前沿技术面向航空关键部件性能测试的多维力加载装置
Posted 壹航智库
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了前沿技术面向航空关键部件性能测试的多维力加载装置相关的知识,希望对你有一定的参考价值。


面向航空关键部件性能
测试的多维力加载装置
航空关键部件的力学性能测试对其优化设计和安全服役至关重要。多数关键部件往往工作在复杂的载荷环境下,例如直升机的弹性轴承会承受压力、弯矩和扭矩组成的压弯扭复合载荷,又如直升机桨叶、航空发动机叶片均承受拉弯扭载荷。为准确掌握关键部件工作时的力学响应和疲劳寿命,确保部件设计的准确性和安全性,需在其力学强度和疲劳寿命试验中对其施加与实际工况相同的多维力复杂载荷。
目前我国对航空零部件力学性能和疲劳寿命的测试方法可分为材料试验机加载和液压作动器加载两类。一方面,通过单轴材料试验机配合定制工装可对待测零、部件单独施加拉(压)力、弯矩和扭矩,逐项测试其在拉伸、弯曲和扭转时的力学性能。但是,由于试验机动态响应较差,使用该方法进行疲劳试验比较困难。另外,该方法无法同时对部件施加拉(压)弯扭组合载荷,在不同载荷下测试时,需要频繁装卸部件,降低测试效率。另一方面,通过在空间布置液压作动器可实现拉(压)弯扭组合加载,并且可开展疲劳试验,但是该方法对不同部件或部件的不同外形状态的适应性较弱,变更待测目标后需对各作动器重新布置,延长测试时间;作动器定位精度也难以保证,不利于加载精度保持,影响测试准确性。
并联机构具备空间六自由度,在工作空间内可任意平移和转动,并且具备结构紧凑、刚度高、误差积累小和动态特性好等优点。连接末端执行器和待测部件,通过二者间的相对位移可实现对部件的多维力加载,也可通过往复运动实现多维力循环加载,为复杂载荷下的力学性能测试和疲劳试验提供新的加载手段。
使用并联机构进行准静态多维力加载引起了国内外部分学者的关注。Masters 等利用并联机构测试建筑结构的刚度特性测试。唐静芳等对六自由度并联机构应用于静态和疲劳加载开展仿真研究。吴乐彬和吴剑等基于Stewart 平台设计多维静态加载机构,对加载机构的轨迹跟踪和单自由度加载稳定性进行提升。尹鹏等基于单轴力闭环控制提出一种正交并联加载系统。徐彬采用 Stewart 平台,分析大型旋挖钻机动臂的加载性能参数。王博等提出了一种基于正交并联机构的多轴加载试验系统,用于模拟对接机构组合体实际受到的复杂载荷。Stokes 等基于六自由度并联机构设计了一种针对脊柱的加载装置,测量动物脊柱的刚度特性。Nierenberger和Flohic 等基于 Stewart 平台对混凝土试验件进行拉 – 剪二维加载试验。孙永生基于 6–UPS 并联机构研制多维力加载材料试验机,郭江真 等使用其对金属材料试件进行拉扭和拉弯扭加载材料试验。王晓飞等基于并联机构提出一种多维力加载过程中被测目标空间位移的测量方法。
不难发现,使用并联机构进行多维力加载可行,但该方法尚未在航空关键部件力学性能测试中开展应用,同时部件性能测试结果也尚未与传统方法对比,测试准确性仍属未知。因此,本文以直升机关键部件——弹性轴承作为测试对象,基于6–SPS 并联机构研制多维力加载装置和空间位移测量装置,测量弹性轴承在压力、弯矩和扭转载荷下的刚度特性,并与传统方法所得结果进行对比,验证多维力加载测试的准确性。
概念设计

