TWEN-ASR ONE 语音识别系列教程--- GPIOADCPWM的使用
Posted 初五霸
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了TWEN-ASR ONE 语音识别系列教程--- GPIOADCPWM的使用相关的知识,希望对你有一定的参考价值。
TWEN-ASR ONE 语音识别系列教程(2)— GPIO、ADC、PWM的使用
提示:作者使用 TWEN-ASR ONE V1.0开发板进行开发学习。
文章目录
前言
通过《TWEN-ASR 语音识别系列教程(1)—运行第一个程序》文章,我们学习了如何编写一个TWEN-ASR程序、下载程序、调试程序。从上文可知,TWEN-ASR ONE开发板引脚丰富,引脚主要功能有GPIO、ADC、PWM、 UART、IIC、SPI。本文将介绍TWEN-ASR ONE的GPIO、ADC、PWM使用。 主要内容有:
- TWEN-ASR GPIO读写操作;
- TWEN-ASR ADC获取当前电压值;
- TWEN-ASR 根据ADC的值,使用PWM调节红灯的亮度。
一、TWEN-ASR ONE GPIO读写操作
1.1 GPIO 使用说明
了解GPIO使用前,先了解TWEN-ASR ONE芯片的一些信息,如下图所示芯片引脚信息图。
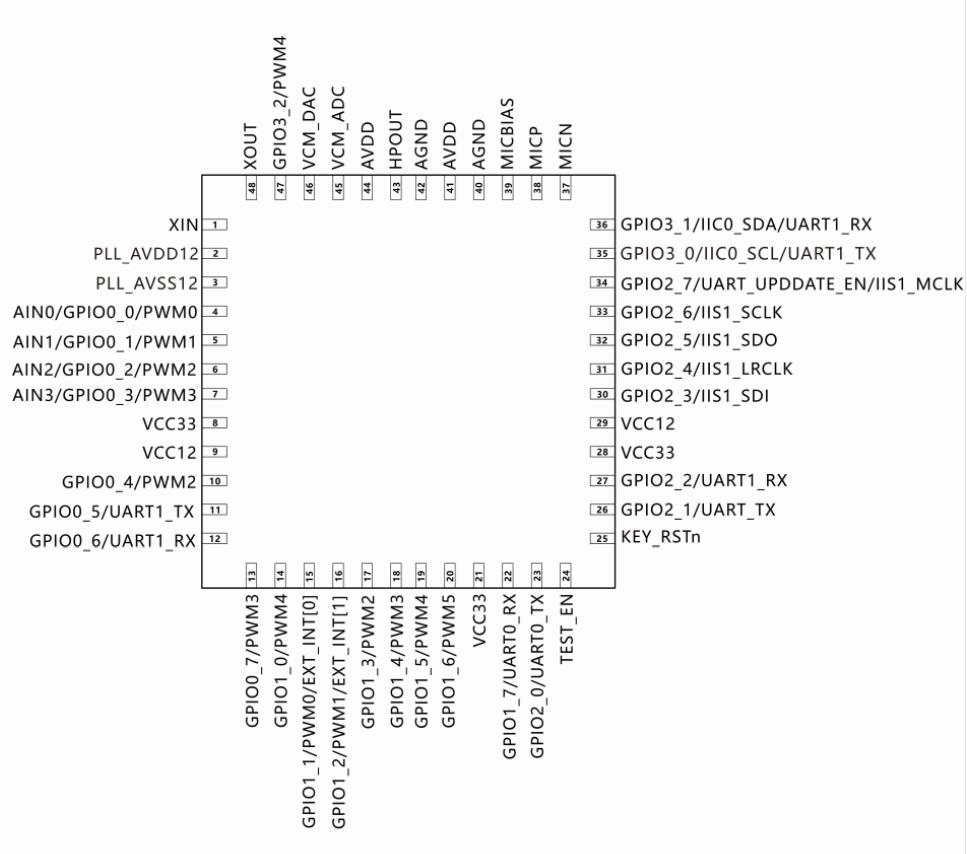
TWEN-ASR GPIO可支持27个GPIO口(IO功能复用)、每个GPIO口可配置中断功能、支持两路带滤波功能外部中断。因为IO功能复用,所以GPIO工作前需要选择引脚功能。当然如果使用默认的话,可以不设置。 例如P0_0引脚功能[1]如下图1.2 引脚功能描述图所示:
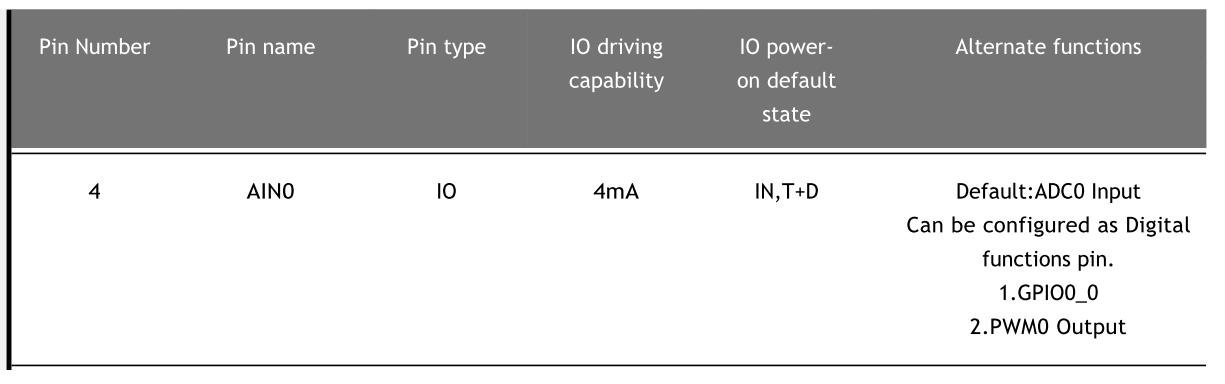
从上图1.2可以看出,P0_0是芯片的第4引脚,IO口有4mA的驱动能力。默认是输入模式。T+D表示三态下拉。具体的状态定义如下表1.1所示。
| 缩写 | 含义 |
|---|---|
| I | 输入 |
| O | 输出 |
| IO | 双向 |
| P | 电源或地 |
| T+D | 三态下拉 |
| T+U | 三态上拉 |
| OUT | 上电默认为输出模式 |
| IN | 上电默认为输入模式 |
功能选择。可以不看手册,直接在图形IO的名称上,就可以看出。P0_0-3,默认功能就是模拟功能。例如P0_5引脚。在图形块中可以看出:第一功能空,第二功能是GPIO,第三功能UART1_TX;图形块已经设置好。 输入模式对应读取引脚,输出模式对应写引脚。

