OpenCV轮廓层次分析实现欧拉数计算
Posted OpenCV学堂
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV轮廓层次分析实现欧拉数计算相关的知识,希望对你有一定的参考价值。
欧拉数定义
二值图像分析中欧拉数重要的拓扑特征之一,在图像分析与几何对象识别中有着十分重要的作用,二值图像的欧拉数计算公式表示如下:
E = N – H 其中
E表示计算得到欧拉数
N表示联通组件的数目
H表示在联通组件内部的洞的数目
下图是二值图像,白色背景,两个对象、分析计算得到欧拉数的例子:
可以看到通过简单的欧拉数属性就可以对它们进行区分。左侧对象中有两个联通区域,所以N=2,没有洞孔区域,所以H=0, 计算得到欧拉数目为 2 – 0 = 。右侧是大写字母B,它只有一个联通区域所以N = 1, 内部有两个洞孔区域所以H = 2,最终计算得到欧拉数为 2 – 1 = -1。对于任意一个几何形状来说,如果我们要求得它的欧拉数,就首先要分析它的轮廓结构,然后根据轮廓层次结构计算得到N与H值。
欧拉数是图像几何识别中重要的属性,举例如下图中三个英文字母
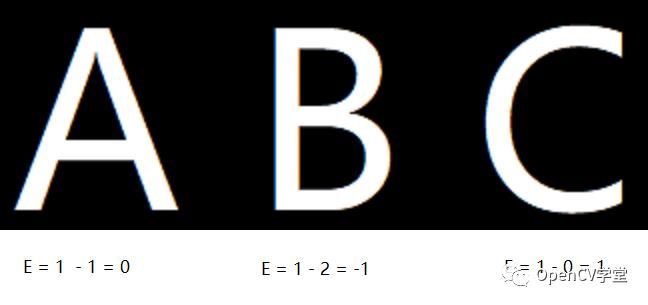 对字母A来说它的内部有一个黑色孔洞,所以它的H=1,其本身是一个联通组件所以N =1,最终计算得到欧拉数为 E = 1 -1 = 0,同样可以计算B与C它们的欧拉数分布为-1与1,可见通过欧拉数属性可以轻而易举的区分ABC三个英文字母。
对字母A来说它的内部有一个黑色孔洞,所以它的H=1,其本身是一个联通组件所以N =1,最终计算得到欧拉数为 E = 1 -1 = 0,同样可以计算B与C它们的欧拉数分布为-1与1,可见通过欧拉数属性可以轻而易举的区分ABC三个英文字母。
二:轮廓层次信息获取
在OpenCV对二值图像进行轮廓分析输出的层次结构会保存在一个Vec4i的结构体中,这里有必要首先看一下轮廓发现API及其相关参数的解释:
void cv::findContours(
InputOutputArray image,
OutputArrayOfArrays contours,
OutputArray hierarchy,
int mode,
int method,
Point offset = Point()
)
image参数表示输入的二值图像
contours表示所有的轮廓信息,每个轮廓是一系列的点集合
hierarchy表示对应的每个轮廓的层次信息,我们就是要用它实现对最大轮廓欧拉数的分析
mode表示寻找轮廓拓扑的方法,如果要寻找完整的层次信息,要选择参数RETR_TREE
method表示轮廓的编码方式,一般选择简单链式编码,参数CHAIN_APPROX_SIMPLE
offset表示是否有位移,一般默认是0
上面的参数中最重要的是hierarchy信息,它的输出是vector<Vec4i>

上面的索引如果是负数就表示没有相关层次信息,如果是非负数就表示有相关的层次关系信息。此外轮廓发现函数对输入image图像的要求必须满足
背景是黑色 ,0表示
对象或者前景是白色,1表示
三:欧拉数计算方法
有了轮廓的层次信息与每个轮廓的信息之后,尝试遍历每个轮廓,首先通过调用findContours就可以获取二值图像的轮廓层次信息,然后遍历每个轮廓,进行层次遍历,获得每层子轮廓的总数,最终根据轮廓层级不同分为孔洞与连接轮廓的计数,二者想减得到每个独立外层轮廓的欧拉数。
二值化与轮廓发现的代码如下:
Mat gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
vector<Vec4i> hireachy;
vector<vector<Point>> contours;
findContours(binary, contours, hireachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point());
获取同层轮廓的代码如下:
vector<int> current_layer_holes(vector<Vec4i> layers, int index) {
int next = layers[index][0];
vector<int> indexes;
indexes.push_back(index);
while (next >= 0) {
indexes.push_back(next);
next = layers[next][0];
}
return indexes;
}
使用队列迭代寻找遍历每层的代码如下:
while (!nodes.empty()) {
// 当前层总数目
if (index % 2 == 0) { // 联通组件对象
n_total += nodes.size();
}
else { // 孔洞对象
h_total += nodes.size();
}
index++;
// 计算下一层所有孩子节点
int curr_ndoes = nodes.size();
for (int n = 0; n < curr_ndoes; n++) {
int value = nodes.front();
nodes.pop();
// 获取下一层节点第一个孩子
int child = hireachy[value][2];
if (child >= 0) {
nodes.push(child);
}
}
}
四:运行与测试结果
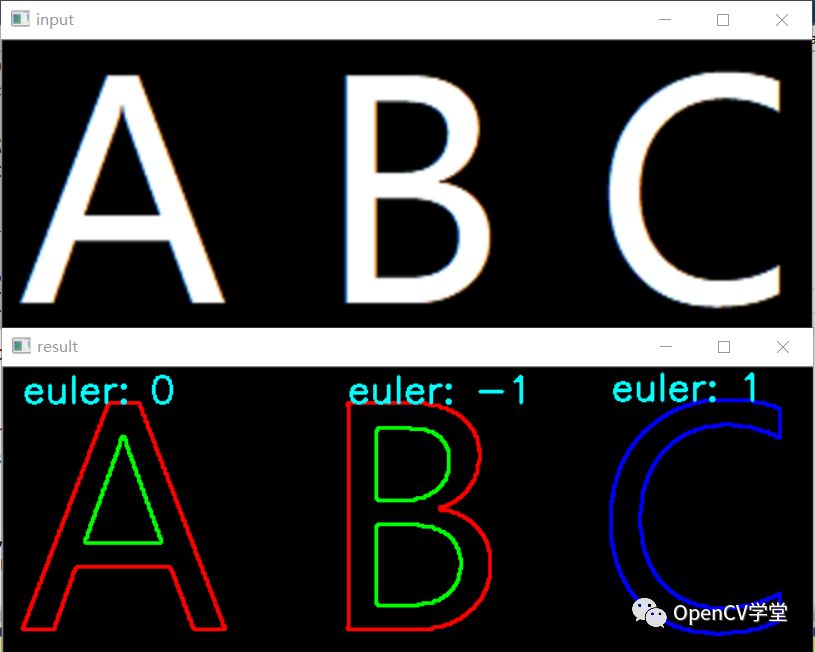
测试图一(ABC)与运行结果:
测试图二与运行结果
五:完整源代码
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
vector<int> current_layer_holes(vector<Vec4i> layers, int index);
int main(int argc, char** argv) {
