如何攻克 Android 调试难题?| 技术头条
Posted CSDN
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何攻克 Android 调试难题?| 技术头条相关的知识,希望对你有一定的参考价值。

作者 | 小南瓜地瓜
责编 | 郭芮
最近在调试项目的亮屏速度,我们希望在按下power键后到亮屏这个时间能达到500MS以内,在Rockchip 3399和3288上面的时间都不能达到要求,因此引发了一系列的调试之路。

计算按下power键到亮屏的时间
android 唤醒时间统计

刚开始的时候,我只在android阶段统计时间,也能看到时间的差异,但是不是最准确的,我统计的时间日志如下:
01-18 09:13:40.992 683 772 D SurfaceControl: Excessive delay in setPowerMode(): 743ms
01-18 09:13:45.304 683 772 D SurfaceControl: Excessive delay in setPowerMode(): 757ms
01-18 09:13:49.559 683 772 D SurfaceControl: Excessive delay in setPowerMode(): 725ms
01-18 09:18:27.461 683 772 D SurfaceControl: Excessive delay in setPowerMode(): 741ms
01-18 09:18:32.766 683 772 D SurfaceControl: Excessive delay in setPowerMode(): 743ms
01-18 09:18:35.861 683 772 D SurfaceControl: Excessive delay in setPowerMode(): 745ms
01-18 09:18:38.345 683 772 D SurfaceControl: Excessive delay in setPowerMode(): 733ms
Kernel从Power到亮屏的时间统计
后来同事中的精英古总在他的代码上加入了从按下Power键到亮屏的时间,直接通过printk打印,代码如下:
diff --git a/drivers/gpu/drm/panel/panel-simple.c b/drivers/gpu/drm/panel/panel-simple.c
old mode 100644
new mode 100755
index 17c3b94..2b39662
--- a/drivers/gpu/drm/panel/panel-simple.c
+++ b/drivers/gpu/drm/panel/panel-simple.c
@@ -504,6 +504,7 @@ static int panel_simple_enable(struct drm_panel *panel)
}
p->enabled = true;
+ printk("%s exit\n", __func__);
return 0;
}
diff --git a/drivers/input/keyboard/rk_keys.c b/drivers/input/keyboard/rk_keys.c
old mode 100644
new mode 100755
index fed5ced..537b599
--- a/drivers/input/keyboard/rk_keys.c
+++ b/drivers/input/keyboard/rk_keys.c
@@ -134,6 +134,10 @@ static void keys_timer(unsigned long _data)
key_dbg(pdata, "%skey[%s]: report event[%d] state[%d]\n",
button->type == TYPE_ADC ? "adc" : "gpio",
button->desc, button->code, button->state);
+ if(strcmp(button->desc, "power") == 0)
+ printk("%skey[%s]: report event[%d] state[%d]\n",
+ button->type == TYPE_ADC ? "adc" : "gpio",
+ button->desc, button->code, button->state);
input_event(input, EV_KEY, button->code, button->state);
input_sync(input);
}

统计每个驱动的resume函数调用时间
上面的时间对我们调试非常有用,然后就需要细分到每个驱动的resume函数执行的时间,用的方法是我之前写过的,大概统计了下TP,LCD,sensor的resume时间,发现TP和LCD占用的时间非常多,然后跟同事一起看了下,同事把TP resume里面的代码用工作队列实现后速度明显有了提升。
然后有很长一段时间不知道干嘛,想打印其他每个驱动的resume时间,一直没找到方法,后面看到一个代码,非常有用。
kernel/drivers/base/power/main.c
static void dpm_show_time(ktime_t starttime, pm_message_t state, char *info)
{
ktime_t calltime;
u64 usecs64;
int usecs;
calltime = ktime_get();
usecs64 = ktime_to_ns(ktime_sub(calltime, starttime));
do_div(usecs64, NSEC_PER_USEC);
usecs = usecs64;
if (usecs == 0)
usecs = 1;
pr_info("PM: %s%s%s of devices complete after %ld.%03ld msecs\n",
info ?: "", info ? " " : "", pm_verb(state.event),
usecs / USEC_PER_MSEC, usecs % USEC_PER_MSEC);
}
这个函数用来打印resume的函数消耗的时间,但是如何去触发打印这个函数呢?
一定保证设备进入深度睡眠,串口也进入深度睡眠,没有任何打印后。
执行以下命令:
echo N > /sys/module/printk/parameters/console_suspend
//使控制台在suspend最后才关闭,这样可以打印出休眠过程完整信息
echo 1 > /sys/power/pm_print_times
//使能调试变量
打印的LOG类似下面的:
[ 37.031413] bcmsdh_sdmmc_resume Exit
[ 37.082174] PM: resume of devices complete after 78.589 msecs
[ 37.085277] [BT_RFKILL]: ** disable irq
[ 37.087645] Restarting tasks ...

