嵌入式操作系统FreeRTOS 的原理与实现
Posted 硬件十万个为什么
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了嵌入式操作系统FreeRTOS 的原理与实现相关的知识,希望对你有一定的参考价值。
摘要:FreeRTOS是一个源码公开的免费的嵌入式实时操作系统,通过研究其内核可以更好地理解嵌入式操作系统的实现原理.本文主要阐述FreeRTOS系统中的任务调度机制、时间管理机制、任务管理机制以及内存分配策略的实现原理,并指出FreeRTOS在应用中的优缺点。
在嵌入式领域中,嵌入式实时操作系统正得到越来越广泛的应用。采用嵌入式实时操作系统(RTOS)可以更合理、更有效地利用CPU的资源,简化应用软件的设计,缩短系统开发时间,更好地保证系统的实时性和可靠性。由于RTOS需占用一定的系统资源(尤其是RAM资源),只有μC/OS-II、embOS、salvo、FreeRTOS等少数实时操作系统能在小RAM单片机上运行。相对于C/OS-II、embOS等商业操作系统,FreeRTOS操作系统是完全免费的操作系统,具有源码公开、可移植、可裁减、调度策略灵活的特点,可以方便地移植到各种单片机上运行。
实时操作系统与非实时操作系统的区别
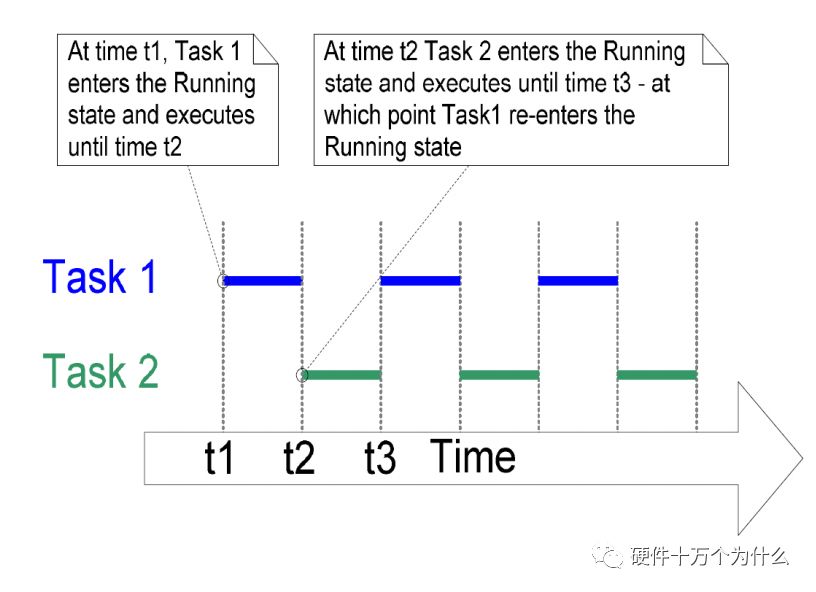
他们之间的区别,详见下图:
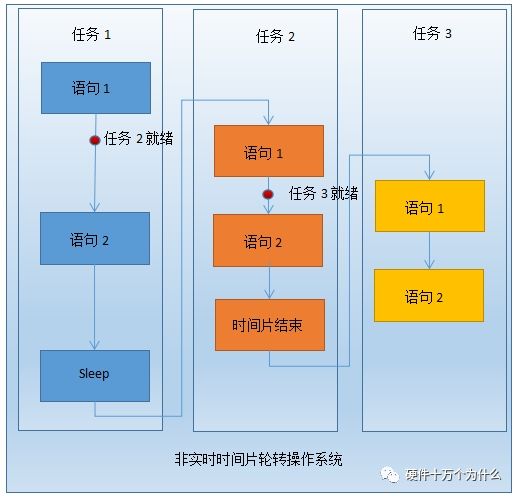
在上面的图中右边的任务优先级高于左边的任务,先看实时操作系统的,当优先级更高的任务2就绪的时候,即便任务1正在运行中,也必须立刻交出CPU的使用权,就跟中断一样,先执行任务2,等任务2执行完或者主动挂起(sleep)让出CPU的时候,任务1才能接着运行。
uCOS就是这样的实时操作系统,它是可抢占性的内核。我曾跟很多同事争辩过uCOS高优先级任务就绪而低优先级任务正在执行没有sleep的时候,高优先级任务能否打断低优先级任务而立即得到执行,遗憾的是很多人仍然坚持必须要sleep才能切换任务,每次我都只能无奈的用实验来证明这个本来不应该争辩的东西。
再看看我们的Linux/Windows/OSX这些基于时间片轮转的操作系统遇到这种问题的时候会怎么样呢,毫无疑问它们都是非实时的操作系统,CPU是不可抢占的,从上图可以看到,即便高优先级的任务就绪了,也不能马上中断低优先级任务而得到执行,必须要等到低优先级任务主动挂起(sleep)或者时间片结束才能得到执行。所以我们在使用PC的时候经常会遇到应用程序无响应的问题。即硬件资源被其他任务占用,本任务得不到立即执行。
我们平常娱乐办公用的都是非实时的操作系统,那么什么时候该使用实时操作系统呢?试想一下,一个射出的导弹如果要执行一个调整姿态的任务,这个时候刚好有其他无关紧要的任务在执行,如果是非实时操作系统,那么可能会等一会儿然后弹个窗告诉你应用程序无响应(如果它有窗可弹的话),那完了等弹窗出来导弹都射到外太空去了!毫无疑问这种高优先级任务片刻都不能等的设备就必须上实时操作系统,如果你不想你的导弹射到外太空去的话。
1、FreeRTOS操作系统功能
作为一个轻量级的操作系统,FreeRTOS提供的功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能等,可基本满足较小系统的需要。FreeRTOS内核支持优先级调度算法,每个任务可根据重要程度的不同被赋予一定的优先级,CPU总是让处于就绪态的、优先级最高的任务先运行。FreeRT0S内核同时支持轮换调度算法,系统允许不同的任务使用相同的优先级,在没有更高优先级任务就绪的情况下,同一优先级的任务共享CPU的使用时间。
FreeRTOS的内核可根据用户需要设置为可剥夺型内核或不可剥夺型内核。当FreeRTOS被设置为可剥夺型内核时,处于就绪态的高优先级任务能剥夺低优先级任务的CPU使用权,这样可保证系统满足实时性的要求;当FreeRTOS被设置为不可剥夺型内核时,处于就绪态的高优先级任务只有等当前运行任务主动释放CPU的使用权后才能获得运行,这样可提高CPU的运行效率。
