公交车、出租车等交通工具的到达时间是影响公众出行的一大因素。所以,预估到达时间(ETA)准确率成为非常实际的研究课题。近日,DeepMind 与谷歌地图展开合作,利用图神经网络等 ML 技术,极大了提升了柏林、东京、悉尼等大城市的实时 ETA 准确率。
计算机视觉研究院
长按扫描维码
计算机视觉研究院
简要
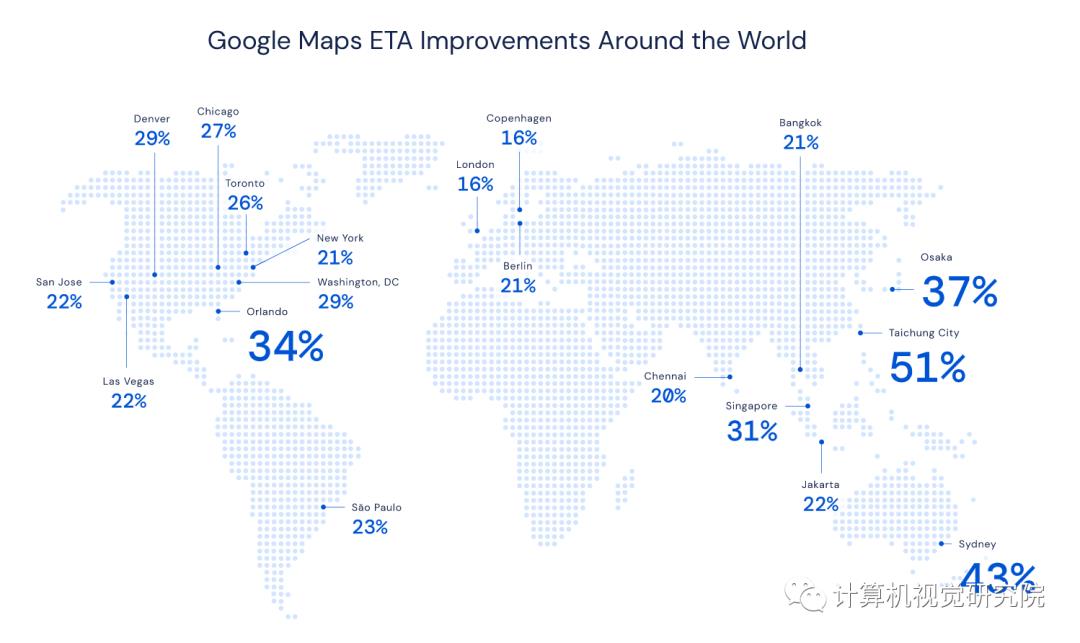
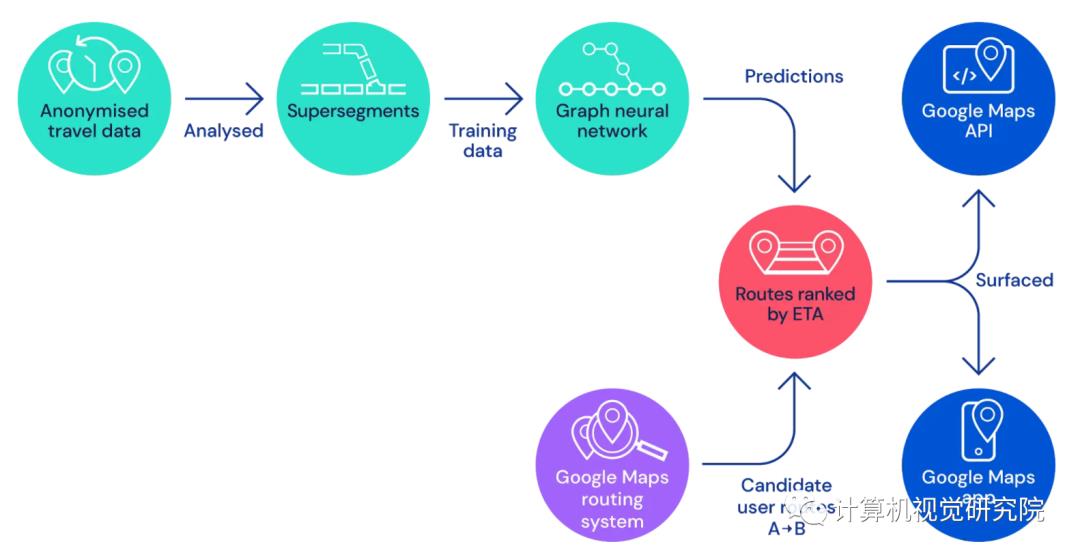
很多人使用谷歌地图(Google Maps)获取精确的交通预测和预估到达时间(Estimated Time of Arrival,ETA)。这是很重要的工具,尤其是当你将途经交通拥堵路段或者需要按时参加重要的会议。此外,对于拼车服务公司等企业而言,这些功能也很有用。它们使用 Google Maps 平台获取接送时间信息并基于乘车时间估计价格。DeepMind 研究者与 Google Maps 团队展开合作,尝试通过图神经网络等高级机器学习技术,提升柏林、雅加达、圣保罗、悉尼、东京和华盛顿哥伦比亚特区等地的实时 ETA 准确率,最高提升了 50%。下图为这些城市的 ETA 提升率:Google Maps 如何预测 ETA为了计算 ETA,Google Maps 分析了世界各地不同路段的实时交通数据。这些数据为 Google Maps 提供了目前交通状况的精确图景,但是它却无法帮助司机预计车程时间是 10 分钟、20 分钟,还是 50 分钟。所以,为了精确地预测未来交通状况,Google Maps 使用机器学习将全球道路的实时交通状况和历史交通模式结合起来。这一过程非常复杂,原因很多。例如,早晚高峰每天都会有,但每一天、每一月的高峰期确切时间有很大不同。道路质量、限速、交通事故等因素也增加了交通预测模型的复杂度。DeepMind 团队与 Google Maps 合作尝试提升 ETA 准确率。Google Maps 对超过 97% 的行程有着精确的 ETA 预测,DeepMind 与 Google Maps 的合作目的是将剩下那些预测不准确的情况最小化,例如台中(Taichung)的 ETA 预测准确率提升了 50% 多。为了在全球范围内实现这一目的,DeepMind 利用了一种通用机器学习架构——图神经网络(GNN),通过向模型添加关系学习偏置来进行时空推理,进而建模现实世界道路网络的连通性。具体步骤如下:将世界上的道路分割为超级路段(Supersegment)该团队将道路网络分割为包含多个邻近路段的「超级路段」,超级路段都具有极大的交通流量。目前,Google Maps 交通预测系统包括以下组件: