从入门到掉坑:Go 内存池/对象池技术介绍
Posted 腾讯技术工程
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了从入门到掉坑:Go 内存池/对象池技术介绍相关的知识,希望对你有一定的参考价值。
Go 中怎么实现内存池,直接用 map 可以吗?常用库里 GroupCache、BigCache 的内存池又是怎么实现的?有没有坑?对象池又是什么?想看重点的同学,可以直接看第 2 节 GroupCache 总结。
0. 前言: tcmalloc 与 Go
以前 C++服务上线,遇到性能优化一定会涉及 Google 大名鼎鼎的 tcmalloc。
相比 glibc,tcmalloc 在多线程下有巨大的优势:
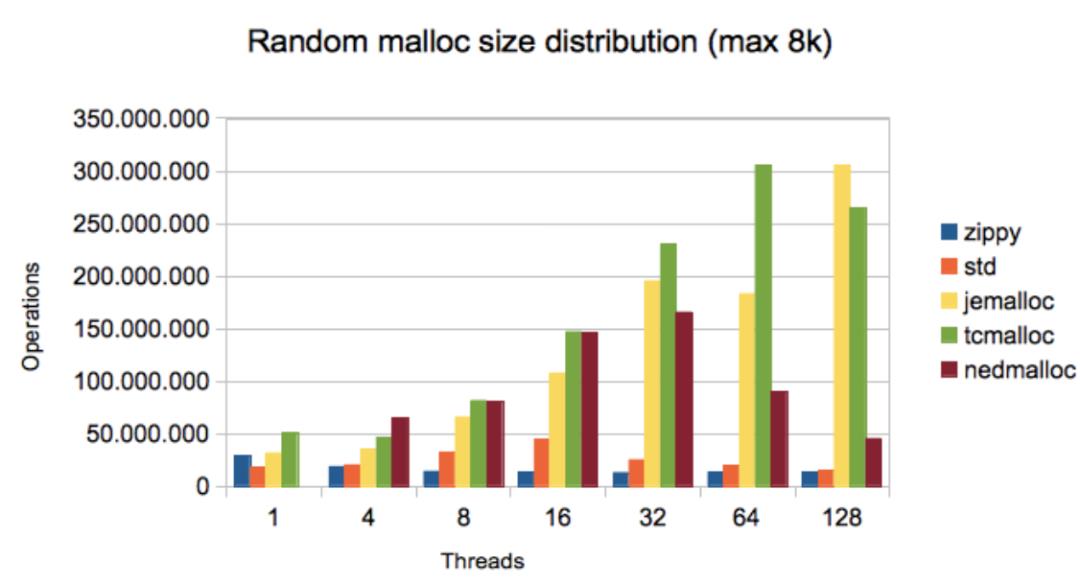
其中使用的就是内存池技术。如果想了解 tcmalloc 的细节,盗一张中比较经典的结构图:
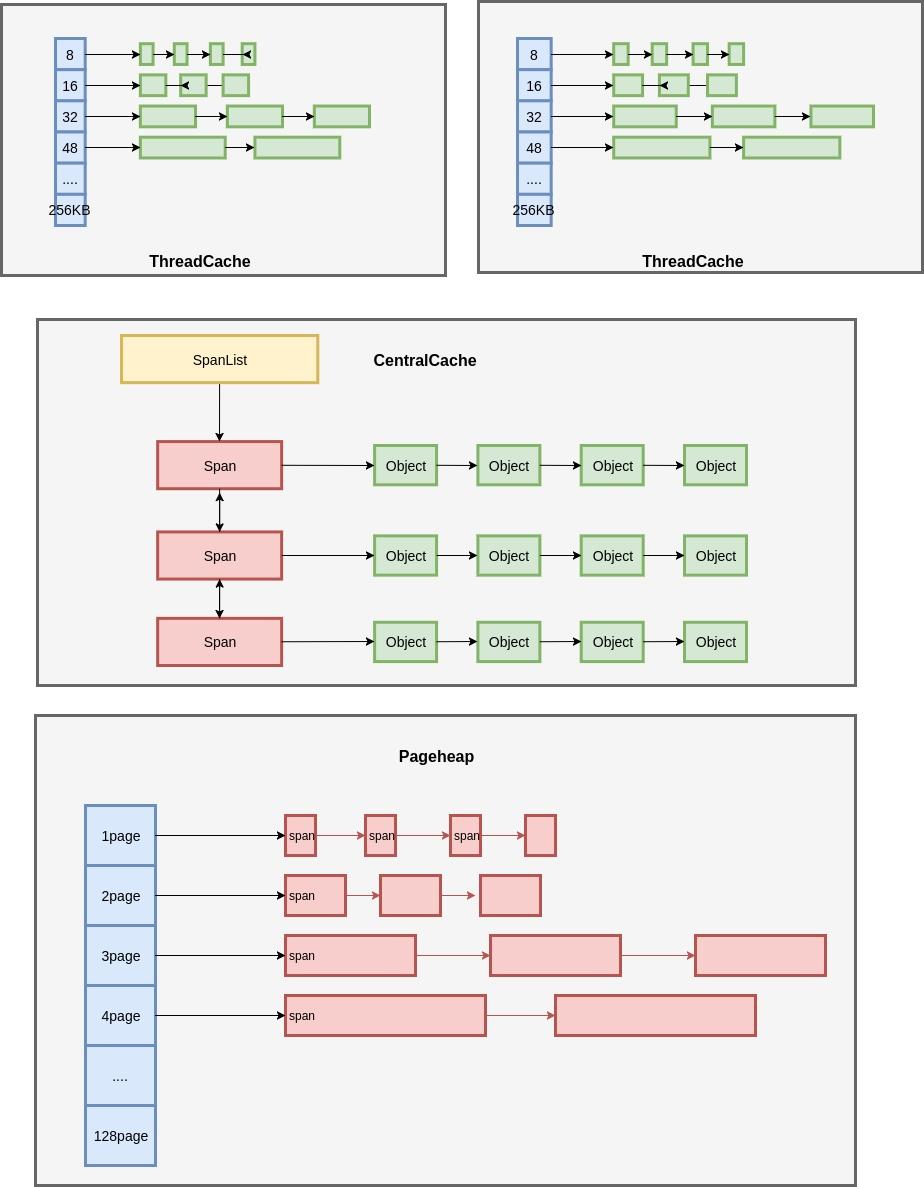
作为 Google 的得意之作,Golang自然也用上了 tcmalloc 的03 技术。因此我们普通使用 Golang 时,无需关注内存分配的性能问题。
1. 关于 map 你需要了解的
既然 Go 本身内存已经做了 tcmalloc 的管理,那实现缓存我们能想到的就是 map 了,是吧?(但仔细想想,map 不需要加锁吗?不加锁用 sync.Map 更好吗)
坑 1: 为什么不用 sync.Map
2020-05-09 补充:多位同学也提到了,bigcache 这个测试并不公平。查了下 issues,map+lock 和 sync.Map 的有人做过测试,性能确实低一些(单锁的情况)
但如果是 shards map+lock 和 sync.Map,在不同的读写比(比如读多写少,当超时才更新)时,这块就不好判断哪种实现更优了,有兴趣的同学可以尝试深挖下(而且 doyenli 也提到,sync.Map 内部是 append only 的)
用过 map 的同学应该会知道,map 并不是线程安全的。多个协程同步更新 map 时,会有概率导致程序 core 掉。
那我们为什么不用sync.Map?当然不是因为 go 版本太老不支持这种肤浅原因。
里有张对比数据,纯写 map 是比 sync.Map 要快很多,读也有一定优势。考虑到多数场景下读多写少,我们只需对 map 加个读写锁,异步写的问题就搞定了(还不损失太多性能)。
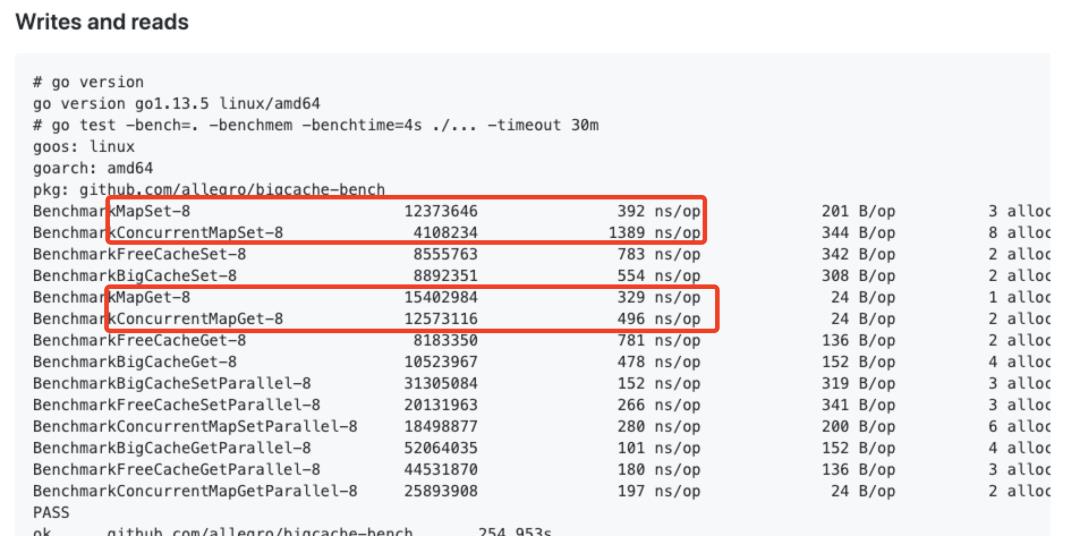
