (int i=0; i<N; i++)
printf("Element i = %i; h_out = %i\\n", i, h_out[i]);
return 0;
Scatter
Scatter正好和Gather相反,这里有一个Scatter的比较好的解释:
When each thread needs to write its output in a different or multiple places we call this the scatter operation.
当需要把一个元素写到不同的位置或者写到多个位置时,就是scatter.
参考[3], 这里有一个用thrust实现的scatter的例子:
#include <thrust/scatter.h>
#include <thrust/device_vector.h>
#include <thrust/execution_policy.h>
#include <vector>
#include <iostream>
int main()
int values[10] = 1, 0, 1, 0, 1, 0, 1, 0, 1, 0;
thrust::device_vector<int> d_values(values, values + 10);
// scatter all even indices into the first half of the range, and odd indices vice versa
int map[10] = 0, 5, 1, 6, 2, 7, 3, 8, 4, 9;
thrust::device_vector<int> d_map(map, map + 10);
thrust::device_vector<int> d_output(10);
thrust::scatter(thrust::device, d_values.begin(), d_values.end(), d_map.begin(), d_output.begin());
std::vector<int> result(d_output.size());
thrust::copy(d_output.begin(), d_output.end(), result.begin());
for(auto& e : result)
std::cout << e << std::endl;
Thurst 是CUDA的原生库,编译时不需要做额外的链接,如下即可:
nvcc -std=c++11 -o Scatter Scatter.cu
Transpose
Transpose通常涉及到矩阵的转置。
比如,我们有一个图片,它的pixel值信息是按行排列存储的:

那么,我们把它放到CUDA的内存中,它的排布是这样的:

但是,通常,我们使用图片时,可能采用按列顺序读取的方式,比如先第一列1,5;然后第二列2,6,…,最后4,8
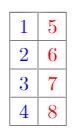
那么,根据内存读取优化原则,相邻读取的元素在内存中相邻排布才有最好的性能,那么,我们实际希望的GPU内存排布是:

Transpose是一种特殊的scatter, 实现这个需求只需要把上面的代码稍微修改即可:
#include <thrust/scatter.h>
#include <thrust/device_vector.h>
#include <thrust/execution_policy.h>
#include <vector>
#include <iostream>
int main()
int values[8] = 1, 2, 3, 4, 5, 6, 7, 8;
thrust::device_vector<int> d_values(values, values + 8);
// scatter first half to the dest even index and second half to the dest odd indices
int map[8] = 0, 2, 4, 6, 1, 3, 5, 7;
thrust::device_vector<int> d_map(map, map + 8);
thrust::device_vector<int> d_output(8);
thrust::scatter(thrust::device, d_values.begin(), d_values.end(), d_map.begin(), d_output.begin());
std::vector<int> result(d_output.size());
thrust::copy(d_output.begin(), d_output.end(), result.begin());
for(auto& e : result)
std::cout << e << std::endl;
Reduce
Reduce就是一种分而治之(divide and conquer)的方法,比如下面的求和:

在CUDA中可以采用如下的并行算法:
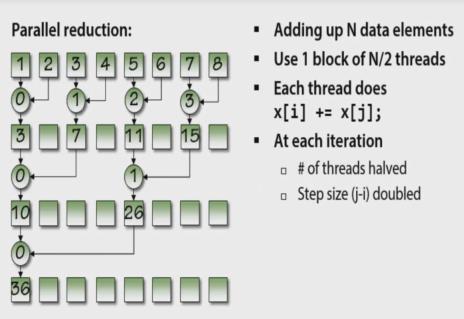
初始时,thread number是data size的一半,每个迭代,一个线程负责两个数的相加;每过一个迭代,data size进一步减半,因而需要使用的线程也减半。
对应的核代码为:
#include <cuda.h>
#include <iostream>
#include <stdio.h>
__global__ void sum(int* d)
int tid = threadIdx.x;
for (int threadCount = blockDim.x, stepSize = 1; threadCount > 0; threadCount /= 2, stepSize *= 2)
if (tid < threadCount)
int lhsIndex = tid * stepSize * 2;
int rhsIndex = lhsIndex + stepSize;
d[lhsIndex] += d[rhsIndex];
int main()
const int count = 8;
const int size = count * sizeof(int);
int *d;
int h[count] = 1, 2, 3, 4, 5, 6, 7, 8;
cudaMalloc(&d, size);
cudaMemcpy(d, h, size, cudaMemcpyHostToDevice);
sum<<<1, count / 2>>>(d);
cudaMemcpy(h, d, size, cudaMemcpyDeviceToHost);
cudaFree(d);
for (int i = 0; i < count; ++i)
std::cout << h[i] <<std::endl;
getchar();
return 0;
程序输出为:
36
2
7
4
26
6
15
8
第一个数为我们想要的sum, 对比上图和程序,我们发现thread 0干的活最多,因为tid最小为0,threadCount不断减半,所以最后结果写到了d[0]处。
Scan
当输出队列的第n个元素有输入队列的前n个元素决定时,称这种计算模式为scan.
当f操作为求和时:
| input | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| output | 1 | 3 | 6 | 10 | 15 |
这里,我们仍然采用1维的grid, 采用N-1个线程,index为0的线程仍然干最多的活:

#include <cuda.h>
#include <iostream>
#include <stdio.h>
__global__ void scanSum(int* d)
int tid = threadIdx.x;
for (int threadCount = blockDim.x, stepSize = 1; threadCount > 0; stepSize *= 2)
if (tid < threadCount)
d[tid + stepSize] += d[tid];
threadCount -= stepSize;
int main()
const int count = 5;
const int size = count * sizeof(int);
int *d;
int h[count] = 1, 2, 3, 4, 5;
cudaMalloc(&d, size);
cudaMemcpy(d, h, size, cudaMemcpyHostToDevice);
scanSum<<<1, count - 1>>>(d);
cudaMemcpy(h, d, size, cudaMemcpyDeviceToHost);
cudaFree(d);
for (int i = 0; i < count; ++i)
std::cout << h[i] <<std::endl;
getchar();
return 0;
Reference:
- https://developer.nvidia.com/gpugems/gpugems2/part-iv-general-purpose-computation-gpus-primer/chapter-31-mapping-computational
- https://developer.nvidia.com/gpugems/gpugems3/part-vi-gpu-computing/chapter-39-parallel-prefix-sum-scan-cuda
- https://blog.csdn.net/seamanj/article/details/82976687
- https://thrust.github.io/doc/group__scattering_gac1b33a02dd67cf9c8b3b3aa05c881a37.html
- https://docs.nvidia.com/cuda/thrust/index.html
以上是关于CUDA中的几种并行计算模型的主要内容,如果未能解决你的问题,请参考以下文章