智能网联汽车云控系统第5部分:平台服务场景规范
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了智能网联汽车云控系统第5部分:平台服务场景规范相关的知识,希望对你有一定的参考价值。
1 范围
本文件规定了智能网联汽车云控系统的系统架构、服务场景、场景服务方式、系统相关设备要求、通信要求、安全要求。
本文件适用于智能网联云控场景库与测试服务。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
YD/T 3957 基于LTE的车联网无线通信技术 安全证书管理系统技术要求
YD/T 3594-2019 基于LTE的车联网通信安全技术要求
T/CSAE XXXX-XXXX 智能网联汽车云控系统 第1部分 系统组成及基础平台架构
T/CSAE XXXX-XXXX 智能网联汽车云控系统 第2部分 车云数据交互规范
3 术语和定义
下列术语和定义适用于本文件。
3.1 车路云一体化融合控制系统 system of coordinated control by vehicle-road-cloud integration,SCCVRCI
利用新一代信息与通信技术,将人、车、路、云的物理层、信息层、应用层连为一体,进行融合感知、决策与控制,可实现车辆行驶和交通运行安全、效率等性能综合提升的一种信息物理系统。
3.2 车路云融合控制 coordinated control by vehicle-road-cloud
利用车路云一体化融合控制系统(云控系统)的融合感知、协同决策与协同控制能力,对车辆行驶和交通运行进行辅助、增强或接管,实现安全、效率等性能的综合提升。
3.3 云控平台 cloud control platform
云控平台由云控基础平台以及云控应用组成。云控基础平台结合地图、交管、气象和定位等平台的相关数据,对汇聚于云控基础平台的车辆和道路交通动态信息按需进行综合处理后,以标准化分级共享的方式支撑不同时延要求下的云控应用需求,从而形成面向智能网联汽车产业实际应用的云控平台,为车辆增强安全、节约能耗以及提升区域交通效率提供服务。
3.4 云控基础平台 cloud control basic platform
云控基础平台由边缘云、区域云与中心云三级云组成,形成逻辑协同、物理分散的云计算中心。云控基础平台以车辆、道路、环境等实时动态数据为核心,结合支撑云控应用的已有交通相关系统与设施的数据,为智能网联汽车与产业相关部门和企业提供标准化共性基础服务。
3.5 协同应用 collaborative application
云控基础平台上运行的基于云控系统能力实现或辅助实现融合感知、协同决策与协同控制的应用(功能)。
3.6 协同接管 collaborative takeover
通过网联方式下发数据,提示车上驾驶人接管车辆,或人工或自动地远程控制车辆实现接管。
4 系统架构
车路云一体化融合控制系统由智能网联汽车、交通参与者、路侧基础设施、云控基础平台、云控应用平台、保证系统发挥作用的相关支撑平台以及贯穿整个系统各个部分的通信网等六个部分组成,系统组成与基础平台架构见 T/CSAE 《智能网联汽车云控系统 第 1 部分 系统组成及基础平台架构》,系统架构图如图 1 所示。

4.2 各类协同应用应分别部署在云控基础平台的三级云上。
5 服务场景
5.1 功能类别
结合车路云融合控制的功能要求,基于应用服务方式,面向网联汽车的云控应用应分为4个类别,云控应用类别见T/CSAE 《智能网联汽车云控系统 第1部分 系统组成及基础平台架构》中的5.3。车辆网联化等级参见附录A。
5.2 协同应用
5.2.1 用途类别
根据用途,协同应用宜分为下列三类:
a) 智能网联驾驶协同应用与智能交通协同应用。此类应用不区分运载业务,而是将智能网联汽车视为通用运载工具,进而对车辆行驶与交通运行进行辅助和优化;
b) 基于交通全要素数字映射形成的大数据进行离线分析与学习的应用。例如通过构建人工智能算法,结合大数据训练生成风险预测模型;通过对车辆历史数据的分析,量化车辆的风险水平;
c) 将智能网联汽车应用于特定领域的商业运营时与车辆行驶过程相关的应用。例如园区、城市与高速公路环境的自动驾驶载客与物流的应用,救护、路政等公共服务中车辆相关的应用。
5.2.2 场景类别
5.2.2.1 面向单车的协同应用
5.2.2.1.1 此类场景下的系统功能的部署位置、功能类型与应用场景要求见表 1。
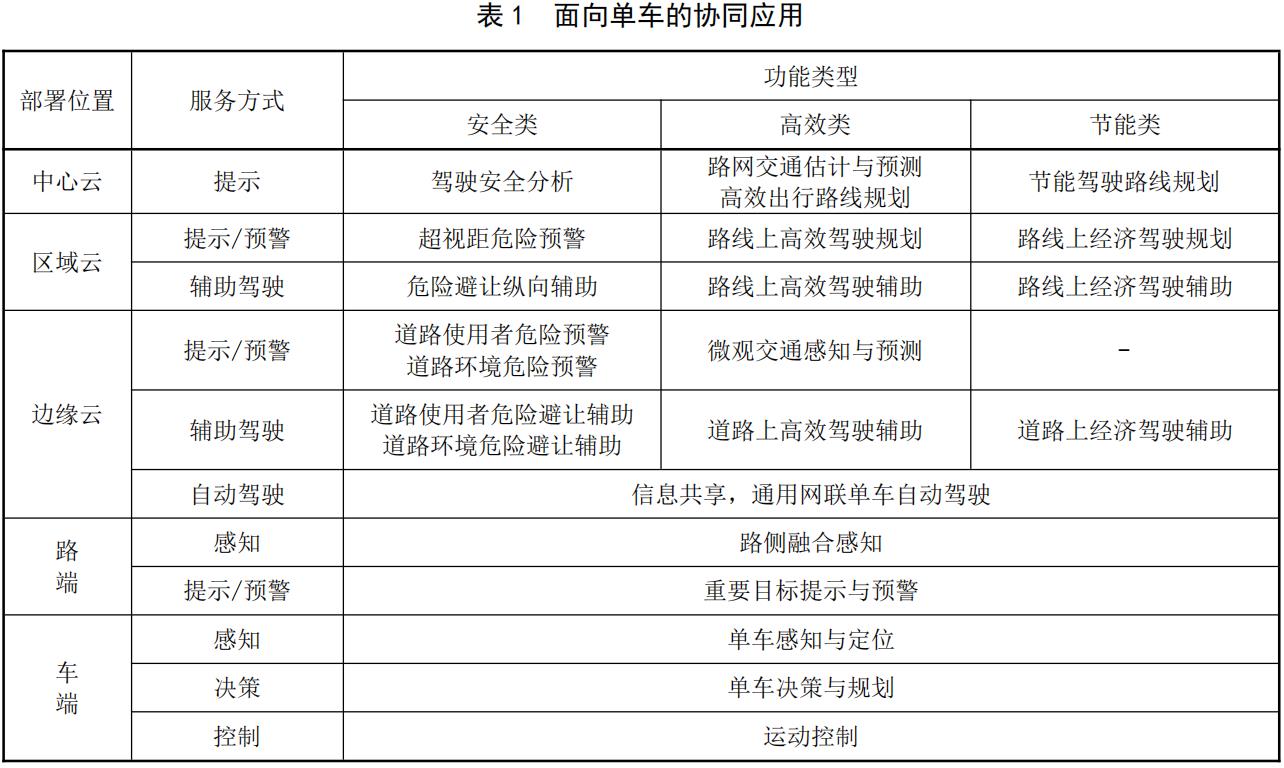
5.2.2.1.2 中心云应提供宏观驾驶任务级应用功能,服务方式为提示。功能类型包括下列内容:
a) 安全类应用:驾驶安全分析,分析单车驾驶安全能力;
b) 高效类应用:路网交通感知与预测,为单车提供当前或未来的路网宏观交通流信息;
c) 高效出行路线规划,应为单车规划通行效率高的全局行驶路线建议;
d) 节能类应用:节能驾驶路线规划,为单车规划经济性好的全局行驶路线建议。
5.2.2.1.3 区域云应提供交通相关中观准实时应用功能,服务方式为提示/预警与辅助驾驶。功能类型包括下列内容。
a) 安全类应用包括:
1) 超视距危险预警,为单车提供自车感知能力外的危险预警信息,例如 53-2020 里预警功能在超视距范围实现;
2) 危险避让纵向控制,为单车提供针对超视距道路危险的避让决策、规划建议指令。
b) 高效类应用包括:
1) 路线上高效驾驶规划,为单车提供面向行驶效率的重点考虑交通流的路线全程车速或车道规划建议指令;
2) 路线上高效驾驶辅助,为单车提供面向行驶效率的重点考虑交通流的可用于车辆控制的准实时路线范围车速或车道规划建议指令。
c) 节能类应用包括:
1) 路线上经济驾驶规划,为单车提供面向经济性的重点考虑交通流的路线范围车速或车道规划建议指令;
2) 路线上经济驾驶辅助,为单车提供面向经济性的重点考虑交通流的可用于车辆控制的准实时路线范围车速或车道规划建议指令。
5.2.2.1.4 边缘云应提供目标级微观实时应用功能,服务方式为提示/预警、辅助驾驶与自动驾驶。功能类型包括下列内容。
a) 安全类应用包括:
- 道路使用者危险预警与道路环境危险预警,为单车提供来源于道路使用者或道路环境的危险情况的预警信息,例如 T/CSAE 53-2020 中的前向碰撞预警、交叉路 口碰撞预警、盲区预警/变道预警、逆向超车预警、紧急制动预警、车辆失控预警、闯红灯预警、弱势交通参与者碰撞预警、左转辅助、异常车辆提醒、道路危险状况提示等场景功能,T/CSAE157-2020 中的弱势交通参与者安全通行功能;
2) 道路使用者危险避让辅助与道路环境危险避让辅助,为单车提供避让危险的用于车辆控制的实时决策、规划或控制建议指令。
b) 高效类应用包括:
1) 微观交通感知与预测,为单车提供当前或未来的交通目标数据,例如 T/CSAE 53-2020 中的前方拥堵提醒场景功能、紧急车辆提醒;
2) 道路上高效驾驶辅助,在局部道路范围,为单车提供面向行驶效率的基于交通目标的用于车辆控制的车速或车道规划与控制建议指令,例如 T/CSAE 53-2020 中的绿波车速引导场景功能。
c) 节能类应用:道路上经济驾驶辅助,在局部道路范围,为单车提供面向经济性的基于交通目标的用于车辆控制的车速或车道规划与控制建议指令。
d) 跨越 3 个功能类型的自动驾驶应用包括:
1) 信息共享,为车辆提供其他车载、路侧或云端等来源的感知或相关数据,例如 T/CSAE157-2020 中的感知信息共享功能;
2) 通用网联单车自动驾驶,为单车提供面向通用行驶目标的特定运行设计域的自动驾驶实时网联控制建议指令。
5.2.2.1.5
路端应提供实时感知应用功能,服务方式为感知、提示/预警。为单车提供基于路侧传感器融合感知的道路使用者目标数据,提供基于感知的重要道路参与者目标提示与预警数据。
5.2.2.1.6 车端应接受云端或路侧的应用下发数据,根据应用场景及应用服务方式,做出感知、决策与控制环节的所需响应,实现网联数据作用于单车驾驶过程,实现应用闭环。
5.2.2.2 面向多车与交通的协同应用
5.2.2.2.1 此类场景下的系统功能的部署位置、功能类型与应用场景要求见表 2。
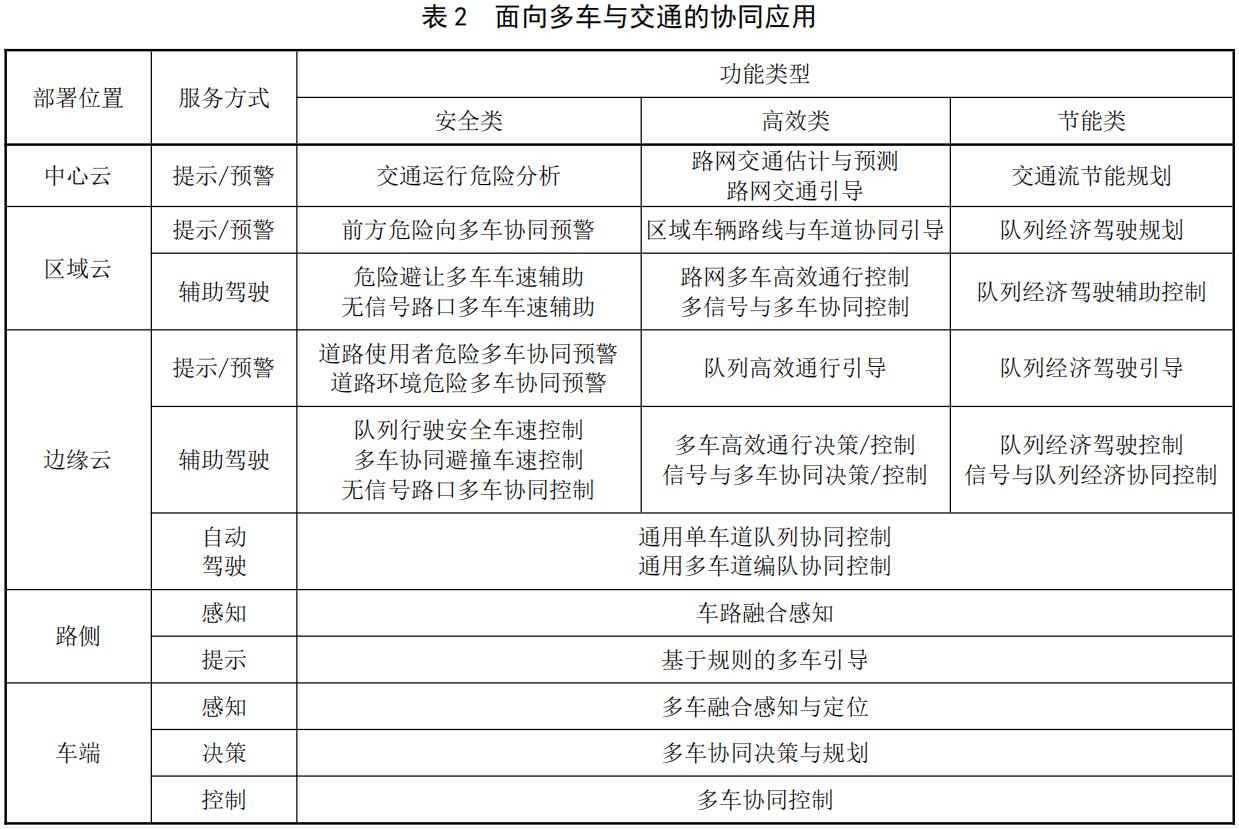
5.2.2.2.2 中心云应提供宏观驾驶任务级应用功能,服务方式为提示。功能类型包括下列内容:
a) 安全类应用包括:交通运行危险分析,为多车提供基于宏观交通数据的全域范围交通危险分析数据;
b) 高效类应用包括:路网交通估计与预测,为多车提供考虑网联车交互行为的当前或未来的路网交通流数据;路网交通引导,为多车提供协同式的路网交通宏观引导建议;
c) 节能类应用包括:交通流节能规划,为多车提供协同式的面向经济性的宏观交流级通行规划建议。
5.2.2.2.3 区域云应提供交通相关中观准实时应用功能,服务方式为提示/预警与辅助驾驶。功能类型包括下列内容。
a) 安全类应用包括:
1) 前方危险向多车协同预警,为多车提供超视距的考虑交通流作用的危险预警数据;
2) 危险避让多车车速辅助,为多车提供考虑车间交互的协同避让危险车速规划建议指令;
3) 无信号路口多车车速辅助,为多车提供考虑路口安全的通行速度建议指令。
b) 高效类应用包括:
1) 区域车辆路线与车道协同引导,为多车提供考虑多车交互的面向行驶效率的车道级路线规划建议指令;
2) 路网多车高效通行控制,为多车提供考虑多车交互的面向路网范围交通效率的车速与车道协同控制建议指令;
3) 多信号与多车协同控制,为多车提供考虑多车交互的与多个路口信号优化协同的最优通行车速与车道控制建议指令。
c) 节能类应用包括:
1) 队列经济驾驶规划,为队列中各车提供面向经济性的重点考虑交通流的路线范围车速或车道规划建议指令;
2) 队列经济驾驶辅助控制,为队列中各车提供面向经济性的重点考虑交通流的可用于车辆控制的准实时路线范围车速或车道控制建议指令。
5.2.2.2.4 边缘云应提供目标级微观实时应用功能,服务方式为提示/预警、辅助驾驶与自动驾驶。功能类型包括下列内容。
a) 安全类应用包括:
1) 道路使用者危险向多车协同预警与道路环境危险向多车协同预警,为多车提供来源于道路使用者或道路环境的考虑多车行为交互的危险情况的预警信息;
2) 队列行驶安全车速控制,为队列中多车提供面向安全需求的队列行驶车速控制指令;多车协同避撞车速控制,为多车提供协同避让危险的车速控制指令;
3) 无信号路口多车协同控制,为多车提供考虑路口安全的通行速度与车道控制指令。
b) 高效类应用包括:
1) 队列高效通行引导,为队列各车提供面向行驶效率的队列行驶车速与车道规划建议指令;
2) 多车高效通行决策/控制,为多车提供考虑车辆交互的面向行驶效率的车速与车道决策或控制建议指令,例如 T/CSAE 157-2020 中的协作式变道、协作式车辆汇入、协作式交叉路口通行、协作式优先车辆通行功能;
3) 信号与多车协同决策/控制,为多车提供考虑多车交互的与单一路口信号优化协同的最优通行车速与车道决策或控制建议指令。
c) 节能类应用包括:
1) 队列经济驾驶引导,为队列各车提供面向经济性的队列行驶车速与车道规划建议指令;
2) 队列经济驾驶控制,为队列各车提供面向经济性的队列行驶车速与车道控制建议指令;
3) 信号与队列经济协同控制,为队列各车提供面向经济性的与路口信号优化协同的队列行驶车速与车道规划建议指令。
d) 跨越 3 个功能类型的自动驾驶应用包括:
1) 通用单车道队列协同驾驶,为队列各车提供面向通用行驶目标的特定运行设计域的单车道车队自动驾驶实时网联控制建议指令;
2) 通用多车道编队协同驾驶,为编队各车提供面向通用行驶目标的特定运行设计域的多车道车队自动驾驶实时网联控制建议指令,例如 T/CSAE 157-2020 中的协作式车辆编队管理功能。
5.2.2.2.5 路侧应提供实时感知应用功能,服务方式为感知、提示。为单车提供基于路侧传感器与车端数据融合感知的道路使用者目标数据,提供路侧融合感知下基于规则的多车引导建议指令。
5.2.2.2.6 车端应接受云端或路侧的应用下发数据,根据应用场景及应用服务方式,考虑多车协同其他车辆情况,做出感知、决策与控制环节的所需响应,实现网联数据作用于多车与车路协同驾驶过程,实现应用闭环。
5.2.2.3 面向交通设备的协同应用
5.2.2.3.1 此类场景下的系统功能的部署位置、功能类型与应用场景要求见表 3。

5.2.2.3.2 中心云主要提供基于大数据的交通设备优化训练,应用包括:
a) 安全场景交通信号优化训练,通过平台大数据改进安全相关紧急场景下交通信号优化策略;
b) 高效通行交通信号优化训练,通过平台大数据改进通常场景下面向高效通行的交通信号优化策略。
5.2.2.3.3 区域云主要提供交通信号控制应用。
a) 安全类应用包括:
1) 交通管制信号控制,考虑交通管制需求对交通信号进行临时特殊控制;
2) 针对危险车辆的信号控制,面向危险车辆处置对交通信号进行临时特殊控制。
b) 高效类应用包括:
1) 区域信号控制,面向交通优化对路网区域内交通信号进行协同优化控制,例如 157-2020中的动态车道管理功能;
2) 优先通行信号控制,面向特定车辆优先通行需求对交通信号进行临时控制。
6 场景服务方式
6.1 融合感知
6.1.1 在融合感知服务中,云控平台应实时接收路侧设备与网联车辆的上传数据,识别分析出影响车辆行驶安全的道路信息。
6.1.2 云控平台应将道路信息实时发送给网联车辆,车辆可通过 HMI 提示驾驶人,或将数据传输给驾驶辅助或自动驾驶系统作用于车辆执行。
6.1.3 云控平台发送的影响车辆行驶安全的交通和道路信息包括但不限于下列内容:
——道路类型:区域、城市道路、公路、乡村道路、其他道路、停车区域等;
——道路表面:材质、道路表面、道路几何、车道特征、道路边缘、道路交叉等;