除了读写锁,我们还可以使用 shard map 的分布式锁来继续提高并发(后面 bigcache 部分会介绍),所以你看最终的 cache 库里,大家都没用 sync.Map,而是用map+读写锁来实现存储。
坑 2: 用 map 做内存池就可以了?
并不能。map 存储 keys 也是有限制的,当 map 中 keys 数量超过千万级,有可能造成性能瓶颈。
这个是我在之前业务中实际遇到的情况,当时服务里用了 GroupCache 做缓存,导致部分线上请求会超时(0.08%左右的超时率)。我们先暂时放下这个问题,弄清原因再来介绍这里的差异。
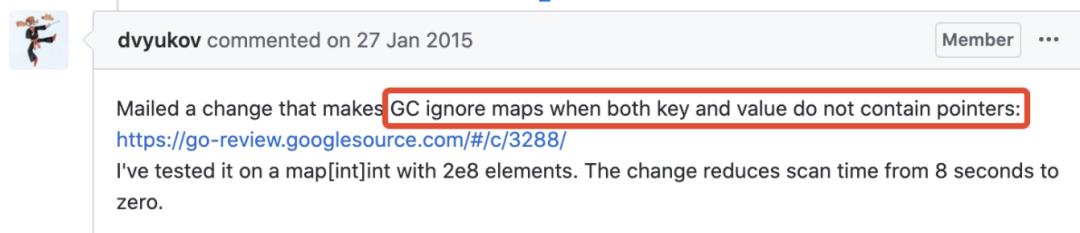
找了下资料,发现 2014 年 Go 有个 issue 提到 的问题。简单来说就是当 map 中存在大量 keys 时,GC 扫描 map 产生的停顿将不能忽略。
好消息是 2015 年 Go 开发者已经对 map 中无指针的情况进行了优化:
我们参考其中的代码,写个验证下:
package main
import (
"fmt"
"os"
"runtime"
"time"
)
// Results of this program on my machine:
//
// for t in 1 2 3 4 5; do go run maps.go $t; done
//
// Higher parallelism does help, to some extent:
//
// for t in 1 2 3 4 5; do GOMAXPROCS=8 go run maps.go $t; done
//
// Output(go 1.14):
// With map[int32]*int32, GC took 456.159324ms
// With map[int32]int32, GC took 10.644116ms
// With map shards ([]map[int32]*int32), GC took 383.296446ms
// With map shards ([]map[int32]int32), GC took 1.023655ms
// With a plain slice ([]main.t), GC took 172.776µs
func main() {
const N = 5e7 // 5000w
if len(os.Args) != 2 {
fmt.Printf("usage: %s [1 2 3 4]\n(number selects the test)\n", os.Args[0])
return
}
switch os.Args[1] {
case "1":