测量弹性轴承在压力、弯矩和扭矩组合载荷下的刚度特性,要求多维力加载装置实现以下功能:
(1)可对弹性轴承施加压力、弯矩、扭矩及其组成的多维力载荷。
(2)可实时测量加载装置输出的多维力载荷。
(3)可实时测量弹性轴承在多维力载荷下的空间变形。
因此,加载装置主要由3 部分构成,见图1,分别为多维力加载机构、变形测量机构和三维力传感器。
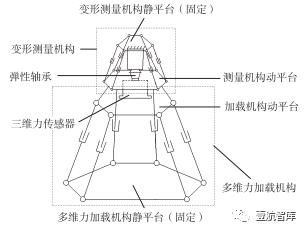
图1 多维力加载装置示意图
Fig.1 Diagrammatic sketch of multi-axis loading device
多维力加载机构基于6–SPS 并联机构研制,由静平台、动平台及 6条运动支链组成,动平台具有空间六自由度,通过动平台与待测部件的多自由度相对位移实现对部件的多维力加载。其中,各运动支链由移动副驱动,两端通过球副与动、静平台相连;同时各移动副均安装位移传感器,实现对其位移闭环控制。
变形测量机构同样基于6–SPS并联机构提出,具备六自由度。该机构不包含动力部件,其动平台与弹性轴承相连,在弹性轴承受载产生弹性变形时产生空间运动,引起6 条支链的长度变化。支链长度实时通过光栅传感器进行测量反馈,并通过正解模型计算动平台位移和姿态,从而获得弹性轴承的空间变形量。
三维力传感器安装于多维力加载机构的动平台,实时测量加载机构输出的轴向力、弯矩和扭矩,结合弹性轴承的变形量分析轴承在承受轴向力、弯矩、扭矩及其组合的多维力载荷时的刚度特性。
参数设计与分析
多维力加载机构和变形测量机构均基于6–SPS 并联机构设计,如图2 所示。
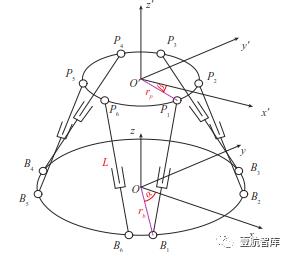
图2 6–SPS并联机构简图
Fig.2 Sketch of 6–SPS parallel mechanism
使用 i(i=1,2,…,6)标识6–SPS 并联机构的运动支链,Bi 和Pi分别为静、动平台上6 个球副的中心点,球副分为3 组均布于固定半径的圆上,rb=‖OBi‖和rp=‖O'Pi‖为静、动平台的球副分布半径,α 和β为每组球副的分布角。在静、动平台上分别建立静、动坐标系O{x,y,z}和O'{x',y',z'},球副分布圆中心O、O' 分别为静、动坐标系的原点,x、x'轴分别是B1B2 和P1P2 的中点,z、z'轴是球副分布平面的法线,根据右手定则即可确定y、y' 轴。
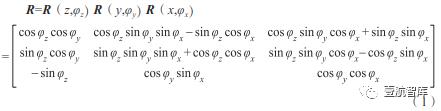
动平台位移由OO' 向量表示,姿态通过动坐标系O'{x',y',z'} 先后绕静坐标系O{x,y,z} 的z、y、x 轴旋转φz、φy 和φx 角度进行定义,所得转换矩阵R 为:
运动学逆解是通过已知的动平台位移和姿态,求解各驱动位移。选取任一矢量闭环O–Bi–Pi–O', 可得向量叠加方程:

其中,li 为支链i 的单位向量;λi 为支链i 长度,随即求出:

运动学正解是已知各驱动位移,求解动平台的位移和姿态。定义动平台的位姿向量Q=[PT,ΘT]T,其中P=[px,py,pz]T 和Θ=[θx,θy,θz]T 分别是动坐标系相对静坐标系的位移和姿态向量。由式(3) 构造方程:

采用牛顿迭代法求解该方程,求解过程如图3 所示。
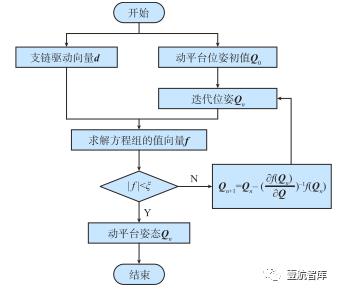
图3 6–SPS并联机构正解流程图
Fig.3 Flowsheet of inverse solution
to 6–SPS parallel mechanism
首先给定动平台初始位姿Q0,然后用牛顿迭代法求出过程中的迭代位姿Qn+1(n ≥0),在第n+1 次迭代中,方程fi(Q)=0 的解的估计值:

当满足迭代终止条件| f(Qn+1)| <ξ=10–10m 时,即可认为此时的迭代位姿Qn+1 是方程(4)的数值解,随即求出动平台的位姿向量Q。
动坐标系原点 O' 受到的外力在Plücker 坐标下可以表示为F=[fT,mT]T,其中f 和m 分别表示力和力矩,各支链的驱动力向量为τ=[τ1,τ2,…,τ6]T。若动平台的位姿产生微小变化δxp=[δpT,δθT]T,则由式(2)求导可得动平台与各驱动的速度映射关系:

式中,δq=[δd1,δd2,…,δd6]T ;Jv 是速度雅可比矩阵。由虚功原理可得:

进一步求得:

其中,Jf=JvT 为力雅可比矩阵。当并联机构处于非奇异位姿时,J 满秩且可逆,此时若已知各支链驱动力τ 即可求得作用于动坐标系原点O' 的外力F,反之亦然。
根据弹性轴承的刚度测试需要,研制图4 所示的多维力加载装置,其性能指标分为输出载荷和工作空间两类,如表1 所示。
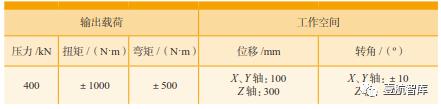
表1 多维力加载装置设计指标
Table 1 Design index of multidimensional force loading device
如图4(a)所示,多维力加载装置安装于外部框架内,其加载机构的静平台安装于框架底面,变形测量机构的静平台安装于框架顶部。加载装置包含6 个液压作动器,其两端分别由球铰链与动、静平台连接,通过作动器的运动实现动平台的多维力加载能力。动平台中心装有三维力传感器,用于反馈加载机构的实际输出力。图 4(b)中,传感器另一端装有弹性轴承的小端工装,与上方固定于框架的大端工装一起实现弹性轴承的稳定装夹。测量机构动平台与小端工装固连,其6 条测量支链同样由球铰链与动、静平台连接,可直接测量加载过程中大、小端工装的相对位移,以排除框架、加载机构和三维力传感器变形对测量的影响。加载装置通过多轴运动控制器(PMAC)完成闭环位置控制、轨迹规划、路径插补、信号采集与滤波等功能。
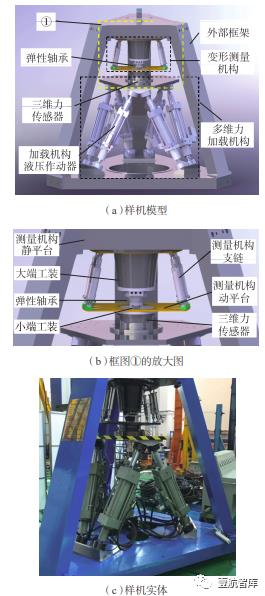
图4 多维力加载装置样机
Fig.4 Prototype of multi-axis loading device
试验与分析
弹性轴承刚度特性的传统测量方法是使用单轴拉伸和扭转试验机配合特制工装进行加载测试,其压缩、弯曲和扭转刚度需使用不同的工装,测试过程中需要频繁拆卸并且无法对弹性轴承施加压弯扭组合载荷,无法获得真实工况载荷下的刚度特性。
使用多维力加载装置开展弹性轴承的刚度测量,仅需单次装卸即可实现对弹性轴承压缩、弯曲和扭转刚度的连续测量,无需更换工装,提高测试效率。本节将对比传统方法和加载装置所得结果的偏差,评估加载装置测量的准确性,同时验证并联机构输出多维力载荷的可行性。
传统方法测量弹性轴承的压缩刚度是使用单轴材料试验机进行轴向力加载(图 5),压力由试验机采集,同时使用激光位移传感器测量弹性轴承的压缩位移,绘制如图6 所示压力 – 变形曲线,对该曲线线性拟合,求得压缩刚度Kz=256.54kN/mm。
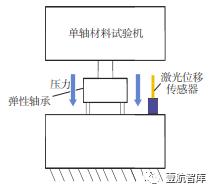
图5 传统压缩刚度测试
Fig.5 Traditional compression stiffness test
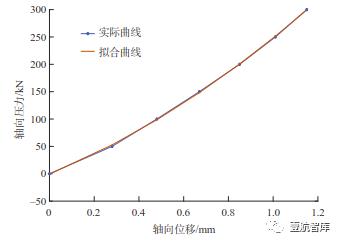
图6 单轴材料试验机的压力–变形曲线
Fig.6 Load-deformation curve in
traditional compression stiffness test
使用多维力加载装置测量时,如图7 所示,可以直接控制加载机构对弹性轴承输出轴向压力,并通过测量机构实时反馈弹性轴承的轴向变形量,绘制如图8 所示压力– 变形曲线。对该曲线进行拟合,可得弹性轴承的压缩刚度K'z=273.5kN/mm,与传统方法所得Kz 吻合程度较高,误差仅为6.6%。