——道路设施:交通控制设施、道路基础设施、特殊设施、道路临时设施等;
——目标物:机动车、非机动车、行人、动物、其他障碍物等;
——交通状态:车道交通流速度、密度、流量,路口排队长度、转向流量等;
——数字信息:无线通信状态、定位信号状态等。
6.2 协同决策
6.2.1 在协同决策服务中,云控平台出于安全、效率等目的,在特定场景中为网联车辆实时计算。
6.2.2 云控应用平台应将计算出的决策建议实时发送给车辆,车辆能够通过 HMI 提示驾驶人,或将数据传输给驾驶辅助或自动驾驶系统作用于车辆执行。
6.2.3 协同决策服务实时发送给车辆的决策建议内容应符合 T/CSAE XXXX《能网联汽车云控系统 第 2部分 车云数据交互规范》中 8.7 的规定,包括但不限于下列内容:
——速度建议:指示车辆按照指定的速度行驶、或执行加减速;
——紧急停车建议:紧急情况下,指示车辆紧急停车;
——停车建议:指示车辆到指定的位置停车;
——跟车行驶建议:指示车辆跟随前方车辆行驶,保持固定车距;
——换道建议:指示车辆进行换道,设定目标车道、变道后速度、动作时间等;
——目的地建议:指示车辆在某个时间点前后的时段,到达目的地,停车等待;
——避让建议:指示车辆采取紧急制动或换道等方式避让前方危险。
6.3 协同规划
在协同规划服务中,云控平台应实时给网联车辆提供协同规划信息,包括全局路径规划和局部路径规划。在全局路径规划中,云控平台实时生成路网中道路级或车道级的全局路径规划。在局部路径规划中,云控平台实时生成轨迹点。
6.4 协同接管
云控平台协同接管服务包括协作式接管和提示接管。
——协作式式接管是当车辆遇到无法处理的情况时,向平台发送协同接管请求,平台接到请求后立刻开始协同接管;
——提示接管是平台接收到车端实时上传的状态信息,主动发现车辆异常并发出报警信号提醒人工接管。
7 系统相关设备要求
7.1 云控平台要求
云控平台应满足下列要求:
——具备车辆、基础设施、交通环境等领域基础数据融合功能,能够合理规划车端路径、远程接管车辆的功能,提供高可靠、高并发、低时延、超大带宽的无线通信功能和计算服务;
——具备场景信息的融合分析功能,构建车辆作业模型,面向不同应用场景提供作业调度、路径规划、联合决策和协同控制,能够实现远程驾驶、自动驾驶的业务管理,同时作为应用总入口,承接各类信息回传和指令下发,作为业务规划网络路径;
——能为单车感知与决策控制提供有效信息,在现有车路协同基础上实现对所有交通参与者的全域全时自主控制,同时与其他行业服务与管理平台进行信息交互,实现对车辆与交通系统的多维跨领域的数据协同。
——从数据输入平台到计算结果数据输出平台,不含应用算法逻辑计算用时,云控平台底层时延在 99.99%情况下小于 50 ms。
7.2 车端设备要求