// Big map with a pointer in the value
m := make(map[int32]*int32)
for i := 0; i < N; i++ {
n := int32(i)
m[n] = &n
}
runtime.GC()
fmt.Printf("With %T, GC took %s\n", m, timeGC())
_ = m[0] // Preserve m until here, hopefully
case "2":
// Big map, no pointer in the value
m := make(map[int32]int32)
for i := 0; i < N; i++ {
n := int32(i)
m[n] = n
}
runtime.GC()
fmt.Printf("With %T, GC took %s\n", m, timeGC())
_ = m[0]
case "3":
// Split the map into 100 shards
shards := make([]map[int32]*int32, 100)
for i := range shards {
shards[i] = make(map[int32]*int32)
}
for i := 0; i < N; i++ {
n := int32(i)
shards[i%100][n] = &n
}
runtime.GC()
fmt.Printf("With map shards (%T), GC took %s\n", shards, timeGC())
_ = shards[0][0]
case "4":
// Split the map into 100 shards
shards := make([]map[int32]int32, 100)
for i := range shards {
shards[i] = make(map[int32]int32)
}
for i := 0; i < N; i++ {
n := int32(i)
shards[i%100][n] = n
}
runtime.GC()
fmt.Printf("With map shards (%T), GC took %s\n", shards, timeGC())
_ = shards[0][0]
case "5":
// A slice, just for comparison to show that
// merely holding onto millions of int32s is fine
// if they're in a slice.