Mat src = imread("D:/holes.png");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
Mat gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
vector<Vec4i> hireachy;
vector<vector<Point>> contours;
findContours(binary, contours, hireachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point());
Mat result = Mat::zeros(src.size(), src.type());
for (size_t t = 0; t < contours.size(); t++) {
int next = hireachy[t][0]; // next at the same hierarchical level
int prev = hireachy[t][1]; // prev at the same hierarchical level
int child = hireachy[t][2]; // first child
int parent = hireachy[t][3]; // parent
printf("next %d, previous %d, children : %d, parent : %d\n", next, prev, child, parent);
drawContours(result, contours, t, Scalar(0, 255, 0), 2, 8);
// start calculate euler number
int h_total = 0;
int n_total = 1;
int index = 1;
vector<int> all_children;
if (child >= 0 && parent < 0) {
// 计算当前层
queue<int> nodes;
vector<int> indexes = current_layer_holes(hireachy, child);
for (int i = 0; i < indexes.size(); i++) {
nodes.push(indexes[i]);
}
while (!nodes.empty()) {
// 当前层总数目
if (index % 2 == 0) { // 联通组件对象
n_total += nodes.size();
}
else { // 孔洞对象
h_total += nodes.size();
}
index++;
// 计算下一层所有孩子节点
int curr_ndoes = nodes.size();
for (int n = 0; n < curr_ndoes; n++) {
int value = nodes.front();
nodes.pop();
// 获取下一层节点第一个孩子
int child = hireachy[value][2];
if (child >= 0) {
nodes.push(child);
}
}
}
printf("hole number : %d\n", h_total);
printf("connection number : %d\n", n_total);
// 计算欧拉数
int euler_num = n_total - h_total;
printf("number of euler : %d \n", euler_num);
drawContours(result, contours, t, Scalar(0, 0, 255), 2, 8);
// 显示欧拉数
Rect rect = boundingRect(contours[t]);
putText(result, format("euler: %d", euler_num), rect.tl(), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(255, 255, 0), 2, 8);
}
if (child < 0 && parent < 0) {
printf("hole number : %d\n", h_total);
printf("connection number : %d\n", n_total);
int euler_num = n_total - h_total;
printf("number of euler : %d \n", euler_num);
drawContours(result, contours, t, Scalar(255, 0, 0), 2, 8);
Rect rect = boundingRect(contours[t]);
putText(result, format("euler: %d", euler_num), rect.tl(), FONT_HERSHEY_SIMPLEX, 1.0, Scalar(255, 255, 0), 2, 8);
}
}
imshow("result", result);
waitKey(0);
return 0;
}
vector<int> current_layer_holes(vector<Vec4i> layers, int index) {
int next = layers[index][0];
vector<int> indexes;
indexes.push_back(index);
while (next >= 0) {
indexes.push_back(next);
next = layers[next][0];
}
return indexes;
}
PS:代码未经更多严格测试,仅供参考!
【推荐阅读】
学易而好难 行易而力难 耻易而知难
关注【OpenCV学堂】
长按或者扫码二维码即可关注
以上是关于OpenCV轮廓层次分析实现欧拉数计算的主要内容,如果未能解决你的问题,请参考以下文章