科普自动驾驶汽车的传感器该如何布置?
Posted 公共交通资讯
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了科普自动驾驶汽车的传感器该如何布置?相关的知识,希望对你有一定的参考价值。
来源:一览智车
“无人驾驶汽车的研究越来越多,各环境感知传感器的分布位置也不同,到底这些传感器要遵循一个什么样的布置原则?请看本文介绍。”
传感器介绍
智能驾驶汽车环境感知传感器主要有超声波雷达、毫米波雷达、激光雷达、单/双/三目摄像头、环视摄像头以及夜视设备。目前,处于开发中的典型智能驾驶车传感器配置如表 1所示。
表 1 智能驾驶汽车传感器配置
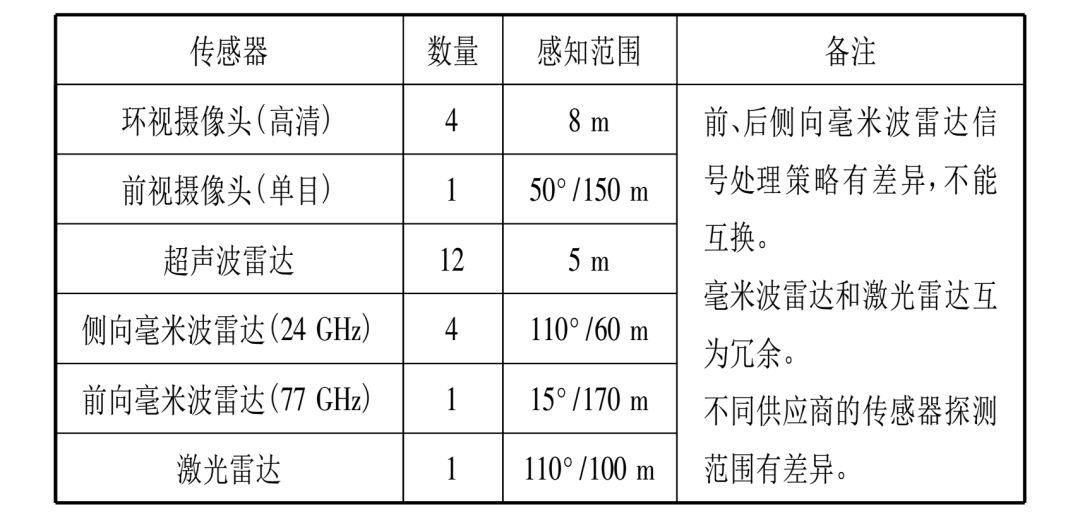
环视摄像头:主要应用于短距离场景,可识别障碍物,但对光照、天气等外在条件很敏感,技术成熟,价格低廉;
摄像头:常用有单、双、三目,主要应用于中远距离场景,能识别清晰的车道线、交通标识、障碍物、行人,但对光照、天气等条件很敏感,而且需要复杂的算法支持,对处理器的要求也比较高;
超声波雷达:主要应用于短距离场景下,如辅助泊车,结构简单、体积小、成本低;
毫米波雷达:主要有用于中短测距的 24 GHz 雷达和长测距的 77 GHz 雷达 2 种。毫米波雷达可有效提取景深及速度信息,识别障碍物,有一定的穿透雾、烟和灰尘的能力,但在环境障碍物复杂的情况下,由于毫米波依靠声波定位,声波出现漫反射,导致漏检率和误差率比较高;
激光雷达:分单线和多线激光雷达,多线激光雷达可以获得极高的速度、距离和角度分辨率,形成精确的 3D 地图,抗干扰能力强,是智能驾驶汽车发展的最佳技术路线,但是成本较高,也容易受到恶劣天气和烟雾环境的影响。
不同传感器的感知范围均有各自的优点和局限性(见图 1),现在发展的趋势是通过传感器信息融合技术,弥补单个传感器的缺陷,提高整个智能驾驶系统的安全性和可靠性。
