基于自适应RBF神经网络的超空泡航行体反演控制
Posted AAS自动化学报
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于自适应RBF神经网络的超空泡航行体反演控制相关的知识,希望对你有一定的参考价值。
常言道:“兵贵神速”, 航速是影响海战装备作战性能的重要指标. 超空泡航行体的出现, 大幅降低了水下环境的阻力限制, 使水下航行体达到前所未有的航速, 也因此吸引了众多研究者的关注.
李洋, 刘明雍, 张小件. 基于自适应RBF神经网络的超空泡航行体反演控制. 自动化学报, 2020, 46(4): 734-743
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170387
传统意义上, 根据航行速度的不同将超空泡航行体分为4 类, 对此4 类按空泡包裹的不同又可分为两类, 即“全包裹超空泡航行体” 和“非全包裹超空泡航行体”. 前者速度较高, 一般在70~1 000 m/s, 后者速度较低, 通常为0~70 m/s.
本文研究的是非全包裹超空泡航行体,针对超空泡航行体姿轨控制普遍存在的模型不确定性问题进行相关研究. 为此, 首先对其动力学特性进行分析, 并建立了超空泡航行体的动力学名义模型, 随后将其改写为不确定反馈系统, 然后利用反演控制方法设计超空泡航行体姿轨控制器, 针对模型中的未知函数利用径向基函数(Radial basis function, RBF) 神经网络进行逼近并补偿, 由基于Lyapunov 稳定理论设计的自适应方法计算神经网络的权重, 并给出稳定性证明. 仿真研究验证了控制器设计的有效性.
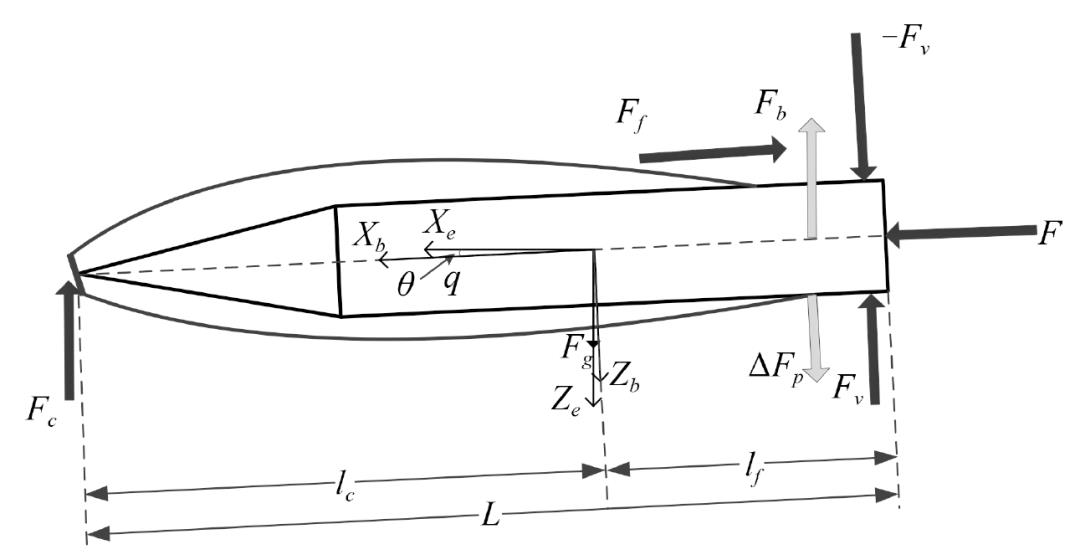
图1 航行体受力分析
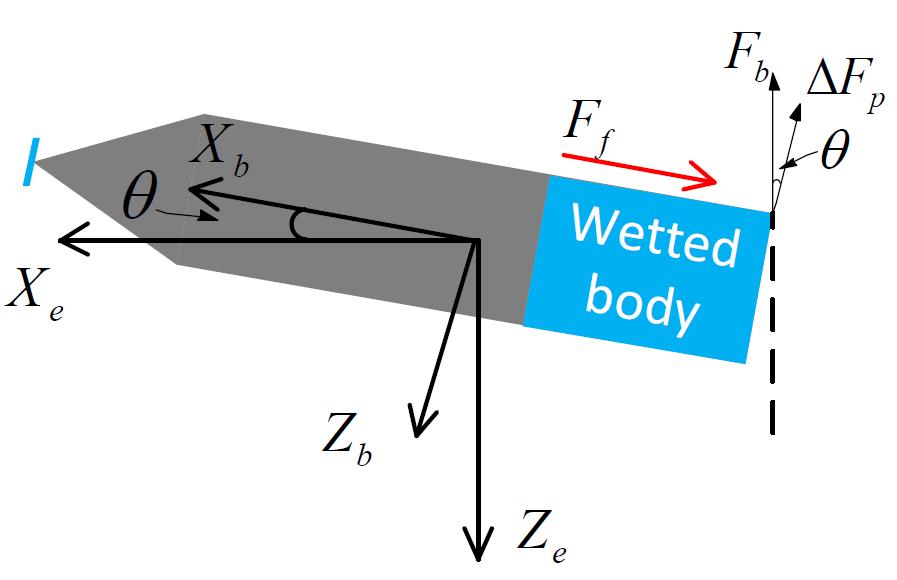
图2 非全包裹超空泡沾湿尾部受力
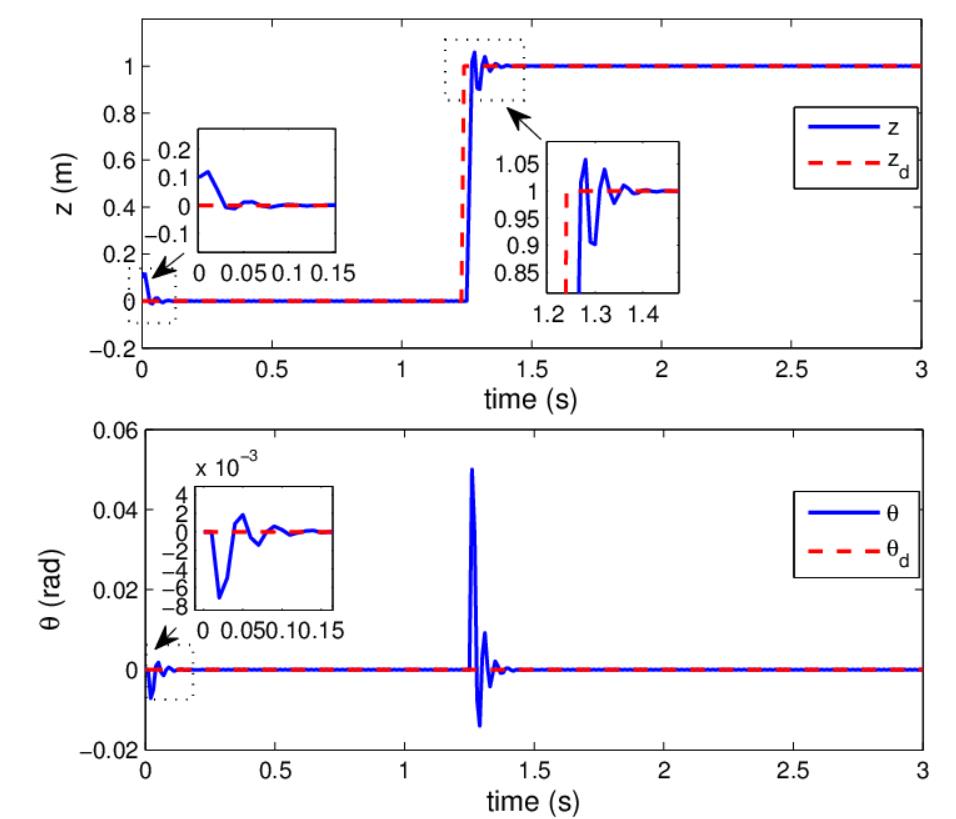
图3 深度 z 及俯仰角 θ 设定信号与实际跟踪响应
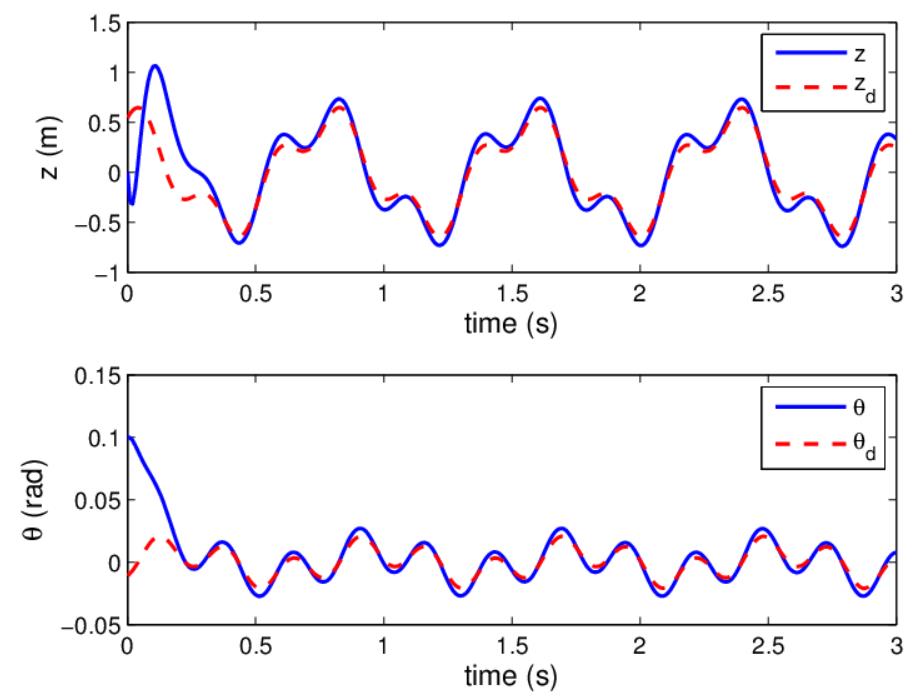
图4 深度z 及俯仰角θ 设定轨迹与实际跟踪响应
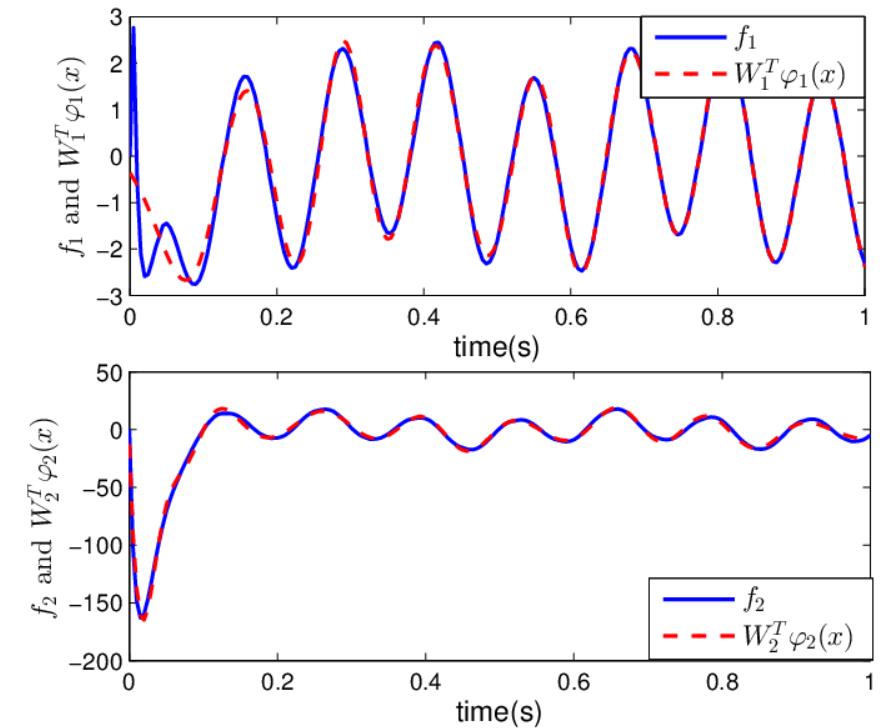
图5 f1, f2 与其估计值
