自动驾驶基础(六十) -惯性测量单元(IMU)六
Posted 模拟世界
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶基础(六十) -惯性测量单元(IMU)六相关的知识,希望对你有一定的参考价值。
前面介绍了常用定位方法中的GNSS RTK定位。GNSS 在卫星信号良好时可以提供厘米级定位,但地下车库和城市楼宇之间等卫星信号丢失或者信号微弱的场景提供的定位精度会大大下降。惯性导航可以不依赖外界环境提供稳定的信号,但它会有累积误差。
通过 IMU 与 GNSS 信号进行融合后组成惯性组合导航系统,可以发挥两者优势,并规避各自劣势。通过整合 GPS 与IMU,汽车可以实现既准确又足够实时的位置更新。
惯性导航(inertial navigation system,INS)是一种使用了惯性测量单元(inertial measurement unit, IMU)的以加速度测量为基础的导航定位方法。它不依赖于外部信息、也不向外部辐射能量的自主式导航系统,不受外界天气状况等影响。
我们需要将测量值转换为全局坐标系,这种转换需要一个名叫陀螺仪的传感器,三轴陀螺仪的三个外部平衡环一直在旋转,但三轴陀螺仪的旋转轴始终固定在世界坐标系中,计算车辆在坐标系中的位置是通过测量旋转轴和三个外部平衡环的相对位置来计算的。加速度计和陀螺仪是惯性测量单元(或IMU)的主要组成部分.所以惯性导航系统除了可以获得车辆的位置和姿态外,还能够实时、准确的测量车辆坐标系内三个方向的加速度、角速度等信息,供决策控制系统精准控制车辆。
如前面介绍过的,IMU的全称是inertial measurement unit,即惯性测量单元,通常由陀螺仪、加速剂和算法处理单元组成,以智能方式融合了精密陀螺仪、加速度计、磁力计和压力传感器的多轴组合,通过对加速度和旋转角度的测量得出自体的运动轨迹,即使在复杂工作环境中以及在动态或极限运动动态下,精密的 IMU 也能提供所需的精度水平,在导航中有着很重要的应用价值。我们把传统的IMU和与车身、GPS等信息融合的算法组合在一起的系统称为广义的、针对自动驾驶的IMU。
IMU的主要特征在于高频更新,更新速度达到1000赫兹,所以IMU所提供的位置几乎是实时位置信息。
惯性导航在自动驾驶定位系统中具有不可替代性。惯导具有输出信息不间断、不受外界干扰等独特优势,可保证在任何时刻以高频次输出车辆运动参数,为决策中心提供连续的车辆位置、姿态信息,这是任何传感器都无法比拟的。