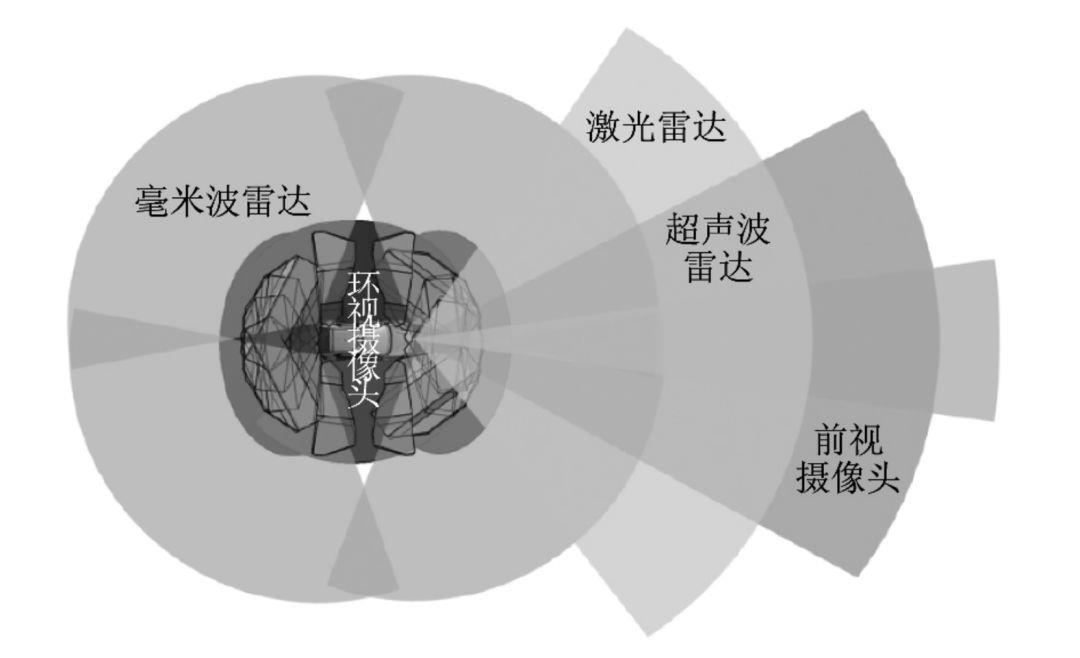
图 1 环境感知传感器感知范围示意图

全新奥迪A8配备自动驾驶系统的传感器包括
-12个超声波传感器,位于前后及侧方
-4个广角360度摄像头,位于前后和两侧后视镜
-1个前向摄像头,位于内后视镜后方
-4个中距离雷达,位于车辆的四角
-1个长距离雷达,位于前方
-1个红外夜视摄像头,位于前方
-1个激光扫描仪Laser Scanner,位于前方
传感器的布置原则
无人车传感器的布置,需要考虑到覆盖范围和冗余性。
覆盖范围:车体360度均需覆盖,根据重要性,前方的探测距离要长(100m),后方的探测距离稍短(80m),左右侧的探测距离最短(20m)。为了保证安全性,每块区域需要两个或两个以上的传感器覆盖,以便相互校验,如下图所示[1]:
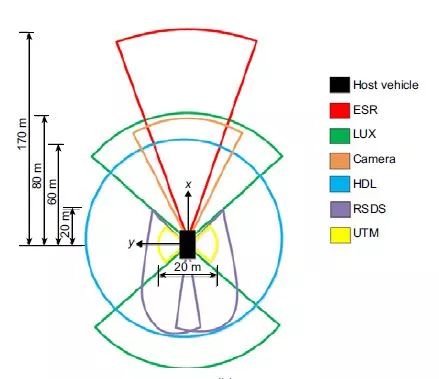
图2: 一种典型的传感器全覆盖、多冗余配置示意图
Host Vehicle是无人车实体,ESR,RSDS是毫米波,UTM、LUX、HDL是激光,Camera是工业相机。从图中也可以看出,各个方向上均有多个传感器配置。为了简洁,图中的Camera只画出了前方的,实际上前后左右Camera配置了很多个,使得系统的冗余度更高。
具体安装在车上,是这样样子的:

图3:传感器在无人车上的实际安装。
大部分传感器都是隐藏式安装(车前保、后保内),
唯一的特例,三维激光安装在车顶上。
前后探测距离的差异,主要是考虑一些特殊场景下的安全问题。
例如,车辆刚驶出高速公路服务区,准备自动变道:初始车速 V1=60km/h;变道过程约需要 t = 3 s;变道完成时与后方车辆的车间时距 τ ≥ 2 s (注 1)左后方来车车速 V2 = 120 km/h;为保证变道安全,本车与左后方车辆的初始安全距离至少为
(V2-V1)×(t+τ)=(120km/h-60km/h)×(3s+2s) ≈ 83m