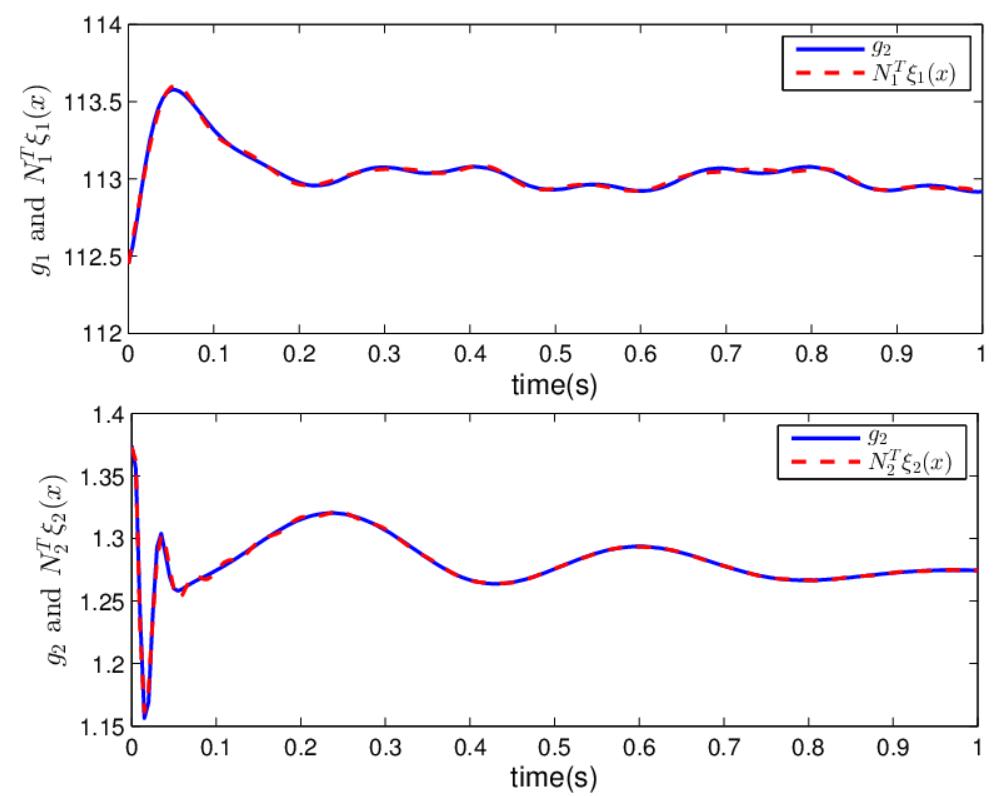
图6 g1, g2 与其估计值
本文针对超空泡航行体姿轨控制系统普遍存在的不确定性问题, 首先, 对非全包裹状态下的超空泡航行体进行动力学建模得到其名义模型; 然后, 设计了反演控制器, 并利用 RBF 神经网络逼近并补偿系统中的不确定项; 最后, 利用多个Lyapunov 函数的组合保证了系统稳定性. 文中保证的条件只是充分条件, 较为保守, 在以后的研究工作中可以考虑利用相关优化理论对参数的选择进行优化.
作者简介

李 洋
中国船舶集团海洋装备研究院研究员。2018年获得西北工业大学航海学院兵器科学与技术专业博士学位。主要研究方向为高速水下航行体姿轨控制,智能制造。

刘明雍
西北工业大学航海学院教授。主要研究方向为群集控制,地磁仿生导航,水下航行体导航,制导与控制。
张小件
周口师范学院物理与电信工程学院讲师。2018年获得西北工业大学航海学院兵器科学与技术专业博士学位。主要研究方向为水下航行器制导与控制、移动机器人路径规划。
期刊动态
热点文章
自动化学报
CJCR影响因子 2.793