如果你想查看关于引脚功能描述更多内容,请参考文章【1】。下载地址:天问ASR-ONE芯片手册。
GPIO 有输入、输出、中断模式。 其中中断模式可以设置为高电平、低电平、上升沿、下降沿、双边沿触发。如下图所示:
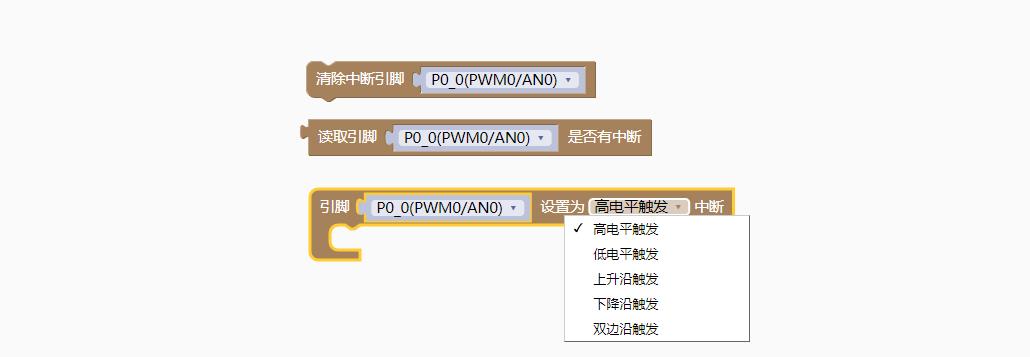
一般引脚触发中断后,在程序块里面读取引脚是否有中断,有中断的话,执行中断代码。中断代码里面用清除中断引脚标志位。
1.2 GPIO 代码编写
根据前面的分析,如果我们使用P0_0为GPIO的输入输出引脚,需要设定为第一功能引脚。同时根据使用需求,设置为输入模式、输出、中断触发。
(1)P0_0输出模式测试程序。 实现程序主要是通过P0_0输出高低电平,控制灯的亮灭。 电路原理图如下:

其中,高电平红灯灭,低电平红灯亮。 这与官方的板载RGB灯恰好相反。具体代码编写如下:
- 图形代码:

- 字符代码:
#include "asr.h"
#include "setup.h"
uint32_t snid;
void ASR_CODE();
//ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"
//ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"
//ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"
void app()
while (1)
digitalWrite(0,1);
delay(1000);
digitalWrite(0,0);
delay(1000);
vTaskDelete(NULL);
/*描述该功能...
*/
void ASR_CODE()
if((snid) == 4)
digitalWrite(13,1);
if((snid) == 6)
digitalWrite(13,0);
void setup()
//speak:小蝶-清新女声,vol:10,speed:10
//playid:10001,voice:欢迎使用智能管家,用智能管家唤醒我。
//playid:10002,voice:我退下了,用智能管家唤醒我
//ID:2,keyword:"唤醒词",ASR:"智能管家",ASRTO:"我在"
//ID:4,keyword:"命令词",ASR:"打开红灯",ASRTO:"好的,马上打开红灯"
//ID:6,keyword:"命令词",ASR:"关闭红灯",ASRTO:"好的,马上关闭红灯"
setPinFun(0,FIRST_FUNCTION);
pinMode(0,output);
xTaskCreate(app,"app",128,NULL,4,NULL);
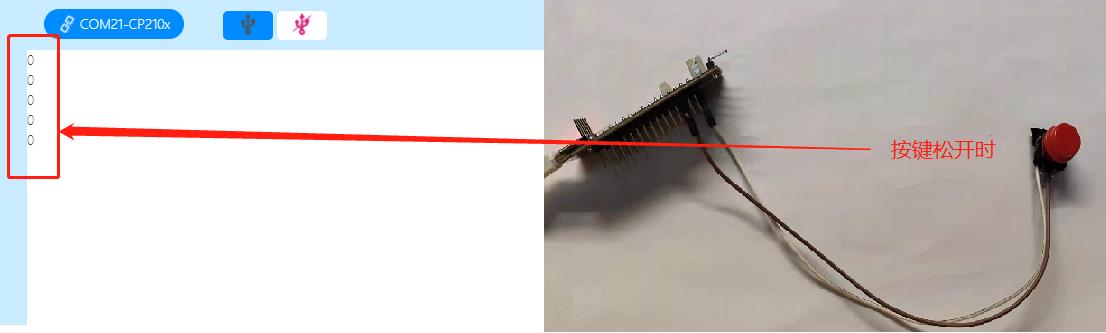
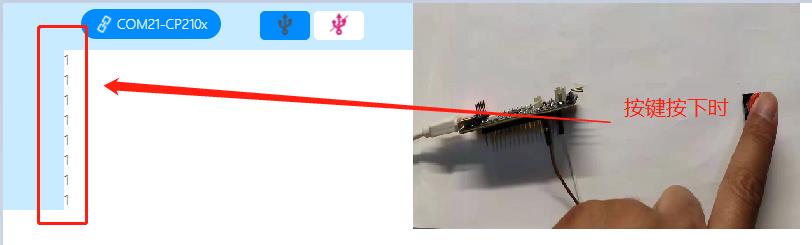
(2)P0_0输入模式。 实现程序主要是按键按下,P0_0获取到高电平;按键松开,P0_0获取到低电平。 电路原理图如下:

也许有人会疑问为什么KEY1 1引脚接3.3V。因为P0_0默认T+D(三态下拉),即默认P0_0悬空的情况下,读取到的是低电平。 所以KEY1 1引脚接3.3V,当按键KEY1按下时,P0_0读取到高电平,松开按键KEY1读取到低电平。
- 图形代码:

- 字符代码:
#include "asr.h"
#include "setup.h"
#include "HardwareSerial.h"
uint32_t snid;
void ASR_CODE();
//ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"
//ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"
//ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"
void app()
while (1)
Serial.println((digitalRead(0)));
delay(1000);
vTaskDelete(NULL);
/*描述该功能...
*/
void ASR_CODE()
if((snid) == 4)
digitalWrite(13,1);
if((snid) == 6)
digitalWrite(13,0);
void setup()
Serial.begin(9600);
//speak:小蝶-清新女声,vol:10,speed:10
//playid:10001,voice:欢迎使用智能管家,用智能管家唤醒我。
//playid:10002,voice:我退下了,用智能管家唤醒我
//ID:2,keyword:"唤醒词",ASR:"智能管家",ASRTO:"我在"
//ID:4,keyword:"命令词",ASR:"打开红灯",ASRTO:"好的,马上打开红灯"
//ID:6,keyword:"命令词",ASR:"关闭红灯",ASRTO:"好的,马上关闭红灯"
setPinFun(0,FIRST_FUNCTION);
pinMode(0,input);
xTaskCreate(app,"app",128,NULL,4,NULL);
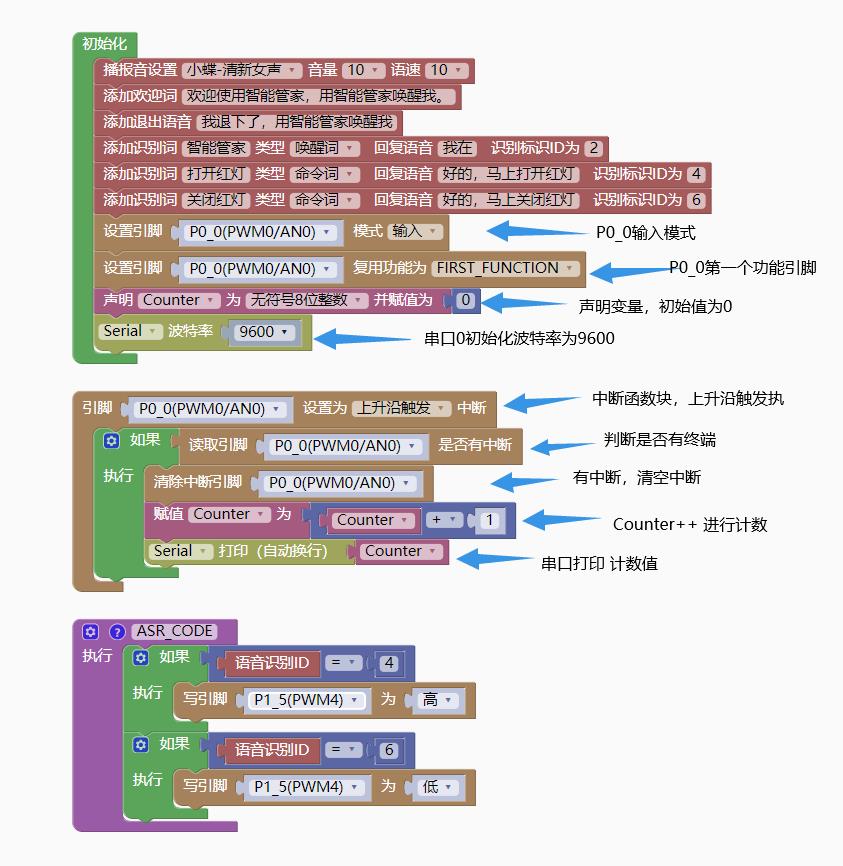
(3)P0_0中断模式。 中断属于输入,实现程序主要是P0_0中断相应会进行计数,并且用串口打印输出。 电路原理图如图1.7 P0_0 按键输入接线图所示。

#include "asr.h"
#include "setup.h"
#include "HardwareSerial.h"
uint32_t snid;
uint8_t Counter = 0;
void ASR_CODE();
//ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"
//ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"
//ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"
void GPIO0_irq()
if(gpio_get_irq_status(0))
Clear_GPIO_irq(0);
Counter = Counter + 1;
Serial.println(Counter);
/*描述该功能...
*/
void ASR_CODE()
if((snid) == 4)
digitalWrite(13,1);
if((snid) == 6)
digitalWrite(13,0);
void setup()
Serial.begin(9600);
//speak:小蝶-清新女声,vol:10,speed:10
//playid:10001,voice:欢迎使用智能管家,用智能管家唤醒我。
//playid:10002,voice:我退下了,用智能管家唤醒我
//ID:2,keyword:"唤醒词",ASR:"智能管家",ASRTO:"我在"
//ID:4,keyword:"命令词",ASR:"打开红灯",ASRTO:"好的,马上打开红灯"
//ID:6,keyword:"命令词",ASR:"关闭红灯",ASRTO:"好的,马上关闭红灯"
pinMode(0,input);
setPinFun(0,FIRST_FUNCTION);
pinMode(0,input);
Set_GPIO_irq(0,up_edges_trigger,GPIO0_irq);
1.3 GPIO 代码分析
如果上面的代码含义明白可以跳过【1.3节代码分析】。不太清楚,可以参考下面的代码分析。
(1)P0_0输出模式测试程序分析。
- 初始化:
- 设置引脚功能为第一引脚功能;
- 设置输出模式。
- 线程中写操作:
- 使用写引脚块,可设置为高,低电平。
在线程中,重复执行P0_0高电平,低电平。中间延时一秒钟。关键代码注释如下:

(2)P0_0输入模式测试程序分析。
-
初始化:
- 设置串口0波特率为9600;
- 设置引脚功能为第一引脚功能;
- 设置输入模式。
-
线程中读操作:
- 使用读引脚块,读取的内容通过串口打印出来。
在线程中,每秒钟读取P0_0状态,并通过串口打印出来。关键代码注释如下:

(3)P0_0中断测试程序分析。 P0_0上升沿触发中断,进入中断服务程序块后,首先会判断是否有中断,如有中断清空中断,执行中断服务程序。在中断里Counter会增加1,最后串口打印Counter的值。
1.4 GPIO 运行测试
(1)P0_0输出模式程序运行测试。 红灯闪烁,红灯每间隔一秒亮或灭。输出高电平红灯灭,输出高电平红灯亮。


(2)P0_0输入模式程序运行测试。 当松开按键读取到低电平,当按键按下时,P0_0读取到高电平。具体测试结果如下图所示。
(3)P0_0中断程序运行测试。 当松开按键按下时,P0_0会变化成高电平,即上升沿,会触发中断服务程序。由于按键被按下后,会有抖动。即按键按下后,可能会多次触发中断。如下测试,我是按了6次按键。中断执行了19次。
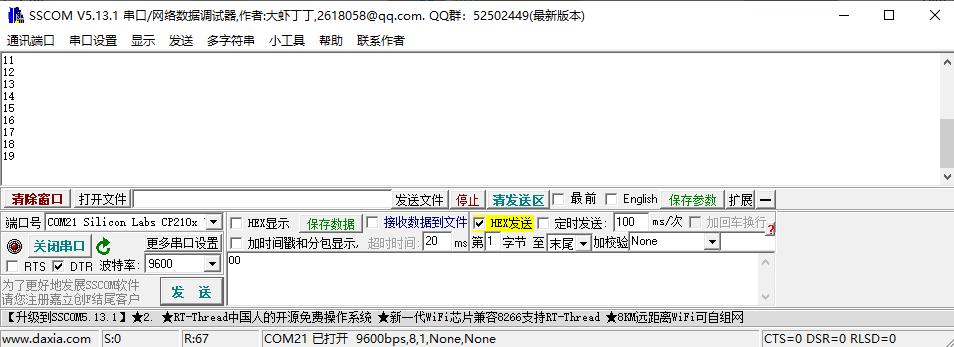
再按两次按键,结果如下所示:

1.5 GPIO 使用小结
GPIO的使用,一般需要设置功能引脚,设置输入、输出模式,输入模式对应读取引脚状态,输出模式对应输出高或低电平。实际使用设置功能引脚需要查看芯片引脚功能描述。而输入或输出模式则需要根据实际使用情况设置。GPIO可设置为中断,中断触发中断服务程序块执行。
二、TWEN-ASR ONE ADC读取操作
2.1 ADC 使用说明
TWEN-ASR ONE ADC拥有4路12bit SAR ADC输入通道。 ADC IO可与数字GPIO进行功能复用。从图1.1 TWEN-ASR ONE 引脚信息图,可知ADC 引脚分别是AIN0~AIN3,对应是P0_0 ~P0_3。因为IO复用特别需要注意功能引脚设置。而ADC是默认的功能。所以使用ADC无需另外设置功能引脚。
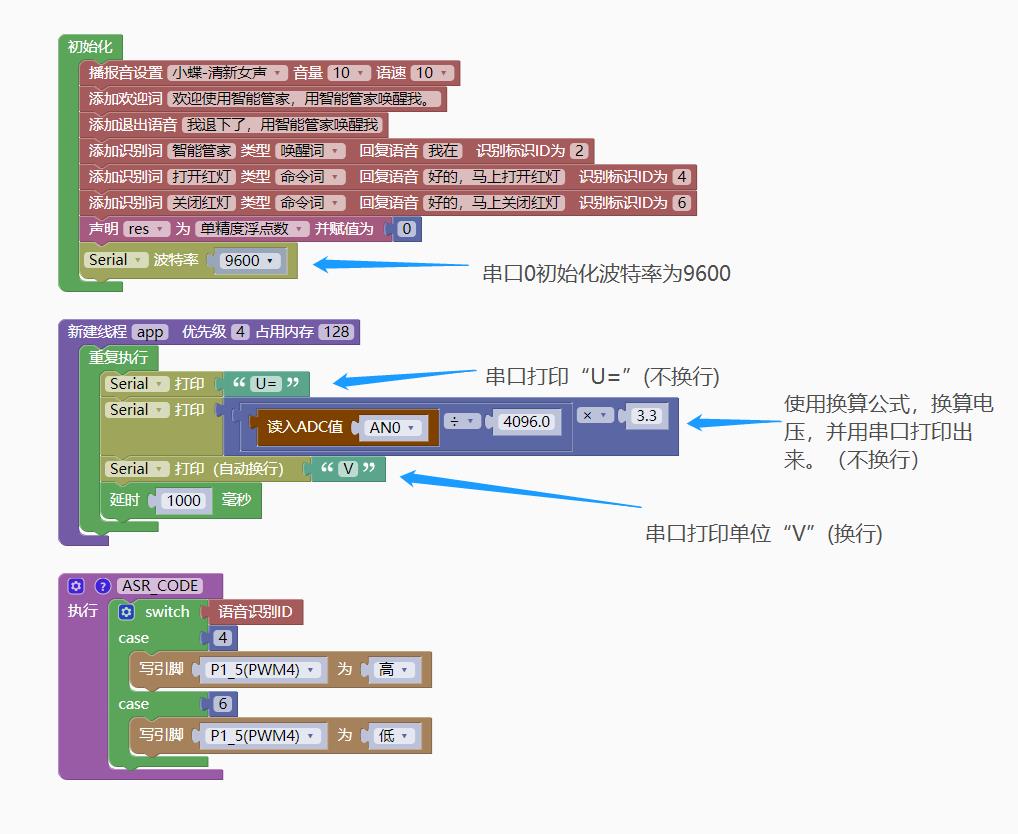
2.2 ADC 代码编写
实现程序主要是读取AIN0数值,并进行电压换算,最后用串口打印电压值。 关于电压的换算,由于TWEN-ASR是12位的ADC,那么读取的范围0 ~(212 - 1),即0 ~ 4095。0对应电压为0V,4095对应3.3V(参考电压)。读取数值和电压是线性关系,换算公式1如下:
U = V a l 4095 ∗ 3.3 v U=\\fracVal4095*3.3v U=4095Val∗3.3v
--- 公式1
其中,
V
a
l
Val
Val是读取的ADC值,
U
U
U是换算出来的电压值。测试ADC将会使用滑动电位器, 测试电路原理如下图2.1所示:
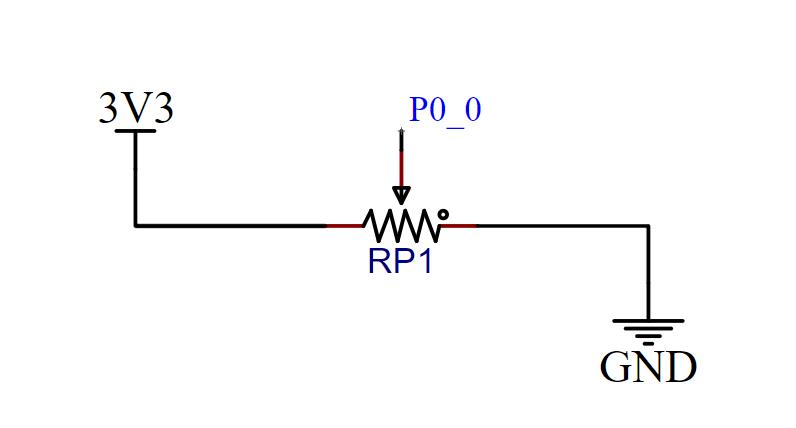
其中,P0_0对应AIN0,滑到最左边电压为3.3V,滑到最右边电压为0V。
- 图形代码:
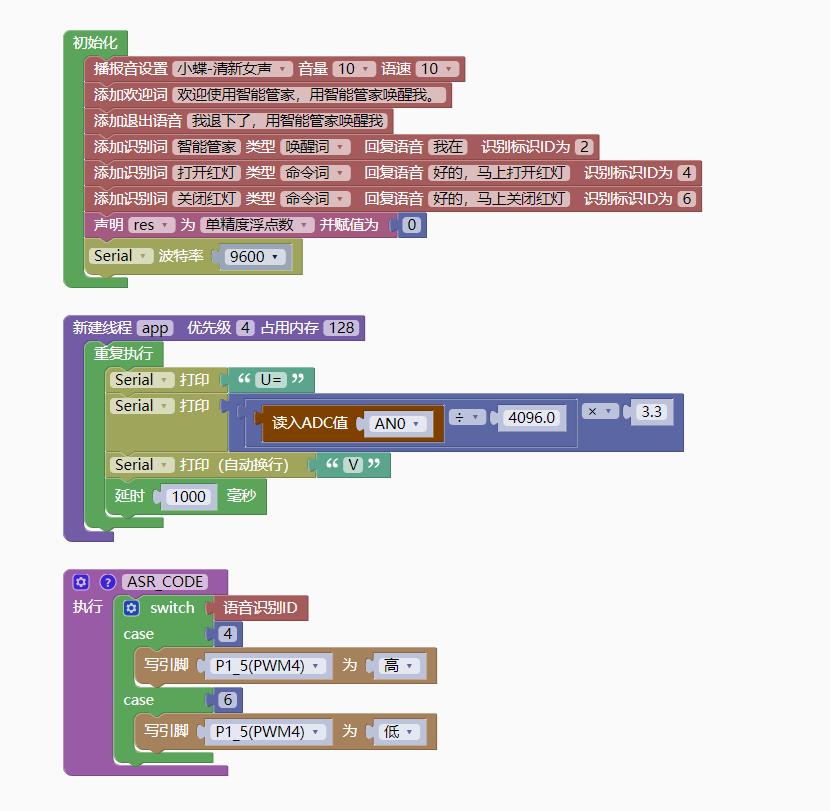
- 字符代码:
#include "asr.h"
#include "setup.h"
#include "HardwareSerial.h"
uint32_t snid;
float res = 0;
void ASR_CODE();
//ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"
//ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"
//ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"
void app()
while (1)
Serial.print("U=");
Serial.print(((adc_read(0) / 4096.0) * 3.3));
Serial.println("V");
delay(1000);
vTaskDelete(NULL);
/*描述该功能...
*/
void ASR_CODE()
switch (snid)
case 4:
digitalWrite(13,1);
break;
case 6:
digitalWrite(13,0);
break;
void setup()
Serial.begin(9600);
//speak:小蝶-清新女声,vol:10,speed:10
//playid:10001,voice:欢迎使用智能管家,用智能管家唤醒我。
//playid:10002,voice:我退下了,用智能管家唤醒我
//ID:2,keyword:"唤醒词",ASR:"智能管家",ASRTO:"我在"
//ID:4,keyword:"命令词",ASR:"打开红灯",ASRTO:"好的,马上打开红灯"
//ID:6,keyword:"命令词",ASR:"关闭红灯",ASRTO:"好的,马上关闭红灯"
xTaskCreate(app,"app",128,NULL,4,NULL);
2.3 ADC 代码分析
如果上面的代码含义明白可以跳过【2.3 ADC 代码分析】。不太清楚,可以参考下面的代码分析。
P0_0引脚默认是ADC功能引脚,所以不需要设置功能引脚。 在线程app里面,"读入ADC值AN0"就是读取AIN0的值,并根据公式1进行电压换算。
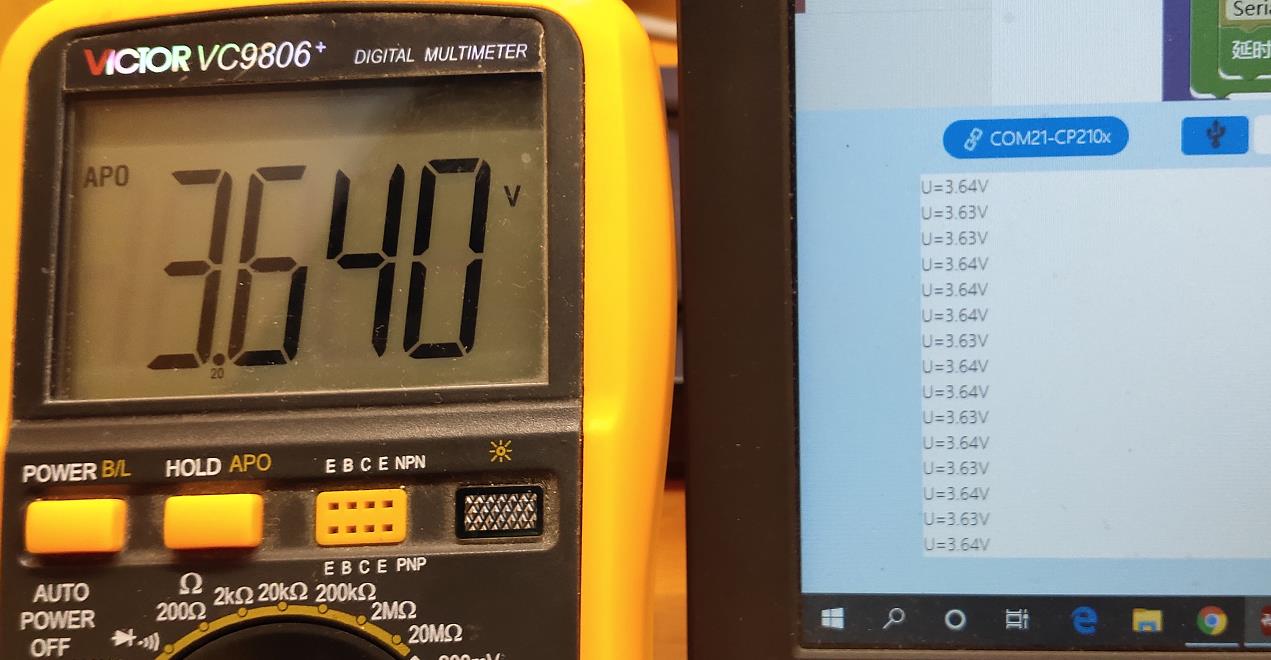
2.4 ADC 运行测试
程序下载完后,打开串口监视器。