车端设备包括:OBU、定位设备、传感器、天线。应满足下列要求:
——OBU:具备车辆运动状态获取、行车环境信息感知、车辆定位信息获取、安全报警与预警,能提供超低时延、超高可靠、超大带宽的无线通信和边缘计算服务等功能,能够通过信息获取、信息交互、事故隐患提示等等方式,在车辆终端拓宽视野、增加行车环境和车辆运行状态感知,并解算出典型车路协同应用需要的底层信息,通过信息交互传递至路侧单元;
——定位设备:能够提供车辆的位置、方向、速度和时间等信息,定位精度达到车道级,位置误差小于 1.5 m;
——天线:能够实现射频信号的接收和发送;
——传感器:能够感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,例如摄像头、激光雷达、毫米波雷达等。
7.3 路侧设备要求
路侧设备包括C-V2X RSU设备、路侧感知设备、路侧计算设备、路侧气象设备和路侧道路环境检测设备等。应满足下列要求。
——C-V2X RSU 设备:提供车路通信能力,建立路侧、云端与车端的通信链路。
——路侧视频设备:能够同时提供全景与特写画面,兼顾全景与细节,实现区域入侵、越界等行为的检测等功能;包括高清摄像机、枪型摄像、全景摄像机、视频雷达一体机等。
——路侧毫米波雷达:能够对道路上行驶的车辆、行人、动物、抛洒物体等进行实时跟踪定位检测,并及时将所感知的路况信息、交通状态信息、车辆实时信息分析汇总后通过车路协同通信设备与道路上行驶车辆、自动驾驶车辆或无人驾驶车辆进行数据交互,来满足车辆实现全速智能驾驶的定位要求。
——路侧激光雷达:能够通过对道路的完整扫描,得到基于点云数据的道路动态环境 3D 重建,将道路信息,包括车辆、行人、非机动车及其它物体全部纳入到 V2X 的数据网络,再利用 RSU向周边或者更远距离接近的车辆进行广播。
——路侧边缘计算(RCU)设备需具备下列功能:
多设备连接能力,接入摄像头、毫米波雷达、激光雷达等传感器,RSU,交通控制设备(交通信号灯、情报牌等),同时向上连接云平台;
感知能力与多传感器融合能力,比如摄像头、毫米波雷达与激光雷达的感知与感知融合;
具备C-V2X相关协议处理能力,作为车与云之间的通信中转节点起到预警目的。
——路侧气象设备:由气象传感器、气象数据采集仪和计算机气象软件三部分组成,能够同时监测大气温度、大气湿度、风速、风向、气压、雨量、能见度等气象要素。
——路侧道路环境监测设备:由路面状况传感器、环境数据采集仪和通讯模块等部分组成,能够监测实时路面状况,包括路面温度、湿滑程度、积水厚度、覆冰厚度、积雪厚度等。
——对感知目标定位的最大纵向误差小于 3 m,最大横向误差小于 1.5m,感知与融合用时小于 200ms。
8 通信要求
8.1 一般要求