注1:目前自动变道无相关的法规要求, 故参考 GB /T20608-2006《智能运输系统自适应巡航控制系统性能要求与检测方法》中, 第5.2.2 条对自适应巡航的车间时距做出规定:τ_min 为可供选择的最小的稳态车间时距, 可适用于各种车速 v 下的 ACC 控制。τ_min ( v) 应大于或等于 1 s,并且至少应提供一个在 1.5 ~ 2.2 s 区间内的车间时距 τ。在自动变道场景的计算中,为保证安全,选取 τ = 2 s 进行计算。
一般后向 24 GHz 毫米波雷达的探测距离为 60 m 左右,如果车后安装一台24GZ毫米波雷达,60~83 m 是危险距离。若前后车距在此范围内,开始变道时,系统误判为符合变道条件。随着左后方车辆高速接近,自动变道过程中安全距离不足,本车中途终止变道,返回本车道继续行驶。这种情况会干扰其他车辆的正常驾驶,存在安全隐患,也会给本车的乘员带来不安全感(见图 4)。
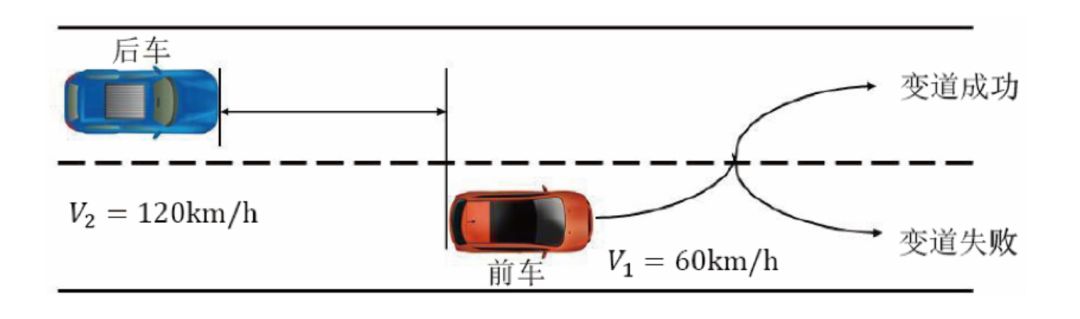
图 4: 自动变道场景
要解决这个极端场景下智能驾驶汽车自动变道的安全问题,可以考虑增加一个 77 GHz 后向毫米波雷达,它的探测距离可以达到 150 m 以上,完全能满足这个场景中 83 m 的探测距离要求。当然,可以采用探测距离达到 100 m 以上的 8 线激光雷达或摄像头( 如 Tesla 车型) 解决 24 GHz 毫米波雷达探测距离不足的问题, 还可以通过控制算法设定车辆必须加速到一定车速才允许自动变道。
而前车安全距离要保证至少100米左右,也保证了车辆有足够的制动时间。
冗余度:谁都不希望把自己的生命交付给一个/种传感器,万一它突然失效了呢?所谓的冗余度,也可以划分为硬件冗余,或软件冗余。
如图1中,前方的障碍物有4类传感器覆盖,这样最大程度上保证前方障碍物检测不会漏检或者虚警。这属于硬件冗余。