图7 使用多维力加载装置进行压缩刚度测试
Fig.7 Compression stiffness test
by multi-axis loading device
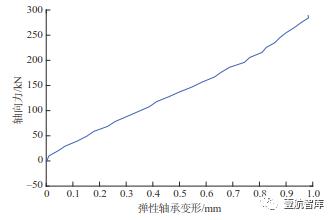
图8 多维力加载装置的压力–变形曲线
Fig.8 Compression-deformation curve
obtained by multi-axis loading device
传统方法测量弹性轴承的扭转刚度(图9),是将弹性轴承安装于扭转试验机上,并在一端安装扭矩传感器实时反馈对弹性轴承施加的扭矩,扭转角直接由扭转试验机获取。绘制如图10 所示的弹性轴承正向和负向扭矩加载时的载荷– 变形曲线,经线性拟合可知,弹性轴承的正向和负向扭转刚度分别为Kθ+zo=18.83N·m/(°)和Kθ–zo=20.23N·m/(°)。
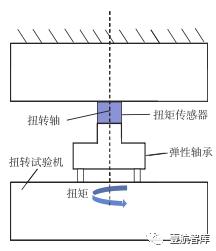
图9 传统扭矩刚度测试
Fig.9 Traditional torsional stiffness test
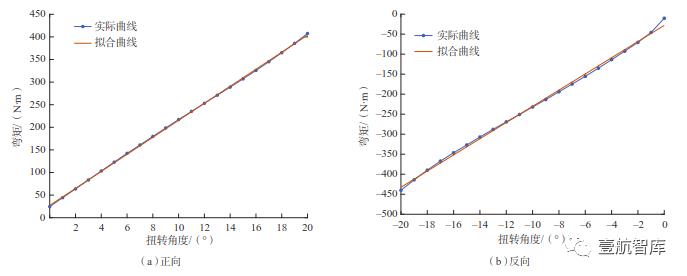
图10 扭转试验机上的扭矩–扭转角曲线
Fig.10 Load–deformation curve in
traditional torsional stiffness test
使用多维力加载装置测量弹性轴承的扭转刚度时,如图 11 所示,无需变更加载设备和工装,直接控制加载机构对弹性轴承施加正向和负向扭矩载荷,并通过力传感器反馈输出扭矩,以及测量机构反馈扭转变形,绘制如图12 所示的正向和负向载荷– 变形曲线,经线性拟合,求得弹性轴承正向和负向的扭转刚度分别为Kθ+z=19.27N·m/(°)和Kθ–z=21.28N·m/(°),与传统方法所得的Kθ+zo 和Kθ–zo 相比,误差分别为2.3% 和5.2%,吻合程度良好。正、反向扭转刚度误差不一致由加载机构和固定工装的间隙引起,使得在扭矩变向时出现一定的非线性。
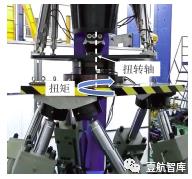
图11 使用多维力加载装置进行
扭转刚度测试
Fig.11 Torsional stiffness test by multi-axis
loading device
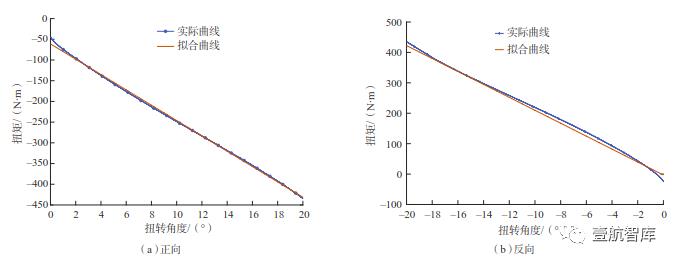
图12 多维力加载装置上的扭矩–扭转角曲线
Fig.12 Torsion–deformation curve
obtained by multi-axis loading device
传统方法测量弯曲刚度(图13),是将弹性轴承的曲率中心通过工装与扭转试验机的扭转轴线重合,由扭转试验机使弹性轴承绕其曲率中心进行弯曲变形。弯矩由扭矩传感器测量,弯曲变形通过扭转试验机的转角进行记录并绘制如图14 所示的弹性轴承正向和负向弯矩加载时的载荷– 变形曲线,经线性拟合可知,弹性轴承的正向和负向弯曲刚度分别为Kθ+yo=51.95N·m/(°)和Kθ–yo =47.35N·m/(°)。
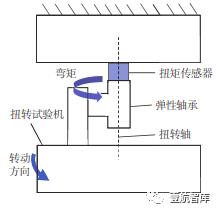
图13 传统弯曲刚度测试
Fig.13 Traditional bending stiffness test
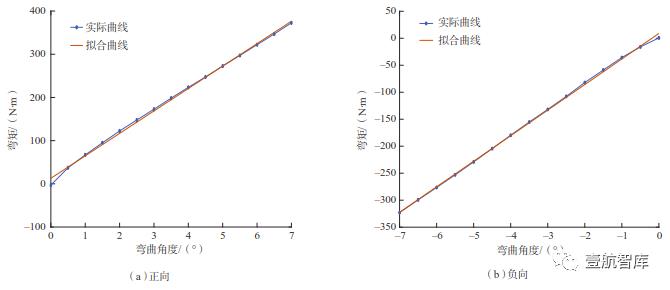
图14 扭转试验机上的弯矩–弯曲角度曲线
Fig.14 Load–deformation curve in
traditional bending stiffness test
为使弹性轴承在纯弯矩下进行变形,需要规划多维力加载装置的纯弯曲加载曲线,规划流程如图15 所示。首先,根据弹性轴承的弯曲变形特征给定初始的弯矩加载轨迹。其次,将初始轨迹进行离散,并控制加载机构动平台依次抵达各离散位姿点。第三,观察在各位姿点时三维力传感器除弯矩外是否包含附加轴向力,若有,对位姿点进行修正,消除轴向力影响;若无,则移至下一个位姿点,直至加载机构在所有位姿点均输出纯弯矩为止。最后,连接所有修正位姿点,获得加载机构的纯弯矩加载轨迹。
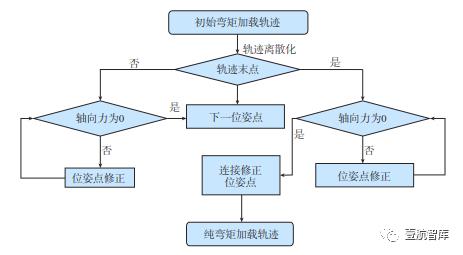
图15 纯弯曲加载的曲线规划流程
Fig.15 Flow chart of planning of
pure bending loading curve
使用多维力加载装置测量弹性轴承的弯曲刚度,如图16 所示,控制加载机构对弹性轴承施加正向和负向的纯弯矩,使用三维力传感器反馈弯矩,通过测量机构记录弯曲变形,绘制如图17 所示的正向和负向弯矩– 变形曲线。经线性拟合,求得弹性轴承正向和负向的弯曲刚度分别为Kθ+y=41.59N·m(/°)、Kθ–y=36.68N·m(/°),与传统方法所得的Kθ+yo 和Kθ–yo 相比,误差分别为19.9% 和22.5%。