《自动化学报》是由中国科学院自动化研究所、中国自动化学会主办的中文期刊,刊载自动化科学与技术领域的高水平科研成果,被EI, 英国科学文摘, 日本科学技术文献速报, 俄罗斯文摘杂志, CSCD等数据库收录,是中国科技核心期刊、中文核心期刊、中国科技期刊卓越行动计划入选期刊。
根据中国学术期刊影响因子年报,《自动化学报》最新影响因子为5.936;根据中国科技期刊引证报告,《自动化学报》的核心影响因子为2.793,核心影响因子、总被引频次、综合评价总分、核心权威因子四项主要指标全部排名第1。
《自动化学报》多年来多次获得 “百强报刊”, “精品科技期刊”、“百种杰出学术期刊”、“中国最具国际影响力学术期刊”等荣誉称号。


JAS《自动化学报》(英文版)

《自动化学报》服务号
《自动化学报》订阅号
联系我们
Tel: 010-82544653(日常咨询和稿件处理)
010-82544677(录用后稿件处理)
Fax: 010-82544497
aas_editor@ia.ac.cn(录用后稿件处理)
http://www.aas.net.cn
点
这里“阅读原文”,查看更多
以上是关于基于自适应RBF神经网络的超空泡航行体反演控制的主要内容,如果未能解决你的问题,请参考以下文章