通信系统应低时延、高可靠(参数要求),通信设备能实现应用功能所需的通信协议。
8.2 车云通信要求
8.2.1 通信方式
车端应具备与云端的无线通信能力,车云通信支持车端将自身数据发送给云端,云端将协同应用数据下发给车端。
8.2.2 基本性能要求
车云通信应具备以下基本性能要求:
——车速范围 0 km/h~140 km/h;
——通信距离≥200 m;
——数据更新频率≥4 Hz;
——往返通信延迟≤100 ms。
8.2.3 数据交互需求
车云通信的车端上报数据交互需求宜参考表4。
表 4 车云通信中车端上报数据需求

8.3 路云通信要求
8.3.1 通信方式
路侧设备与云端应具备通信能力。路云通信支持路侧设备上报路侧感知结果与连接路侧(RSU)车辆的上报数据,云端向路侧下发应用相关数据或下发经由路侧发给车辆的数据。
8.3.2 基本性能要求
路云通信应具备以下基本性能要求:
——数据更新频率≥10 Hz;
——路侧与云端通信延迟≤10 ms。
8.3.3 数据交互需求
路云通信的路侧上报数据需求宜参考表5。

8.4 车路通信要求
8.4.1 通信方式
路侧设备与车端应具备通信能力,采用单播、组播或广播方式进行交互。车路通信支持车端向路侧上报自身数据,路侧向车端下发路侧计算数据或云端经路侧下发到车的数据。
8.4.2 基本性能要求
车路通信应具备以下基本性能要求:
——车速范围:0 km/h~140 km/h;
——无线通信距离≥200 m;
——通信频率≥5 Hz;
——往返通信延迟≤100 ms。
8.4.3 数据交互需求
车路通信的车端上报数据需求宜参考表6。

8.5 车车通信要求
车端设备接收周围车辆发送的信息,调整自身运行状态或保持不变。
8.5.1 通信方式
车车之间应支持短程无线通信方式。
8.5.2 基本性能要求
车车通信应具备以下基本性能要求:
——车速范围 0 km/h~140 km/h;
——通信距离≥200 m;
——数据更新频率≥5 Hz;
——无线通信延迟≤50 ms。
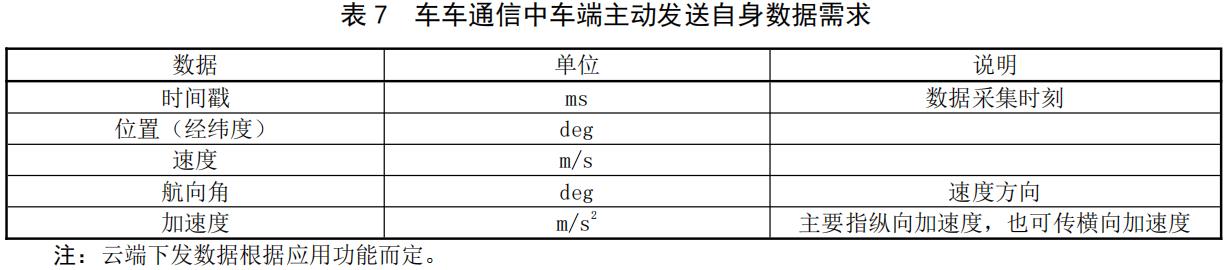
8.5.3 数据交互需求
车车通信的车端主动发送自身数据需求宜参考表7。
9 安全要求
设备和安全证书管理符合YD/T 3957《基于LTE的车联网无线通信技术 安全证书管理系统技术要求》,通信安全符合YD/T 3594-2019《基于LTE的车联网通信安全技术要求》
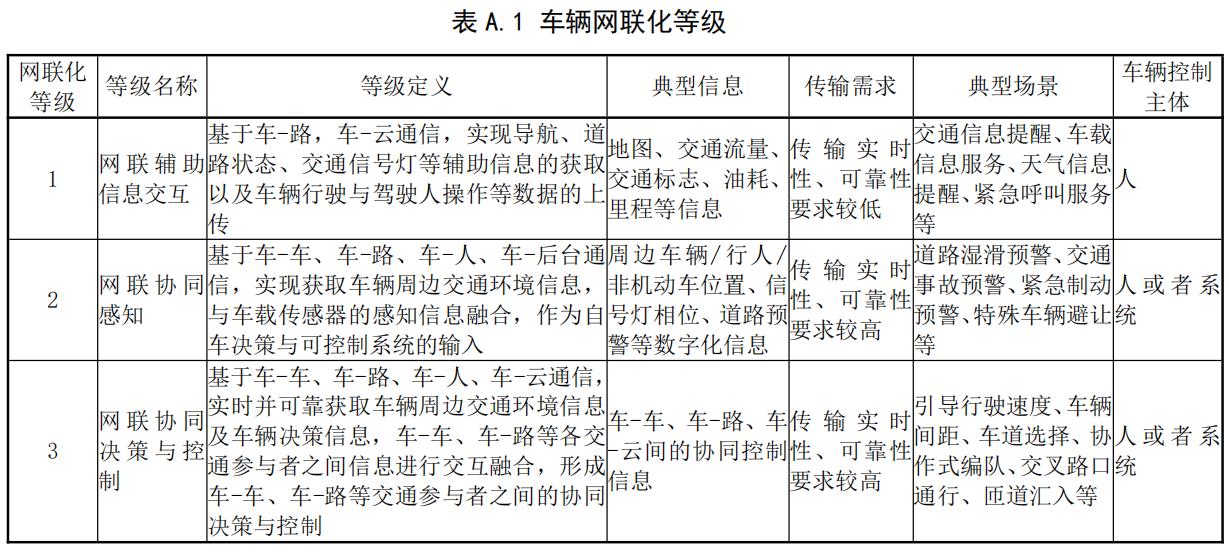
附 录 A(资料性)车辆网联化等级
参考《智能网联汽车技路线图2.0》,车辆网联化等级划分见表A.1。
以上是关于智能网联汽车云控系统第5部分:平台服务场景规范的主要内容,如果未能解决你的问题,请参考以下文章