再比如车道线检测。现阶段大量的对车道线的检测均是基于视觉(此处不讨论基于激光的传感器),对它的冗余则遵循3选2,或少数服从多数的选择。通过多支算法来保证识别的正确性。
算法设计上用到Sensor Fusion,下图是CMU的多传感器融合的障碍物检测/跟踪框架[2]:
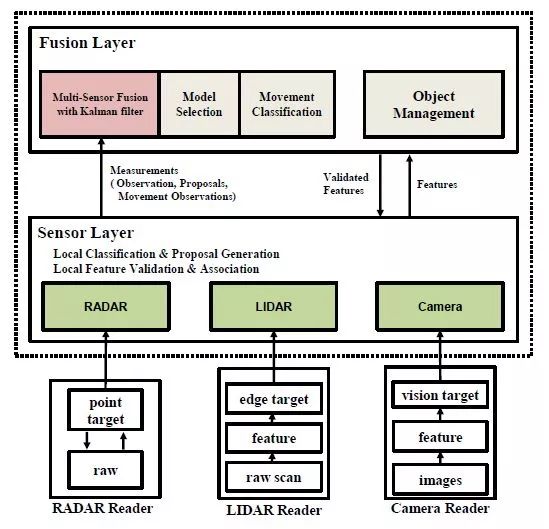
图5:CMU的障碍物检测、跟踪框架。主要分为两层,Sensor Layer负责收集各个传感器测量,并将其抽象为公共的障碍物特征表示;Fusion Layer接收障碍物特征表示,输出最终的障碍物结果(位置、速度、类别等)。
除了要保证覆盖和冗余度,当然在实际安装中,还要符合每个传感器和车辆的安装条件。比如把激光雷达放置在高处,增大了扫描的面积。
智能驾驶车辆的传感器中,以需要考虑因素较多的毫米波雷达布置为例进行介绍。
毫米波雷达的布置
毫米波雷达的位置
(1)正向毫米波雷达
正向毫米波雷达一般布置在车辆中轴线,外露或隐藏在保险杠内部。雷达波束的中心平面要求与路面基本平行,考虑雷达系统误差、结构安装误差、车辆载荷变化后,需保证与路面夹角的最大偏差不超过 5°。
另外,在某些特殊情况下,正向毫米波雷达无法布置在车辆中轴线上时,允许正 Y 向最大偏置距离为 300 mm,偏置距离过大会影响雷达的有效探测范围。
(2)侧向毫米波雷达
侧向毫米波雷达在车辆四角呈左右对称布置,前侧向毫米波雷达与车辆行驶方向成 45° 夹角,后侧向毫米波雷达与车辆行驶方向成 30° 夹角,雷达波束的中心平面与路面基本平行,角度最大偏差仍需控制在 5° 以内。
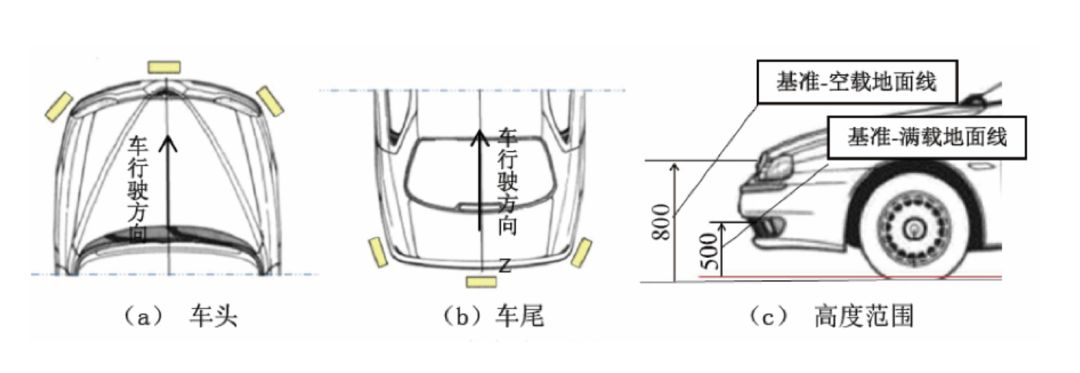
图 6:毫米波雷达位置
(3)毫米波雷达的布置高度
毫米波雷达在 Z 方向探测角度一般只有 ±5°,雷达安装高度太高会导致下盲区增大,太低又会导致雷达波束射向地面,地面反射带来杂波干扰,影响雷达的判断。因此,毫米波雷达的布置高度(即地面到雷达模块中心点的距离),一般建议在 500(满载状态)~800 mm(空载状态)之间(见图 6)。