修改Lcd配置减小resume时间
古总在调试过程中展现了非常厉害的功底,第一步就是修改了LCD的参数,让亮屏时间加快。修改如下:
--- a/arch/arm/boot/dts/rk3288-pad.dts
+++ b/arch/arm/boot/dts/rk3288-pad.dts
@@ -169,10 +169,10 @@
dsi,lanes = <4>;
prepare-delay-ms = <20>;
- init-delay-ms = <20>;
- enable-delay-ms = <100>;
- disable-delay-ms = <20>;
- unprepare-delay-ms = <20>;
+ //init-delay-ms = <20>;
+ enable-delay-ms = <1>;
+ disable-delay-ms = <1>;
+ unprepare-delay-ms = <1>;
panel-init-sequence = [
15 32 02 8F A5
15 01 02 83 00

修改DRM 超时时间减小唤醒时间
这是最关键的,DRM框架非常复杂,RK也是从开源的DRM移植过来使用,在DRM部分有个时间超时导致问题,最终跟RK拿到最新的patch让唤醒时间直接加速500MS。
我们在日志下发现问题,并给询问了RK,最终发现这部分代码没有更新到最新的部分。
hi rk:为什么亮屏的时候有时候会打印这句VOP等待超时?请问下这是什么意思。
[ 1211.293492] rockchip-vop ff930000.vop: wait win close timeout
[ 1211.293514] rockchip-vop ff930000.vop: [drm:vop_crtc_enable] Update mode to 1200*1920, close all win
有时候却不会打印。
[ 1216.423283] rockchip-vop ff930000.vop: [drm:vop_crtc_enable] Update mode to 12001920, close all win [ 1223.899741] rockchip-vop ff930000.vop: [drm:vop_crtc_enable] Update mode to 12001920, close all win
[ 1234.386252] rockchip-vop ff930000.vop: [drm:vop_crtc_enable] Update mode to 1200*1920, close all win
patch代码如下:
--- a/drivers/gpu/drm/rockchip/rockchip_drm_vop.c
+++ b/drivers/gpu/drm/rockchip/rockchip_drm_vop.c
@@ -139,6 +139,9 @@
#define to_vop_win(x) container_of(x, struct vop_win, base)
#define to_vop_plane_state(x) container_of(x, struct vop_plane_state, base)
+/*add by VENDOR_PATCH for seep up the drm vop driver at 2018/1/18 for RK Defect #191554, VENDOR_PATCH PAD100-193*/
+#define VENDOR_PATCH
+
struct vop_zpos {
int win_id;
int zpos;
@@ -868,9 +871,15 @@ static void vop_disable_all_planes(struct vop *vop)
vop_disable_allwin(vop);
vop_cfg_done(vop);
+#ifdef VENDOR_PATCH
ret = readx_poll_timeout_atomic(vop_is_allwin_disabled,
vop, active, active,
+ 0, 100 * 1000);
+#else
+ ret = readx_poll_timeout_atomic(vop_is_allwin_disabled,
+ vop, active, active,
0, 500 * 1000);
+#endif
if (ret)
dev_err(vop->dev, "wait win close timeout\n");
}
@@ -2215,20 +2224,36 @@ static size_t vop_crtc_bandwidth(struct drm_crtc *crtc,
u16 htotal = adjusted_mode->crtc_htotal;
u16 vdisplay = adjusted_mode->crtc_vdisplay;
int clock = adjusted_mode->crtc_clock;
+#ifndef VENDOR_PATCH
struct vop *vop = to_vop(crtc);
const struct vop_data *vop_data = vop->data;
+#endif
struct vop_plane_state *vop_plane_state;
struct drm_plane_state *pstate;
struct vop_bandwidth *pbandwidth;
struct drm_plane *plane;
u64 bandwidth;
int i, cnt = 0;
+#ifdef VENDOR_PATCH
+ int plane_num = 0;
+#endif
if (!htotal || !vdisplay)
return 0;
+#ifndef VENDOR_PATCH
pbandwidth = kmalloc_array(vop_data->win_size, sizeof(*pbandwidth),
GFP_KERNEL);
+#else
+ for_each_plane_in_state(state, plane, pstate, i) {
+ if (pstate->crtc != crtc || !pstate->fb)
+ continue;
+ plane_num++;
+ }
+ pbandwidth = kmalloc_array(plane_num, sizeof(*pbandwidth),
+ GFP_KERNEL);
+#endif
+
if (!pbandwidth)
return -ENOMEM;
@@ -2421,7 +2446,10 @@ static void vop_crtc_enable(struct drm_crtc *crtc)
rockchip_set_system_status(sys_status);
mutex_lock(&vop->vop_lock);
vop_initial(crtc);
-
+#ifdef VENDOR_PATCH
+ vop_disable_allwin(vop);
+ VOP_CTRL_SET(vop, standby, 0);
+#endif
VOP_CTRL_SET(vop, dclk_pol, 1);
val = (adjusted_mode->flags & DRM_MODE_FLAG_NHSYNC) ?
0 : BIT(HSYNC_POSITIVE);
@@ -2549,8 +2577,9 @@ static void vop_crtc_enable(struct drm_crtc *crtc)
/*
* enable vop, all the register would take effect when vop exit standby
*/
+#ifndef VENDOR_PATCH
VOP_CTRL_SET(vop, standby, 0);
-
+#endif
enable_irq(vop->irq);
drm_crtc_vblank_on(crtc);
mutex_unlock(&vop->vop_lock);

