自动驾驶成本控制 - 系统仿真层次分析
Posted 焉知自动驾驶
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶成本控制 - 系统仿真层次分析相关的知识,希望对你有一定的参考价值。
来源:燃云汽车
提要:本文提到的思想作者已经放弃,仅可作为参考
近日德国汽车技术公司大陆集团CEO ElmarDegenhart博士在接受记者采访时表示, L4级别的自动驾驶市场商业化发展需要时间,“到2030年前,预计自动驾驶市场的发展仍然主要依靠辅助系统驱动,人们将借助各种辅助的传感器,来提高驾驶的安全。对辅助驾驶方面的需求会促进细分市场的发展。”

谷歌母公司Alphabet旗下自动驾驶部门Waymo开始销售激光雷达等硬件的消息也印证了自动驾驶还远未商业化的事实。据数据统计,L4级别自动驾驶的准入门槛预计为10亿美元加上至少1000人的软件团队。

企业净增长的需求要依靠开源节流来实现,2018、2019年是自动驾驶产业的洗牌年,在2020年量产L4的底牌已经无法打出的时候,许多创业公司已经由原来的自动驾驶平台服务商转向了定制的单一的功能软件开发服务商,转向细分领域的应用。
在大部分L3-L4自动驾驶厂商无法快速盈利时,更好的进行成本控制就成为了重中之重,据市场上进行候选人交易的从业者介绍,许多小厂商已经开始在传统零部件部门上挤压成本来哺乳智能网联的业务部门。事实上,除了产品开发中高昂的人力成本,产品开发技术和基础设施成本也占据了重要的位置。
对于一个完整的自动驾驶系统来说,分为系统开发、软件开发和硬件开发三个部分,良好的系统开发对于软件和硬件都具有良好的辅助作用,系统仿真对于成本的降低更是发挥了重要的作用。
在某一线城市的自动驾驶试验场中,单一车辆每天使用场地加相关道具的金额已经达到了100000人民币,对于动辄几十万公里的路测里程数来说,单独每年的实验费用就将达到几亿人民币的规模,系统仿真在很大程度上让路测的成本变成了显卡的成本,每家厂商也都在积极推进这一进程,尽管如此,在许多现有的开发方案中依然存在不必要发生的成本问题。

在最新版本的预期功能安全中提到了仿真对于复杂系统开发的意义,但美中不足的是法规中建议的方法可以称为局部最优解,但全局最优解依然需要各家厂商依靠自家产品进行摸索,基于场景的仿真方法在泛化未知路况用例的条件下几乎是唯一的选择,但随之而来的问题也让人十分头痛。
对于自动驾驶系统仿真来说,当下最大的挑战在于:
缺乏Critical仿真泛化
存在过多无效的仿真
两个问题都可以使用后验数据分析的方式得到解决,但使用后验方式进行经验积累的方式往往带来了时间和成本的大量消耗。目前国际上在仿真场景方面目前基本上使用了OpenDrive、OpenScenario两种数据格式,方便部分厂商使用服务外包的形式获取场景数据库。
试想一下,一个中国工程师的成本大约是一个印度工程师的三倍,即1中 = 3印。
基于这种考虑,印度成为了首当其冲的场景库工厂,成本被成倍的降低,看上去皆大欢喜。但事实并没有那么乐观,每个印度工程师的工作产出大概为一天4-5个场景,即10000公里左右的里程数,相对于几亿公里数的要求,九牛一毛的工作量对应上巨额的工作时间,又输出的巨额的成本,当然,其中还包括大量的无效数据。
为了解决这一问题,我们需要一种基于先验逻辑的方式,用来更好地泛化场景,解决成本控制的问题。也就是说,我们需要一个基于先验逻辑的框架,增加仿真效能。
在预期功能安全的规范中,对于场景相关的定义存在几个概念,从大到小分别为Use case, Scenario, Situation, Scene。事实上,仅仅在最小单元的Scene的概念中,就存在着Dynamic Elements, Scenery, Self-representations of actors and observers等第二层级的影响因子,在第三层级更是存在这8种不同的影响因子,对于不同影响因子的实施都会导致全局的变化,如何确定影响因子的权重来选择相关场景的泛化就成为了采购相关场景服务的重要输入。
在查阅了许多相关资料后选择了一种基于数学模型的方式进行了场景的系统架构进行实验,使其符合ODD系统设计的前提下增加相关重要影响因子的权重:
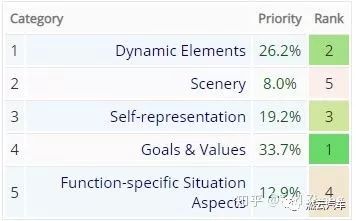
以及相关影响因子的特征矩阵:
在进行数学模型的场景泛化中,我并没有加入预期功能安全中对应的Trigger的概念,以此提升结构的清晰性。通过实验的结果可以看出仅仅在Scene的最小概念下,在第二层系统中已经得出了相对精确的结果,相对于均值场景泛化每个影响因子都会较最大影响因子减少大量的泛化需求,节约了约50%的有效场景需求量。
若放置在10000个场景的条件下,即可解决5000个冗余场景问题,相当于3个印度工程师3年的工作量,约等于60万人民币,那么如果场景库变为更大的数量级,相关场景的影响因子更加复杂,相关的成本将会出现更明显的下降。
尽管此方法可以很大程度上降低成本的消耗,但也有其致命的缺陷,先验逻辑往往伴随着主观的判断,在自动驾驶系统存在神经网络不确定因素的前提下工程师的经验就成为了先验工作法的重要影响因子,解决这种问题的唯一方式就是借鉴资深工程师的经验,搭配后验的数据分析,完成Fine Tuning。
最终,在与同事长时间的讨论后我最终还是放弃了这种方法,选择了更加笨重的影响因子等权重的分配方式,放弃的原因在于经验的不足,在ODD和ODER的系统设计思想下更趋近于确认目标的产品开发,如果过早在系统中加入人为经验的因素,很有可能造成安全的设计隐患,遂放弃。
用成本换安全!
长按图中二维码 or点击左下角“阅读原文”,了解详细议程
以上是关于自动驾驶成本控制 - 系统仿真层次分析的主要内容,如果未能解决你的问题,请参考以下文章