工业机器人性能测试-常用位姿表示法
Posted 机器人国评中心
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了工业机器人性能测试-常用位姿表示法相关的知识,希望对你有一定的参考价值。
在使用绝对激光跟踪仪实施标准GB/T 12642-2013/ISO9283:1998(工业机器人性能规范及其实验方法)(以下简称标准)时,位姿准确度是体现工业机器人性能的重要指标之一,而不同品牌的工业机器人对于位姿的表示方法不尽一致,在确定机器人测量位姿点后需根据机器人程序中位姿表示方法进行修改。工业机器人常用的位姿表示方法包括D-H参数、关节角、旋转矩阵、欧拉角、四元数等,其中关节角和旋转矩阵在进行操作臂运动学解算时作为重要运算符使用较多,而在测量实践中则使用D-H参数、欧拉角和四元数较多。
D-H参数(Denavit-Hartenberg参数)用来描述工业机器人操作臂连杆的位姿关系,一组D-H参数即可代表机器人各关节轴的初始位置,在进行工业机器人性能测试时通常使用D-H参数来创建机器人模型。
图1 D-H参数连杆表示法
D-H参数包括连杆偏距、关节角、连杆长度、连杆转角。连杆偏距表示沿两个相邻连杆公共轴线方向的距离,关节角表示两相邻连杆绕公共轴线旋转的夹角,连杆长度指两相邻关节轴之间的公垂线长度,连杆转角指的是两相邻旋转轴线的夹角(在平行于两轴线的平面上的投影的夹角)。
欧拉角在数学上有着非常广泛的应用,在工业机器人性能测试中,可以非常方便地用来表示各个关节的位姿变化。如下图所示,欧拉角表示坐标系绕X、Y和Z轴旋转的角度,由旋转的顺序的差异,其结果也不同,使用较多的有Z-Y-X欧拉角(),即依次绕Z轴、Y轴和X轴旋转。值得注意的是,每次旋转所绕的轴的方位取决于上次的旋转而并非是绕固定坐标系的旋转。著名的FANUC工业机器人便是使用欧拉角表示法。
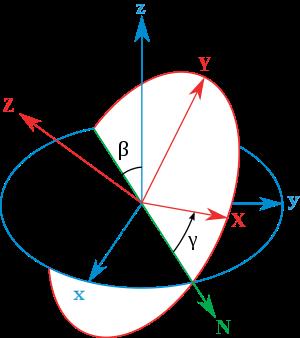
图2 D-H欧拉角
在工业机器人轨迹规划中,欧拉角有时会引起空间奇异问题:当XY平面与Z轴平行时,会失去一个自由度,从而导致此时的旋转会有无穷解,因此,许多工业机器人也使用另一种姿态表示法即四元数表示法。一个四元数可以表示为:

其中i、j、k表示一组两两正交的单位虚数,且有如下关系:
当使用q来表示旋转时,其几何意义表示为通过等效旋转轴
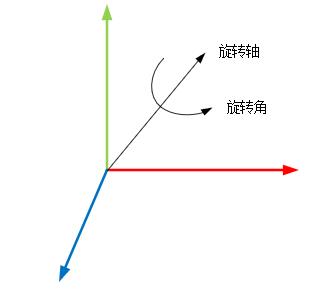
图2 等效旋转
四元数表示法可以避免空间奇异问题,其插值较为平滑,但是略显复杂,著名的ABB机器人则采用了四元数表示法。
在使用Leica绝对激光跟踪仪AT960配合HEXAGON Robodyn套件实施标准前,首先便要对机器人的D-H参数进行标定,使得机器人的实际零位位姿与模型中的初始位姿保持一致,并将标定结果中的工具坐标系的位置坐标与姿态角输入到机器人示教器的工具坐标系中,为标准的实施做准备。
通过激光跟踪仪等机器人性能测量仪器对工业机器人性能指标进行测试,可用于工业机器人轨迹规划与控制算法研究,可以评估工业机器人性能优劣,为进一步提高机器人整机性能提供指导。中国软件评测中心是首批国家授牌的第三方机器人检验检测服务机构,获国家认监委授予的“国家机器人质量监督检验中心(北京)”,是专门从事机器人、智能装备产品及集成应用系统检测、认证、标准、咨询、培训的第三方服务机构,可以为工业机器人、服务机器人、物流机器人、特种机器人及其他智能装备提供整机、关键零部件、集成应用系统、软件等第三方质量保障服务。
文字 | 机器人国评中心
编辑 | 朵喵喵
以上是关于工业机器人性能测试-常用位姿表示法的主要内容,如果未能解决你的问题,请参考以下文章