修改QOS相关代码
QOS为Quality Of Service(服务质量)的简称,对PM QoS而言,表示Linux kernel电源管理相关的服务质量。那到底什么是服务质量呢?
我们知道,Linux PM的主要功能,是节省功耗,但同时,会付出一定的性能代价,例如延迟(latency)增加、吞吐量(throughput)下降。可以把PM当作一种服务,把它对性能的影响,类比为服务的质量(QoS)。对性能的影响越大,QoS越低,反之越高。
我们可以这么认为,我们在某个时候需要增加代码的执行速度,就通过这个去控制CPU的运行策略,这样确保代码可以快速执行。
不过这个方法没有使用到,如果对某个resume时间不是十分满意,可以尝试这个方法。

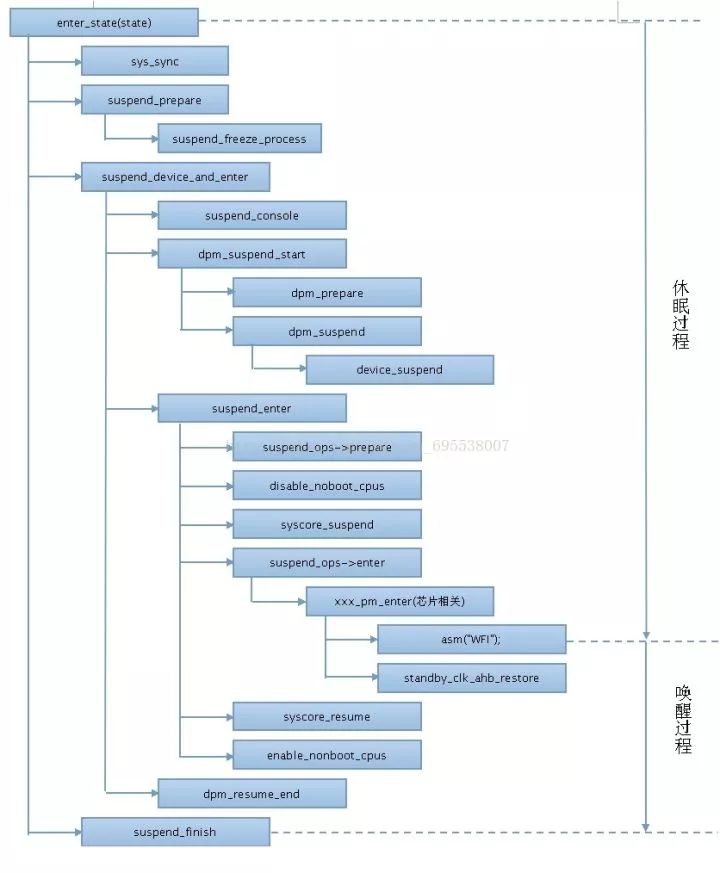
休眠唤醒流程图
从网上拷贝了个休眠唤醒的流程图,如果以后有问题需要分析的话,可以跟进这个流程去排查。
作者简介:韦启发,从事十余年嵌入式领域学习与工作,曾就职于TCL、中兴,从0开始创业开发过产品。目前在500强企业从事嵌入式系统软件开发工作。
本文系作者投稿,版权归作者所有。
热 文 推 荐

print_r('点个好看吧!');
var_dump('点个好看吧!');
NSLog(@"点个好看吧!");
System.out.println("点个好看吧!");
console.log("点个好看吧!");
print("点个好看吧!");
printf("点个好看吧!");
cout << "点个好看吧!" << endl;
Console.WriteLine("点个好看吧!");
fmt.Println("点个好看吧!");
Response.Write("点个好看吧!");
alert("点个好看吧!")
echo "点个好看吧!"
点击“阅读原文”,打开 CSDN App 阅读更贴心!
以上是关于如何攻克 Android 调试难题?| 技术头条的主要内容,如果未能解决你的问题,请参考以下文章