论文阅读:Deep Bilateral Learning for Real-Time Image Enhancement
Posted Matrix_11
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文阅读:Deep Bilateral Learning for Real-Time Image Enhancement相关的知识,希望对你有一定的参考价值。
Deep Bilateral Learning for Real-Time Image Enhancement
ABSTRACT
对于移动端的图像处理,性能功耗是一个非常大的挑战,这篇文章提出了一种新的网络架构可以实现实时的图像处理,这种网络架构是基于 bilateral grid processin 和 local affine color transforms,利用成对的输入-输出图像,文章作者训练一个卷积神经网络去预测 bilateral space 中的局部仿射变换模型的系数,这个网络结构可以同时在局部以及全局层面,基于图像内容去估计一个想要的图像变换。在实际运行的时候,先将高分辨率的图像缩小送入网络,网络再产生一组在 bilateral space 的仿射变换系数,这些仿射变换通过一种保边的形式上采样回高分辨,这些高分辨率的仿射变换就可以直接作用于原始的高分辨率图像。文章作者指出,这种算法可以在移动端实现毫秒级的运算速度,同时可以灵活 cover 各种图像变换操作,甚至包括复杂的图像 PS 效果。
INTRODUCTION
现在消费级的终端产品拍摄的图像或者视频的分辨率越来越高,图像后处理的算法复杂度也随之升高,所以为了满足性能功耗要求,最终运行在终端产品上的代码都需要有经验的程序员仔细地去优化。图像增强是图像处理里面非常常用的一种方式,但是图像增强都有很强的主观性,很多时候,图像增强的效果都是基于人的美学感知去调试出来的,这种效果很难用传统的处理流程来复现,这篇文章提出用基于学习的方法来实现。
基于深度学习的图像处理已经有很多相关的工作了,之前的这些网络,在处理图像时候的复杂度基本和图像的分辨率成线性关系,因为之前的网络结构,其包含的算子都是要在全尺寸上运行。虽然这些网络的效果也不错,但是代价就是算法复杂度很高,无法满足很多应用场景下的实时性要求。这篇文章提出的网络结构可以运行地更快,与常见的网络相比,运行速度可以快上成百上千倍。
这个网络结构主要包括三个部分,1):网络绝大多数的预测都是在一个低维的 bilateral grid 里面进行,这个预测后面会详细介绍,为什么称为 bilateral grid,因为这有点类似 bilateral filter,同时考虑了像素的位置与像素值。2): 网络的输出是融合权重,而不是最终的图像,这个也是借鉴了之前的一些工作,发现预测融合权重的效果比直接预测输出的效果要好。3): 最终的 loss 是在全分辨率下进行计算的,这样可以保证网络去评估对全分辨率的图像的影响。
OUR ARCHITECTURE
这个模型包含两个 stream,一个是低分辨率的 stream,一个是全分辨率的 stream,低分辨率的 stream 负责预测局部仿射变换,文章中指出,图像增强任务需要同时考虑图像的局部信息和全局信息,所以低分辨率的 stream 又同时包含了一个 local path 和一个全局 path,这两个 path 在后端融合输出最终的仿射变换。全分辨率的 stream 利用低分辨率 stream 的仿射变换信息,对输入图像在全分辨率上进行仿射变换,文章利用一种 slicing 的方式,可以用很低的运算代价实现高分辨率的仿射变换。
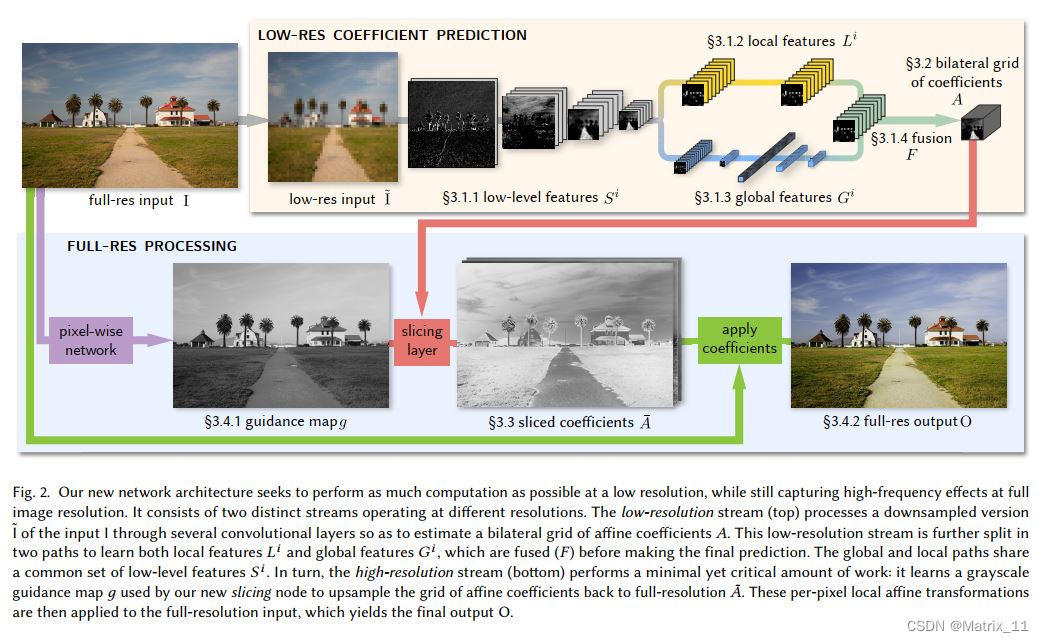
Low-resolution prediction of bilateral coefficients
低分辨率的输入 I ~ \\tildeI I~ 文章中是固定为 256 X 256,通过一系列的卷积提取 low-level 的特征同时压缩分辨率,然后在末端进行分流,一路用全卷积算子获取局部特征,另外一路用卷积和全连接去学习一个固定尺寸的全局特征,这两路的输出,最后再融合成一组特征,这组特征通过一些线性层最后成为包含仿射系数的 bilateral grid。
Low-level features
首先利用卷积算子获取 low level 的特征, S 0 : = I ~ S^0: = \\tildeI S0:=I~