type t struct {
p, q int32
}
var s []t
for i := 0; i < N; i++ {
n := int32(i)
s = append(s, t{n, n})
}
runtime.GC()
fmt.Printf("With a plain slice (%T), GC took %s\n", s, timeGC())
_ = s[0]
}
}
func timeGC() time.Duration {
start := time.Now()
runtime.GC()
return time.Since(start)
}
代码中一共测试了 5 种情况,写入5000w的 keys 后,主动触发 2 次 GC 来测量耗时:
[1] With map[int32]*int32, GC took 456.159324ms
[2] With map[int32]int32, GC took 10.644116ms
[3] With map shards ([]map[int32]*int32), GC took 383.296446ms
[4] With map shards ([]map[int32]int32), GC took 1.023655ms
[5] With a plain slice ([]main.t), GC took 172.776µs
可以看到,当 map 中没有指针时,扫描停顿时间大约在 10ms 左右,而包含指针int32时则会扩大 45 倍。
先看 5 的数据,单纯的 slice 速度飞快,基本没有 GC 消耗。而 map shards 就有点耐人寻味了,为什么我们没有对 map 加锁,分 shard 后 GC 时间还是缩短了呢?说好的将锁分布式化,才能提高性能呢?
坑 3: shards map 能提高性能的元凶(原因)
要了解 shards map 性能变化的原因,需要先弄清楚 Golang GC 的机制。我们先加上GODEBUG=gctrace=1观察下 map 里包含指针与没有指针的 gc 差异:
map[]*int: gc 11 @11.688s 2%: 0.004+436+0.004 ms clock, 0.055+0/1306/3899+0.049 ms cpu, 1762->1762->1220 MB, 3195 MB goal, 12 P (forced)map[]int: gc 10 @9.357s 0%: 0.003+14+0.004 ms clock, 0.046+0/14/13+0.054 ms cpu, 1183->1183->746 MB, 2147 MB goal, 12 P (forced)
输出各字段含义可以看,这里我们只关注 cpu 里 0.055+0/1306/3899+0.049 ms cpu 这段的解释:
-
Mark Prepare (STW) - 0.055 表示整个进程在 mark 阶段 STW 停顿时间 -
Marking - 0/1306/3899 三段信息,其中 0 是 mutator assist 占用时间,1306 是 dedicated mark workers+fractional mark worker 占用的时间,3899 是 idle mark workers 占用的时间(虽然被拆分为 3 种不同的 gc worker,过程中被扫描的 P 还是会暂停的,另外注意这里时间是所有 P 消耗时间的总和) -
Mark Termination (STW) - 0.049 表示整个进程在 markTermination 阶段 STW 停顿时间
只有 Mark 的前后两个阶段会导致 Stop-The-World(STW),中间 Marking 过程是并行的。这里 1306ms 是因为我们启动了 12 个 P,1306ms 和 3899ms 是所有 P 消耗时间的综合。虽然说是 Marking 是并行,但被扫描到的 P 还是会被暂停的。因此这个时间最终反映到业务程序上,就是某个 P 处理的请求,在 GC 时耗时突增(不稳定),不能被简单的忽略
那回到上面的问题了,shards map 的性能又是如何得到提升(近 10 倍)的?