表面覆盖材料
毫米波雷达大多数情况都是隐藏布置,采用某些不合适的表面覆盖材料会屏蔽毫米波或引起波束畸变、驻波变差,使雷达失效或灵敏度降低。因此选用的覆盖物材料有如下要求。
(1)优先选用 PC、PP、ABS、TPO 等电解质传导系数小的材料,这些材料中不能夹有金属和碳纤维。如果材料表面有低密度金属涂层(如车漆),虽对雷达性能影响不是很大,但必须经过测试才可使用。
(2)覆盖物的表面必须平滑且厚度均匀,不能出现料厚突变或结构复杂的情况,且厚度最好是雷达半波长的整数倍,以减少对雷达波的扭曲和衰减。
另外,覆盖物与雷达面的距离也不能太大,否则雷达容易把覆盖物误判为障碍物。在实际布置中,一般把雷达和覆盖物之间的距离控制在 50~150 mm,如果在造型设计阶段就把毫米波雷达数据输入给造型设计师,经过造型优化,最小距离可控制在 15 mm 左右。
毫米波雷达布置其他参考因素
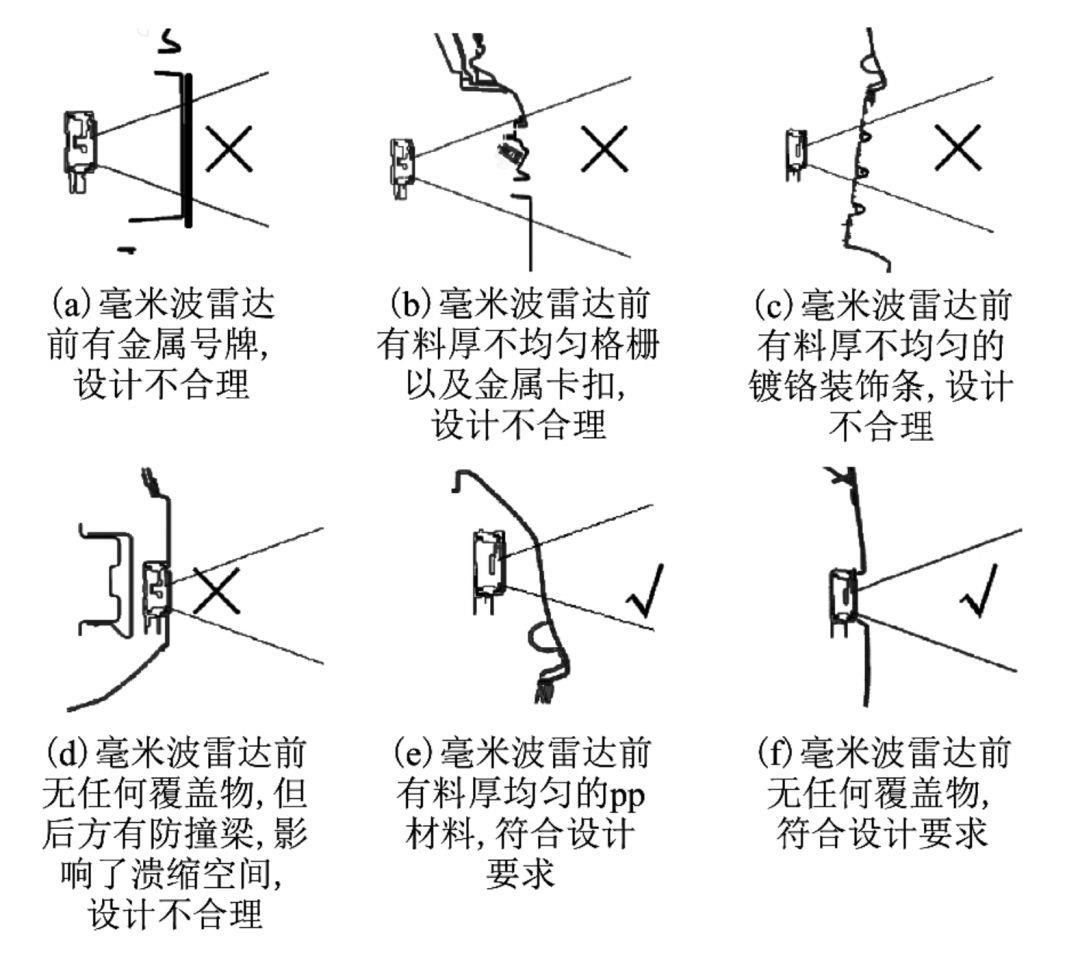
图 7: 毫米波雷达布置示例
除以上毫米波雷达本身要求外,在布置时,还需要兼顾考虑其他因素,如:雷达区域外造型的美观性、对行人保护的影响、设计安装结构的可行性、雷达调试的便利性、售后维修成本等问题 [5]。以下是一些示例(见图 7)。
智能驾驶车辆只能实现部分场景的自动驾驶,为了能适应更多场景,一方面,可以配置性能更好或数量更多的环境感知传感器;另一方面,从降低整车成本考虑,还可以从传感器的布置优化方向入手,充分发挥传感器的性能。
参考文献:
[1] J. Xue, D. Wang, S. Du, D. Cui, Y. Huang and N. Zheng, “A vision-centered multi-sensor fusing approach to self-localization and obstacle