BBO三维路径规划基于matlab生物地理学算法无人机三维路径规划含Matlab源码 2076期
Posted 海神之光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了BBO三维路径规划基于matlab生物地理学算法无人机三维路径规划含Matlab源码 2076期相关的知识,希望对你有一定的参考价值。
一、生物地理算法简介
1 基本思路
BBO 算法起源于生物地理学,它通过模拟多物种在不同栖息地的分布、迁移、突变等规律求解寻优问题,在多目标规划领域有广泛应用. 栖息地被认为是独立的区域,不同的栖息地拥有不同的适宜指数HSI(Habitat suitability index)。 HSI较高的栖息地物种丰富度较高,随着种群趋于饱和,其迁出率增高,迁入率减少,而HIS较低的栖息地与之相反,迁入率增高,迁出率减少. 当栖息地遭遇灾害或瘟疫等突发事件时,HIS将随之突变,打破动态平衡,为低HIS的栖息地添加了不可预见性,增大了搜索目标解的几率2.2 迁移和突变操作物种的迁移有其具体的物理模型,最常的有线性模型、二次模型、余弦模型等 . 以图 3线性模型为例,当某栖息地物种数目为 0 时迁入率最高,此刻 λ = I,随着迁入物种数目不断增加,受阳光、水、食物等资源限制,迁入率不断降低,迁出率不断增高 . 当栖息地物种数目为 S0时,恰好达到动态平衡,此时迁出率与迁入率相同 . 而栖息地达到饱和状态时,物种数量达到最大值Smax ,此刻不再有物种迁入,迁出率 μ = E.突变操作基于生物地理学统计公式完成:

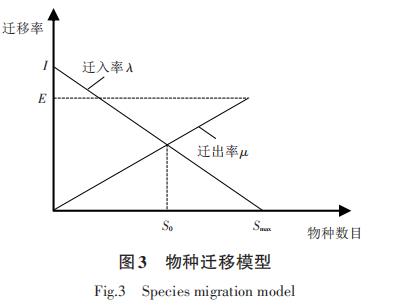
式中:ms为栖息地发生突变的概率,mmax为最大突变率,用户可自行设定 . ps为栖息地容纳s种物种的概率, pmax代表容纳最大种群的概率。
二、部分源代码
close all;
clear all;
clc;
addpath(genpath(‘./’));
%%规划路径
disp(‘Planning …’);