// With map[int32]int32, GC took 11.285541ms
gc 1 @0.001s 7%: 0.010+2.1+0.012 ms clock, 0.12+0.99/2.1/1.2+0.15 ms cpu, 4->6->6 MB, 5 MB goal, 12 P
...
gc 8 @2.374s 0%: 0.003+3.9+0.018 ms clock, 0.042+0.31/6.7/3.1+0.21 ms cpu, 649->649->537 MB, 650 MB goal, 12 P
gc 9 @4.834s 0%: 0.003+7.5+0.021 ms clock, 0.040+0/14/5.1+0.25 ms cpu, 1298->1298->1073 MB, 1299 MB goal, 12 P
gc 10 @9.188s 0%: 0.003+26+0.004 ms clock, 0.045+0/26/0.35+0.053 ms cpu, 1183->1183->746 MB, 2147 MB goal, 12 P (forced)
gc 11 @9.221s 0%: 0.018+9.4+0.003 ms clock, 0.22+0/17/5.0+0.043 ms cpu, 746->746->746 MB, 1492 MB goal, 12 P (forced)
// With map shards ([]map[int32]int32), GC took 1.017494ms
gc 1 @0.001s 7%: 0.010+2.9+0.048 ms clock, 0.12+0.26/3.6/4.1+0.57 ms cpu, 4->7->6 MB, 5 MB goal, 12 P
...
gc 12 @3.924s 0%: 0.003+3.2+0.004 ms clock, 0.040+1.2/7.5/14+0.048 ms cpu, 822->827->658 MB, 840 MB goal, 12 P
gc 13 @8.096s 0%: 0.003+6.1+0.004 ms clock, 0.044+6.0/14/32+0.053 ms cpu, 1290->1290->945 MB, 1317 MB goal, 12 P
gc 14 @11.619s 0%: 0.003+1.2+0.004 ms clock, 0.045+0/2.5/3.7+0.056 ms cpu, 1684->1684->1064 MB, 1891 MB goal, 12 P (forced)
gc 15 @11.628s 0%: 0.003+0.91+0.004 ms clock, 0.038+0/2.3/3.6+0.057 ms cpu, 1064->1064->1064 MB, 2128 MB goal, 12 P (forced)
从倒数第三轮内存最大的时候看,GC worker 的耗时都是接近的;唯一差异较大的,是 markTermination 阶段的 STW 时间,shard 方式下少了 1/10,因此推测和该阶段得到优化有关。
至于这个时间为什么能减少,我也不清楚为什么(这个坑挖得太深,只能以后找到资料再来填...)
2.
言归正传(众人:什么?!前面写这么多你还没进入正文。我:咳..咳..),我们总结下用 map 实现内存池的要点:
内存池用 map 不用 sync.Map;map 要加读写锁 map 尽量存非指针(key 和 value 都不包含指针) map 里存放指针,需要注意 keys 过多会带来的 GC 停顿问题 使用 shards map
然后我们看看,这个定义在 lru/lru.go 里:
// Cache is an LRU cache. It is not safe for concurrent access.
type Cache struct {
cache map[interface{}]*list.Element
}
从 cache 的定义可以看出,这是我们说的 map 里包含指针的情况,而且还是不分 shards 的。所以如果你单机 GroupCache 里 keys 过多,还是要注意下用法的。
注:截止目前 1.14,map 里包含指针时 idle worker 耗时问题还未有结论,有兴趣可以参考 里面的例子和现象。
3.
相比分布式场景的 GroupCache,如果你本地依然有千万级的 keys,那推荐你用 bigcache。无数经验证明,超大 map 的内存池导致的 GC 延迟,是可以通过切 bigcache 解决的。那 bigcache 到底怎么做到的?
简单来说:shards map + map[uint]uint + []byte + free link = BigCache
-
定义 shards cache,避免锁粒度过大 -
map 里只存放 uint 避免指针 -
实现一个 queue 结构(实际是[]byte,通过 uint 下标追加分配) -
采用 free 链机制,删除保留空洞最后一起回收(这块逻辑还蛮复杂的,先留个不大不小的坑吧...)
其内存池定义如下:
type cacheShard struct {
hashmap map[uint64]uint32 // key在entries中的位置
entries queue.BytesQueue // 实际是[]byte,新数据来了后copy到尾部
}
这样 GC 就变成了map 无指针+[]byte 结构的扫描问题了,因此性能会高出很多。
坑 4: 两种方式(GroupCache 和 BigCache)对具体业务到底有多大影响?
