清华大学张涛等 | 基于神经网络的固定时间约束下外骨骼机器人加速度重构方法
Posted 浙大学报英文版
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了清华大学张涛等 | 基于神经网络的固定时间约束下外骨骼机器人加速度重构方法相关的知识,希望对你有一定的参考价值。
中文摘要:
关键词:
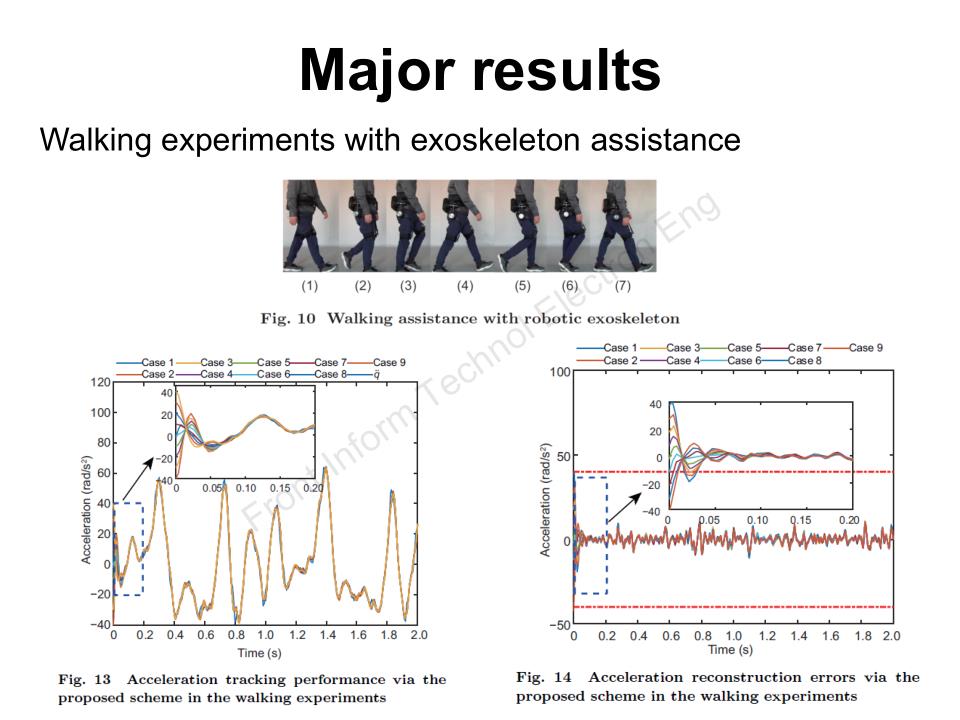
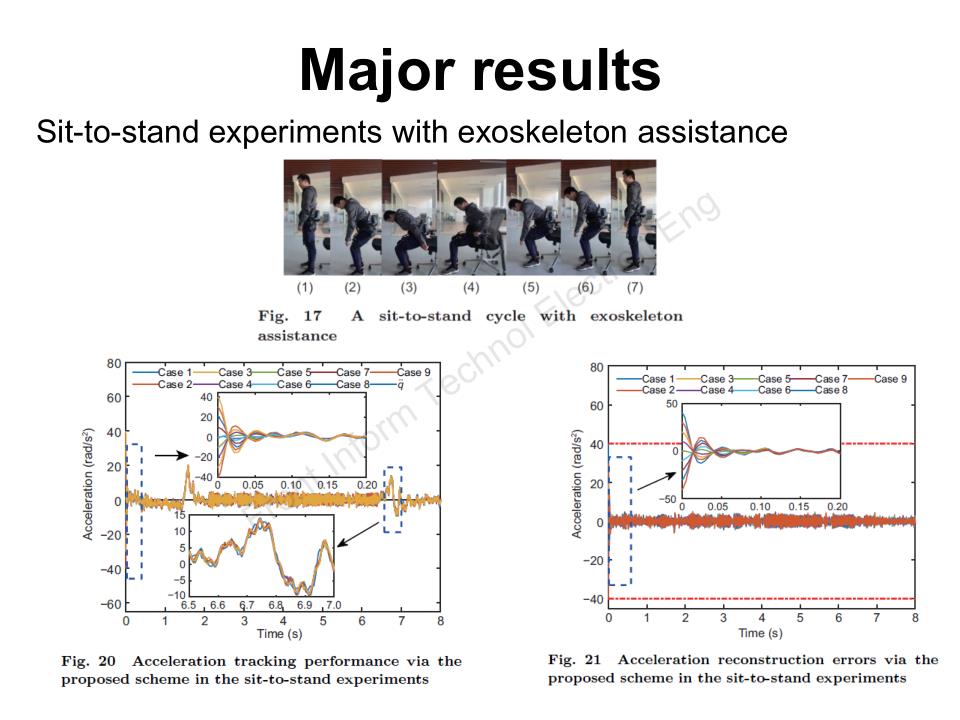
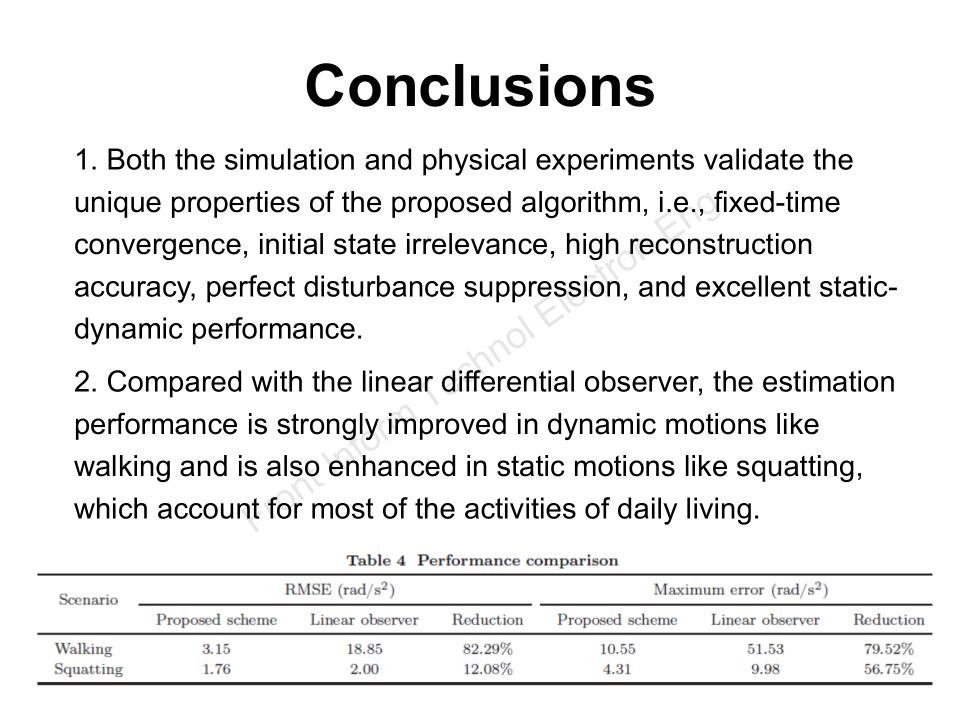
加速度重构;固定时间收敛;约束控制;障碍李雅普诺夫函数;初始状态无关方法;外骨骼机器人 单位: 1清华大学自动化系,中国北京市,1000842佛罗里达国际大学电气与计算机工程系,美国迈阿密,33174 3上海博灵机器人科技有限责任公司,中国上海市,201306 4华中科技大学机械科学与工程学院,中国武汉市,430074 本文引用格式: Tao Xue, Zi-wei Wang, Tao Zhang, Ou Bai, Meng Zhang, Bin Han. Fixed-time constrained acceleration reconstruction scheme for robotic exoskeleton via neural networks[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(5): 705-722. https://doi.org/10.1631/FITEE.1900418 |
