穆莉莉,等.BP神经网络在SLAM特征匹配中的应用
Posted 测绘学术资讯
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了穆莉莉,等.BP神经网络在SLAM特征匹配中的应用相关的知识,希望对你有一定的参考价值。

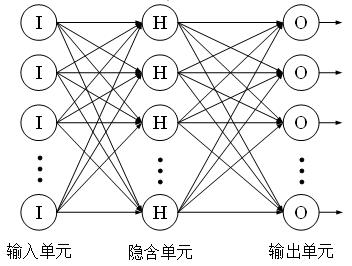
 为输入层与隐含层之间的连接权值矩阵;
为输入层与隐含层之间的连接权值矩阵;
 为隐含层第
为隐含层第
 个神经元的阈值。此时得到的结果为浮点数,为了提高压缩效率,将其量化为
5~8
比特的整数,最后保存变量数据。
个神经元的阈值。此时得到的结果为浮点数,为了提高压缩效率,将其量化为
5~8
比特的整数,最后保存变量数据。


|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
以上是关于穆莉莉,等.BP神经网络在SLAM特征匹配中的应用的主要内容,如果未能解决你的问题,请参考以下文章