上面只是 map 实现内存池的模拟分析,以及两种典型 Cache 库的对比。如果你也和我一样,问自己“具体两种 Cache 对业务有多大影响呢”?那只能很高兴的对你说:欢迎来到坑底 -_-
我们线上大概需要单机缓存 1000 万左右的 keys。首先我尝试模拟业务,向两种 Cache 中插入 1000w 数据来测试 GC 停顿。然而因为实验代码或其他未知的坑,最后认为这个方法不太可侧
最后讨论,觉得还是用老办法,用 Prometheus 的 histogram 统计耗时分布。我们先统计底层存储(Redis)的耗时分布,然后再分别统计 BigCache 和 GroupCache 在写入 500w 数据后的实际情况。分析结论可知:
40ms 以上请求
从 redis 数据看,40ms 以上请求占比0.08%;BigCache 的 40ms 以上请求占0.04%(即相反有一半以上超时请求被 Cache 挡住了) GroupCache 则是0.2%,将这种长时间请求放大了1倍多(推测和 map 的锁机制有关)
10ms-40ms 请求
redis 本身这个区间段请求占比24.11%;BigCache 则只有15.51%,相当于挡掉了33%左右的高延迟请求(证明加热点 Cache 还是有作用的) GroupCache 这个区间段请求占比21.55%,也比直接用 redis 来得好
详细数据分布:
redis [ 0.1] 0.00%
redis [ 0.5] 0.38%
redis [ 1] 3.48%
redis [ 5] 71.94%
redis [ 10] 22.90%
redis [ 20] 1.21%
redis [ 40] 0.07%
redis [ +Inf] 0.01%
bigcache [ 0.1] 0.40%
bigcache [ 0.5] 16.16%
bigcache [ 1] 14.82%
bigcache [ 5] 53.07%
bigcache [ 10] 14.85%
bigcache [ 20] 0.66%
bigcache [ 40] 0.03%
bigcache [ +Inf] 0.01%
groupcache[ 0.1] 0.24%
groupcache[ 0.5] 9.59%
groupcache[ 1] 9.69%
groupcache[ 5] 58.74%
groupcache[ 10] 19.10%
groupcache[ 20] 2.45%
groupcache[ 40] 0.17%
groupcache[ +Inf] 0.03%
然而我们测完只能大致知道:本地使用 GroupCache 在 500w 量级的 keys 下,还是不如 BigCache 稳定的(哪怕 GroupCache 实现了 LRU 淘汰,但实际上因为有 Hot/Main Cache 的存在,内存利用效率上不如 BigCache)