S c i [ x , y ] = σ ( b c i + ∑ x ′ , y ′ , c ′ w c c ′ i [ x ′ , y ′ ] S c ′ i − 1 [ s x + x ′ , s y + y ′ ] ) S_c^i[x, y] = \\sigma \\left( b_c^i + \\sum_x', y', c' w_cc'^i [x', y']S_c'^i-1[sx+x', sy+y'] \\right) Sci[x,y]=σ⎝⎛bci+x′,y′,c′∑wcc′i[x′,y′]Sc′i−1[sx+x′,sy+y′]⎠⎞
i = 1 , 2 , . . . , n S i=1, 2, ..., n_S i=1,2,...,nS 表示层数, c , c ′ c, c' c,c′ 表示每一层的通道数, w ′ w' w′ 表示卷积的权重, b i b^i bi 表示 biases, x ′ , y ′ x', y' x′,y′ 表示邻域的范围,激活函数用的是 RELU。文章中 n s n_s ns 是 4。
Local features path
提取的 low level 特征 S n s S^n_s Sns 在后端会分成两路处理,一路是利用 stride 为 1 的全卷积算子,进行卷积处理,在保持空间分辨率不变的同时,扩大了感受野,从而能够更好地提取语义特征。
Global features path
另外一路就是 global feature path,与 local feature path的输入一样,都是 low level feature S n s S^n_s Sns,这一路包含两个 stride 为 2 的卷积层,然后再加上三个全连接层,这一路最终输出一个 64 维的全局特征。
Fusion and linear prediction
接下来,就是将两路的输出进行融合,
F c [ x , y ] = σ ( b c + ∑ c ′ w c c ′ ′ G c ′ n G + ∑ c ′ w c c ′ L c ′ n L [ x , y ] ) F_c[x, y] = \\sigma \\left( b_c + \\sum_c' w'_cc' G_c'^n_G + \\sum_c'w_cc'L_c'^n_L[x, y] \\right) Fc[x,y]=σ(bc+c′∑wcc′′Gc′nG+c′∑wcc′Lc′nL[x,y])
这个最终形成了一个 16 × 16 × 64 16 \\times 16 \\times 64 16×16×64 的 feature map,这个 feature map 再通过一些线性变换,得到 16 × 16 × 96 16 \\times 16 \\times 96 16×16×96 的 feature map:
A c [ x , y ] = b c + ∑ c ′ F c ′ [ x , y ] w c c ′ ′ A_c[x, y] = b_c + \\sum_c' F_c'[x, y]w'_cc' Ac[x,y]=bc+c′∑Fc′[x,y]wcc′′
Image features as a bilateral grid
到目前为止,我们已经介绍了如何获取 feature map,接下来,我们介绍如何将 feature map 与 bilateral grid 联系起来,上面我们已经说过,我们获得了一个 16 × 16 × 96 16 \\times 16 \\times 96 16×16×96 的 feature map,我们可以把这个 feature map 看成是一个多通道的 bilateral grid,如下所示:
A d c + z [ x , y ] ⟷ A c [ x , y , z ] A_dc+z[x, y] \\longleftrightarrow A_c[x, y, z] Adc+z[x,y]⟷Ac[x,y,z]
d = 8 d = 8 d=8 表示 grid 的深度,这样 A A A 可以看成是一个 16 × 16 × 8 16 \\times 16 \\times 8 16×16×8 的 bilateral grid,而每个 grid 包含 12 个系数,可以等价为一个 $ 3 \\times 4$ 的仿射变换矩阵。
Upsampling with a trainable slicing layer
接下来,就是这篇文章最为创新的地方,通过一个 slicing 的操作,可以将低维的 feature map 和一个高维的 guidance map 结合,最后输出高维的 feature map,如下所示:
A
ˉ
c
[
x
,
y
]
=
∑
i
,
j
,
k
τ
(
s
x
x
−
i
)
τ
(
s
y
y
−
j
)
τ
(
d
⋅
g
[
x
,
以上是关于论文阅读:Deep Bilateral Learning for Real-Time Image Enhancement的主要内容,如果未能解决你的问题,请参考以下文章