ubuntu20 ros使用usb相机
Posted 怪皮蛇皮怪
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ubuntu20 ros使用usb相机相关的知识,希望对你有一定的参考价值。
ros大佬链接
opencv大佬链接(没有找到链接)
(opencv大佬对不起,我写博客的时候已经是我把这个东西弄完的好久之后了,翻历史记录半个多小时都没翻到原链接,如果那天你看到了这个我再删除对应内容或者再把链接补上来)
(我重新百度半个多小时,发现有不少代码其实和opencv里的代码相似甚至一样,只不过他们的没有imoprt 意义不明的numpy和matplot)
虽然可以删掉这两行意义不明根本没有用到的import,但这两行代码却是我第一个找到的opencv打开usb相机的证明,是大佬存在的证明
留着挨打
ROS
1.安装ros usb相机库
sudo apt install ros-noetic-usb-cam
2.查看usb相机是哪个文件
ls /dev/video*

在这里会看到若干个文件,一般只有一个相机的话应该是尾号0的
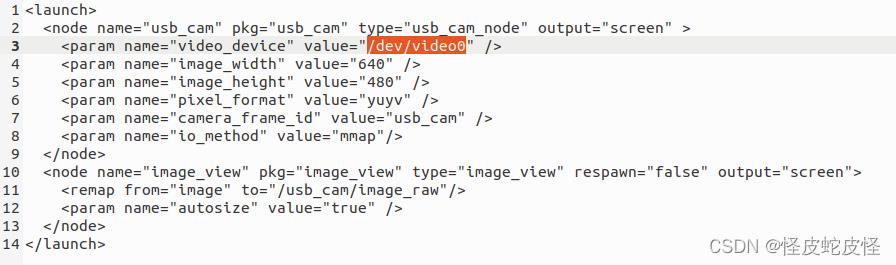
3.修改launch文件中打开的相机
在launch文件里写了打开的相机的文件,要将需要打开的相机填入名称
gedit /opt/ros/noetic/share/usb_cam/launch/usb_cam-test.launch
4.大功告成,打开相机
roslaunch usb_cam usb_cam-test.launch
5.rviz查看相机内容
别吧。。。应该到这里没有人需要我教怎么在rviz里调出相机画面的吧
OPENCV
python版本
import cv2
import numpy
import matplotlib.pyplot as plot
def main():
cap = cv2.VideoCapture(0)
while (1):
ret, frame = cap.read()
cv2.imshow("capture", frame)
if (cv2.waitKey(1) & 0xFF == ord('q')):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
在搜索python打开相机期间找到的其他资料
IDE相关(六)Ubuntu18.04+Python2/3.6.5+OpenCV3.4.3实现开启摄像头
以上是关于ubuntu20 ros使用usb相机的主要内容,如果未能解决你的问题,请参考以下文章