图16 使用多维力加载装置进行弯曲
刚度测试
Fig.16 Bending stiffness test by multi-axis
loading device
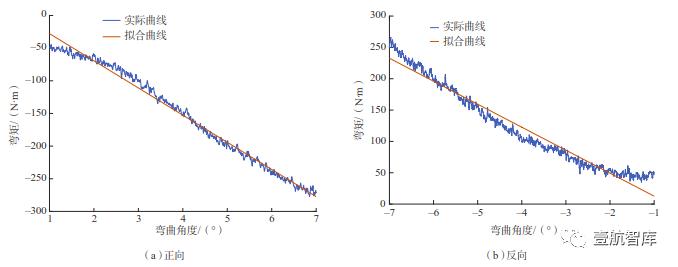
图17 多维力加载装置上的弯矩–弯曲角度曲线
Fig.17 Bending moment–deformation
curve obtained by multi-axis loading device
传统方法虽将弹性轴承小端的曲率中心与扭转试验机的扭转轴重合,但大端的变形轨迹不为圆,会引入轴向力干扰,无法实现纯弯矩加载。同时使用扭转试验机转角表示弯曲变形角度也并不准确。相反,多维力加载装置对弹性轴承可实现纯弯矩加载,而且测量机构直接反馈弯曲变形,虽然与传统方法所得结果偏差明显,但可以更准确地反映弹性轴承的弯曲变形情况。
END




以上是关于前沿技术面向航空关键部件性能测试的多维力加载装置的主要内容,如果未能解决你的问题,请参考以下文章