分布式情况下,GroupCache 和 BigCache 相比又有多少差距,这个就只能挖坑等大家一起跳了。
4. 对象池与零拷贝
在实际业务中,往往 map 中并不会存储 5000w 级的 keys。如果我们只有 50w 的 keys,GC 停顿就会骤减到 4ms 左右(其间 gc worker 还会并行工作,避免 STW)。
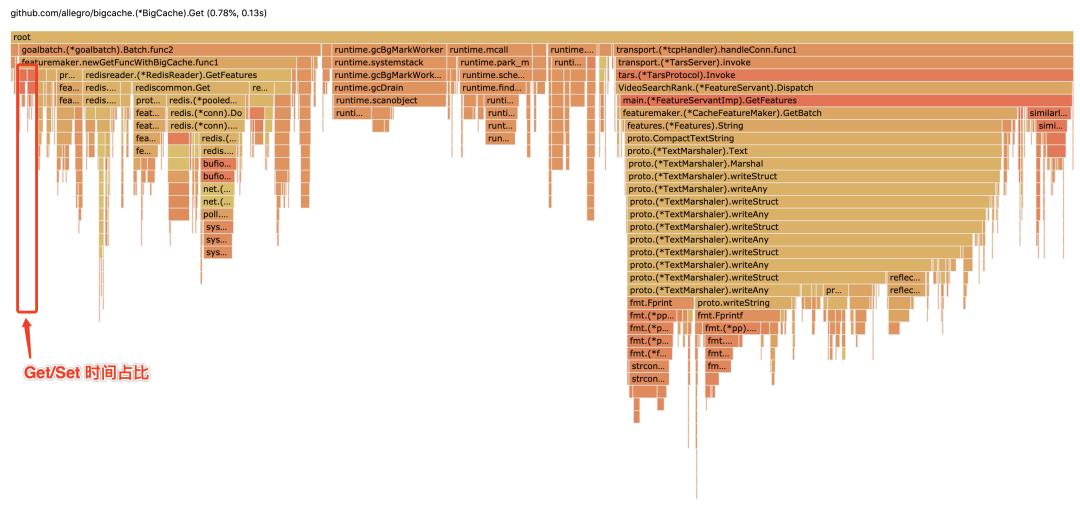
例如无极(腾讯内部的一个配置服务)这类配置服务(或其他高频数据查询场景),往往需要 Get(key) 获取对应的结构化数据。而从 BigCache,CPU 消耗发现(如图),相比网络 IO 和 Protobuf 解析,Get 占用0.78%、Set 占用0.9%,基本可以忽略:
因此优化的思路也很明确,我们参考 GroupCache 的 lru 实现,将 JSON 提前解析好,在业务侧 Get 时直接返回 struct 的指针即可。具体流程不复杂,直接 ppt 截图:
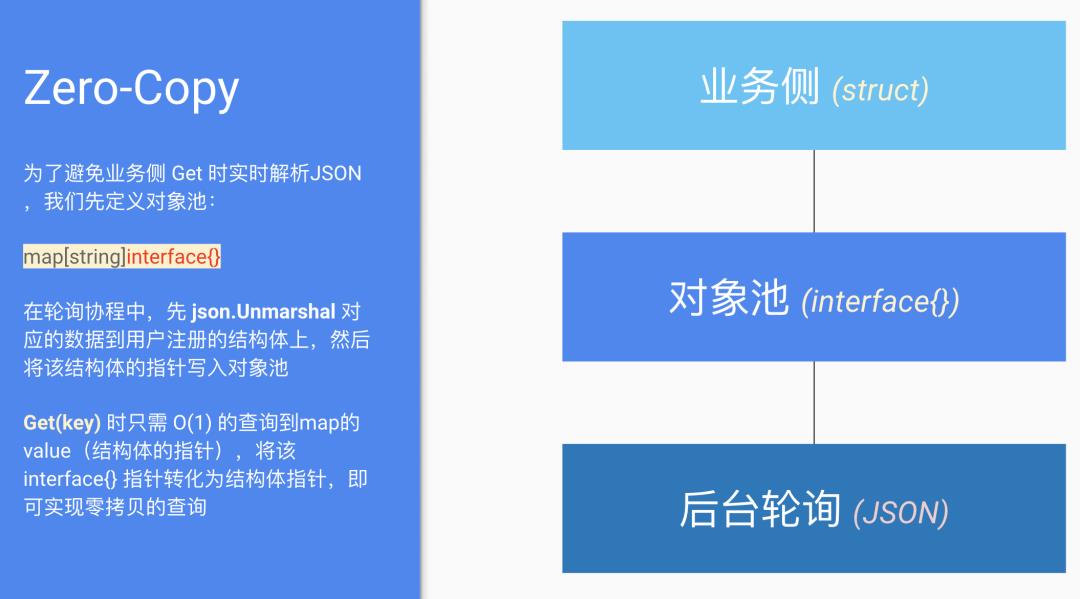
我们把接口设计成注册的方式(注册需要解析 JSON 数据的结构),然后再 Get 时返回该结构的指针实现零拷贝。下面 benchmark 可以反映性能差异和内存分配情况(Client_Get 是实时 JSON 解析,Filter_Get 是优化的对象池 API),可以切实看到0 allocs/op:
goos: linux
goarch: amd64
pkg: open-wuji/go-sdk/wujiclient
BenchmarkClient_Get-8 1000000 1154 ns/op 1.00 hits 87 B/op 3 allocs/op
BenchmarkFilter_Get-8 4899364 302 ns/op 1.00 hits 7 B/op 1 allocs/op
BenchmarkClient_GetParallel-8 8383149 162 ns/op 1.00 hits 80 B/op 2 allocs/op
BenchmarkFilter_GetParallel-8 13053680 91.4 ns/op 1.00 hits 0 B/op 0 allocs/op
PASS
ok open-wuji/go-sdk/wujiclient 93.494s
Success: Benchmarks passed.
目前无极尚未对外开源。对具体实现感兴趣的同学,可以看 gist 中
完整分享 PPT 可在后台回复:go 获取。
以上是关于从入门到掉坑:Go 内存池/对象池技术介绍的主要内容,如果未能解决你的问题,请参考以下文章