map = load_map(‘maps/map4.txt’, 0.1, 0.5, 0.25);
start = [1 -4 1];
stop = [0.1 17 3];
%start = [0 1 5];
%stop = [19 1 5];
nquad = length(start);
for qn = 1:nquad
v = cputime;
pathqn = bbo(map, startqn, stopqn);
c = cputime - v;
fprintf(‘Algo Execution time = %d \\n’,c);
end
if nquad == 1
plot_path(map, path1);
else
% you could modify your plot_path to handle cell input for multiple robots
end
%% 额外的初始化脚本
init_script;
%%运行轨迹
trajectory = test_trajectory(start, stop, map, path, true); % with visualization
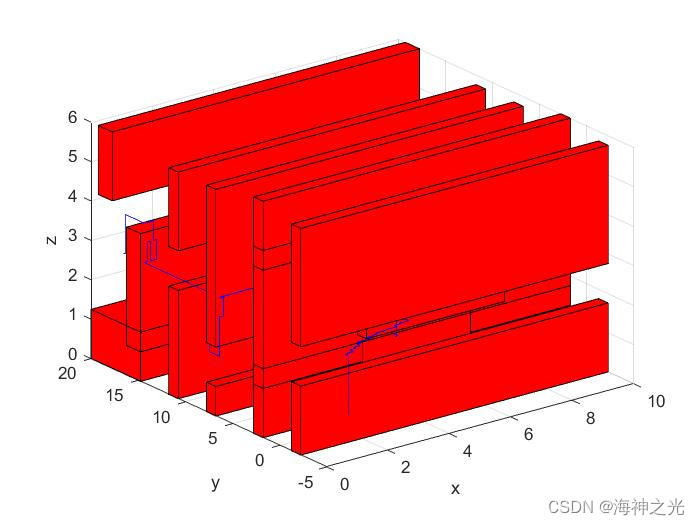
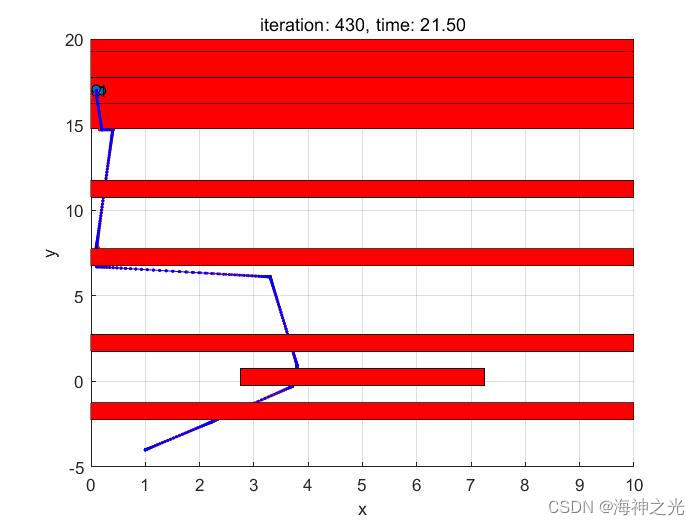
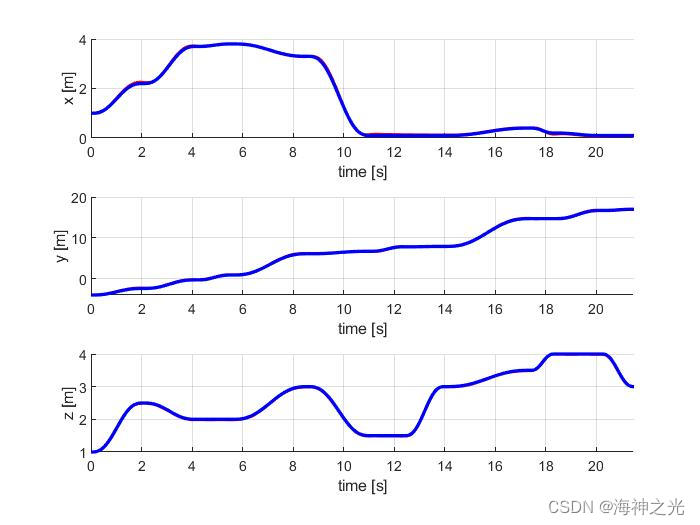
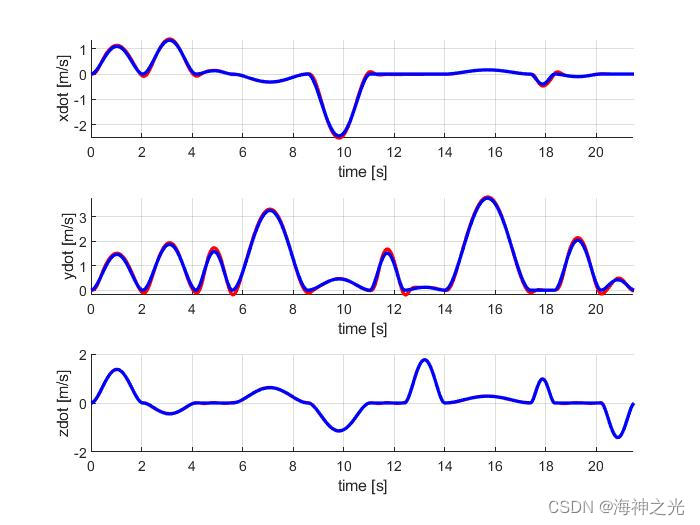
三、运行结果
四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
以上是关于BBO三维路径规划基于matlab生物地理学算法无人机三维路径规划含Matlab源码 2076期的主要内容,如果未能解决你的问题,请参考以下文章
路径规划基于粒子群遗传求解多无人机三维路径规划matlab源码
三维路径规划基于matlab蚁群算法三维路径规划含Matlab源码 179期
三维路径规划基于matlab自适应遗传算法求解单无人机三维路径规划问题含Matlab源码 214期