GNSS+IMU 方案是一种最常用的组成组合惯导系统的方案。GNSS 在卫星信号良好时可以提供厘米级定位,但地下车库和城市楼宇之间等卫星信号丢失或者信号微弱的场景提供的定位精度会大大下降。惯导可以不依赖外界环境提供稳定的信号,但它会有累积误差。
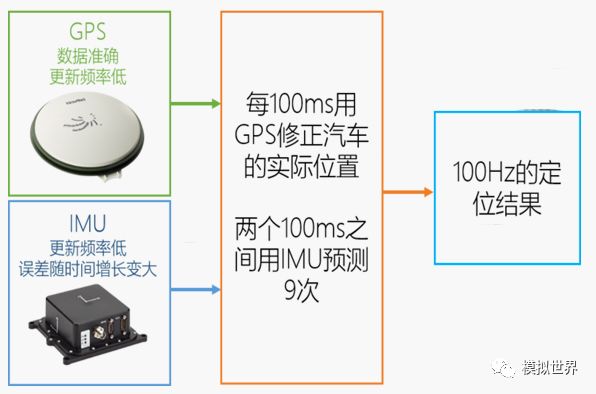
通过 IMU 与GNSS 信号进行融合后组成惯性组合导航系统,可以发挥两者优势,并规避各自劣势。通过整合 GPS 与IMU,汽车可以实现既准确又足够实时的位置更新。GPS是一个相对准确的定位用传感器,但是它的更新频率过低(仅有 10Hz)不足以提供足够实时的位置更新,IMU 的更新频率可以达到 100Hz 或者更高的1000赫兹,完全能弥补 GPS 所欠缺的实时性。GPS/IMU组合系统通过高达 100Hz 频率的全球定位和惯性更新数据,可以帮助自动驾驶完成定位。
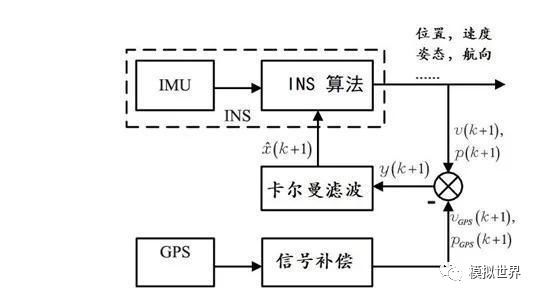
在卫星信号良好时,INS 系统可以正常输出得到 GPS 的厘米级的定位;而卫星信号较弱时,惯导系统可以依靠 IMU 信号提供定位信息。通过整合GPS与IMU,我们可以为车辆定位提供既准确又足够实时的位置更新。
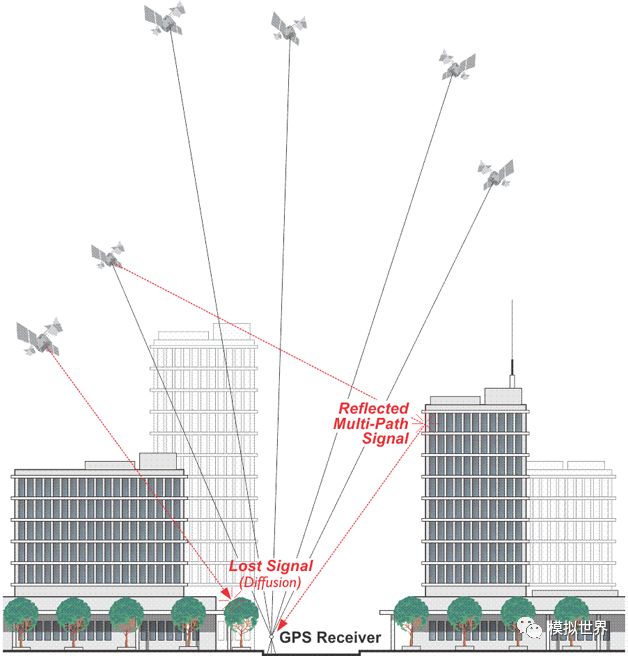
目前的GPS有很多时候是精度不够准确或者无效的。例如在隧道中,我们经常因为信号不好无法使用。在市中心的高楼里,GPS信号容易被折射反射。这个时候IMU就可以增强GPS的导航能力。例如,在车道线识别模块失效时,利用失效之前感知到的道路信息和IMU对汽车航迹的推演,仍然能够让汽车继续在车道内行驶。
GPS和IMU组合,就是为了融合IMU的航向速度、角速度和加速度信息,来提高GPS的精度和抗干扰能力。IMU相对GPS来说,不仅能提供一些信息,还能提供补全导航信息,因为GPS本身只提供位置信息,IMU还可以提供航向姿态信息,这个在车辆控制甚至最基本的车辆控制里也会遇到的信息。因为IMU会提供不同的角度,我们可以非常敏锐实时的监测到车辆姿态的变化,可以更精准的识别一些比较复杂的路况信息。
关于自动驾驶的技术文章,可以参考前文,下面是链接:
关于ADC和DAC转换器电路的基本知识, 可以点击文末左下角链接阅读。
以上是关于自动驾驶基础(六十) -惯性测量单元(IMU)六的主要内容,如果未能解决你的问题,请参考以下文章