perception for robotic cars,” Frontier of Information Technology & Electronic Engineering (FITEE), 2017, 18(1), pp. 122-138, 10.1631/FITEE.1601873.
[2] H. Cho, Y. W. Seo, B. V. K. V. Kumar and R. R. Rajkumar, "A multi-sensor fusion system for moving object detection and tracking in urban driving environments," 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014, pp. 1836-1843.
[3] 王艺帆.自动驾驶汽车感知系统关键技术综述 [J].汽车电器,2016(12):12 ~ 16.
[4] 沈峘.智能车辆视觉环境感知技术的研究 [D].南京:南京航空航天大学,2010.
[5] 陈晓伟.汽车前方车辆识别的雷达和视觉信息融合算法开发 [D].吉林:吉林大学,2016.
[6] Araki H,Yamada K,Hiroshima Y et al. Development of rear-end collision avoidance system [C]. Intelligent Vehicles Symposium Proceedings of IEEE, 2002: 224 ~ 229
[7] 付银玲.长测距雷达在轿车上的布置应用 [J].上海汽车,2012(7):15 ~ 18.
[8] 王群,钱焕延.车联网体系结构及感知层关键技术研究 [J].电信科学,2012,28(12):1-9.
以上是关于科普自动驾驶汽车的传感器该如何布置?的主要内容,如果未能解决你的问题,请参考以下文章