点击下方“阅读全文”,下载全文PDF
关于本刊
Frontiers of Information Technology & Electronic Engineering(简称FITEE,中文名《信息与电子工程前沿(英文)》,ISSN 2095-9184,CN 33-1389/TP)是信息电子类综合性英文学术月刊,SCI-E、EI收录,最新影响因子1.033。前身为2010年创办的《浙江大学学报英文版C辑:计算机与电子》,2015年更为现名,现为中国工程院信息与电子工程学部唯一院刊。覆盖计算机、信息与通信、控制、电子、光学等领域。文章类型包括研究论文、综述、个人视点、评述等。现任主编为中国工程院院士潘云鹤、卢锡城,实行国际同行评审制,初次转达意见一般在2~3个月内。文章一经录用将快速在线。
FITEE官网:http://www.jzus.zju.edu.cn
期刊Springer主页:
http://www.springer.com/computer/journal/11714
http://www.editorialmanager.com/zusc
计算机科学与技术学术群 |
光学工程与技术学术群 |
控制科学与技术学术群 |
信息与通信学术群 |
电力电子学术群 |
人工智能学术 |
以上是关于清华大学张涛等 | 基于神经网络的固定时间约束下外骨骼机器人加速度重构方法的主要内容,如果未能解决你的问题,请参考以下文章