由上图可知,串口打印出U=3.3 V,而实际万用表测出来是3.608V,误差有0.308V左右。因为参考电压选用了3.3V,而实际是3.608V。当我再次测量ASR-ONE 3.3V引脚时,实测电压为3.637V。所以修改程序为:

调节滑动电位器,到最左端。万用表实测电压为3.640V,串口输出为3.63V或3.64V。可见经过修改参考值后,数据与万用表接近。
再次调节滑动电位器。万用表实测电压为2.275V,串口输出为2.27、2.28、2.29V。可见数据与万用表接近。误差还是很小的,在接受范围内。

2.5 ADC 使用小结
ADC 使用不需要设置功能引脚,因为默认就是ADC功能。ADC 引脚分别是AIN0~AIN3,对应是P0_0 ~P0_3。本文使用P0_0进行测试,可见ADC使用,需要对参考电压的修正,才能准确测量出电压值。当然如果使用稳压管的电压作为参考电压,这样就不用修正。或者ASR-ONE是否有内部的基准电压可用。想要用好ASR-ONE的ADC还需要对芯片更多的了解。
三、TWEN-ASR ONE PWM使用
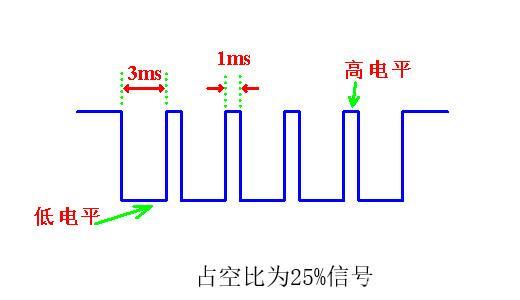
3.1 PWM 使用说明
PWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比,例如方波的占空比就是50%[2]。
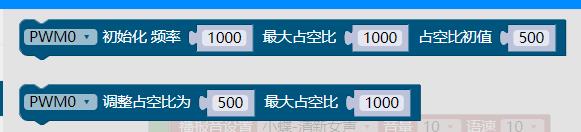
在天问Block软件中,有两个PWM相关的块。使用PWM只需要进行PWM初始化,设置占空比、初始值、调整占空比。
3.2 PWM 代码编写
实现程序主要是读取AIN0数值,根据读到的数值,调节板载RGB灯的绿灯的亮度,值越大亮度越大,反之,亮度越小。 RGB灯的电路原理图如下所示:

其中,PWM5是控制绿灯。
- 图形代码:

- 字符代码:
#include "asr.h"
#include "setup.h"
uint32_t snid;
void ASR_CODE();
//ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"
//ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"
//ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"
void app()
while (1)
pwm_set_duty(PWM5,adc_read(0),0x1000);
delay(50);
vTaskDelete(NULL);
/*描述该功能...
*/
void ASR_CODE()
if((snid) == 4)
digitalWrite(13,1);
if((snid) == 6)
digitalWrite(13,0);
void setup()
//speak:小蝶-清新女声,vol:10,speed:10
//playid:10001,voice:欢迎使用智能管家,用智能管家唤醒我。
//playid:10002,voice:我退下了,用智能管家唤醒我