通过socket控制机器人启停
Posted ABB机器人实战技巧
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了通过socket控制机器人启停相关的知识,希望对你有一定的参考价值。
转载请先后台留言,大家一起支持原创,推动机器人使用和发展
点击阅读原文,获取完整工作站及源代码
1. 需要机器人有pcinterface和multitask选项
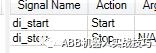
2. 创建虚拟信号


3. 将di_start和do_stop关联到系统输入
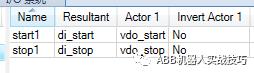
4. 创建crossconnection
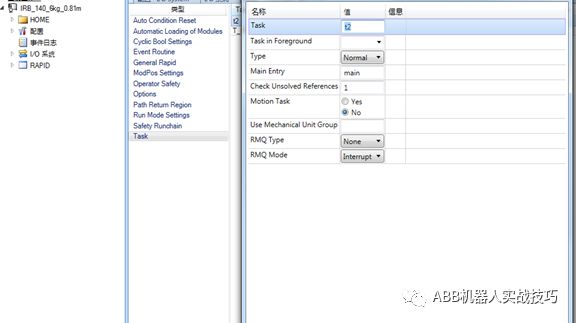
5. 新建任务t2,类型设为normal,以便能编程测试
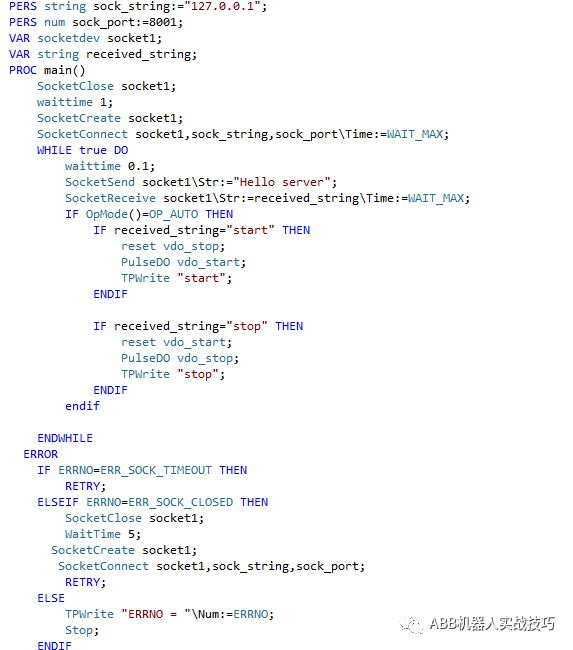
6. 在t2任务下新建模块,实质就是后台socket收发,当机器人处于自动模式,收到start字符串,发送一个vdo_start脉冲信号,vdo_start关联到di_start信号,di_start信号关联到系统输入start上。Stop功能类似。
7. 测试完毕,将t2任务设为semistatic,即开机直接启动
8. 重启后,打开socket测试小软件,如果机器人处于自动模式且上电,小软件发送start,机器人启动,发送stop,机器人停止。
********************************
点击阅读原文,获取完整工作站及源代码
更多内容
基于pcsdk传输文件到HOME及加载
searchL仿真工作站
pathoffset轨迹实时修正功能
撤销处理程序
★
★
★
★
更多大牛讲解视频,可以前往https://www.aiimooc.com 搜索ABB观看或者扫描以下二维码
以上是关于通过socket控制机器人启停的主要内容,如果未能解决你的问题,请参考以下文章
linux安装zookeeper集群保姆教程,包括集群启停脚本