2、FreeRTOS操作系统的原理与实现
2.1任务调度机制的实现
任务调度机制是嵌入式实时操作系统的一个重要概念,也是其核心技术。对于可剥夺型内核,优先级高的任务一旦就绪就能剥夺优先级较低任务的CPU使用权,提高了系统的实时响应能力。
FreeRTOS 支持的调度方式
FreeRTOS 操作系统支持三种调度方式:抢占式调度,时间片调度和合作式调度。 实际应用主要是
抢占式调度和时间片调度,合作式调度用到的很少。
抢占式调度
每个任务都有不同的优先级,任务会一直运行直到被高优先级任务抢占或者遇到阻塞式的 API 函数,
比如 vTaskDelay。
时间片调度
每个任务都有相同的优先级,任务会运行固定的时间片个数或者遇到阻塞式的 API 函数,比如
vTaskDelay,才会执行同优先级任务之间的任务切换。
什么是调度器
简单的说,调度器就是使用相关的调度算法来决定当前需要执行的任务。所有的调度器有一个共同的
特性:
调度器可以区分就绪态任务和挂起任务(由于延迟,信号量等待,邮箱等待,事件组等待等原因而使
得任务被挂起)。
调度器可以选择就绪态中的一个任务,然后激活它(通过执行这个任务)。 当前正在执行的任务是运
行态的任务。
不同调度器之间最大的区别就是如何分配就绪态任务间的完成时间。
嵌入式实时操作系统的核心就是调度器和任务切换,调度器的核心就是调度算法。任务切换的实现在
不同的嵌入式实时操作系统中区别不大,基本相同的硬件内核架构,任务切换也是相似的。调度算法就有
些区别了。下面我们主要了解一下抢占式调度器和时间片调度器。
抢占式调度器基本概念
在实际的应用中,不同的任务需要不同的响应时间。例如,我们在一个应用中需要使用电机,键盘和
LCD 显示。电机比键盘和 LCD 需要更快速的响应,如果我们使用合作式调度器或者时间片调度,那么电
机将无法得到及时的响应,这时抢占式调度是必须的。
如果使用了抢占式调度,最高优先级的任务一旦就绪,总能得到 CPU 的控制权。 比如,当一个运行
着的任务被其它高优先级的任务抢占,当前任务的 CPU 使用权就被剥夺了,或者说被挂起了,那个高优
先级的任务立刻得到了 CPU 的控制权并运行。 又比如,如果中断服务程序使一个高优先级的任务进入就
绪态,中断完成时,被中断的低优先级任务被挂起,优先级高的那个任务开始运行。
使用抢占式调度器,使得最高优先级的任务什么时候可以得到 CPU 的控制权并运行是可知的,同时
使得任务级响应时间得以最优化。
总的来说,学习抢占式调度要掌握的最关键一点是:每个任务都被分配了不同的优先级,抢占式调度
器会获得就绪列表中优先级最高的任务,并运行这个任务。
FreeRTOS 抢占式调度器的实现
如果用户在 FreeRTOS 的配置文件 FreeRTOSConfig.h 中禁止使用时间片调度, 那么每个任务必须配
置不同的优先级。当 FreeRTOS 多任务启动执行后,基本会按照如下的方式去执行:
首先执行的最高优先级的任务 Task1, Task1 会一直运行直到遇到系统阻塞式的 API 函数,比如延迟,
事件标志等待,信号量等待,Task1 任务会被挂起,也就是释放 CPU 的执行权,让低优先级的任务
得到执行。
FreeRTOS 操作系统继续执行任务就绪列表中下一个最高优先级的任务 Task2,Task2 执行过程中有
两种情况:
Task1由于延迟时间到, 接收到信号量消息等方面的原因, 使得 Task1从挂起状态恢复到就绪态,
在抢占式调度器的作用下,Task2 的执行会被 Task1 抢占。
Task2 会一直运行直到遇到系统阻塞式的 API 函数,比如延迟,事件标志等待,信号量等待, Task2
任务会被挂起,继而执行就绪列表中下一个最高优先级的任务。
如果用户创建了多个任务并且采用抢占式调度器的话,基本都是按照上面两条来执行。 根据抢占式调
度器,当前的任务要么被高优先级任务抢占,要么通过调用阻塞式 API 来释放 CPU 使用权让低优先
级任务执行,没有用户任务执行时就执行空闲任务。 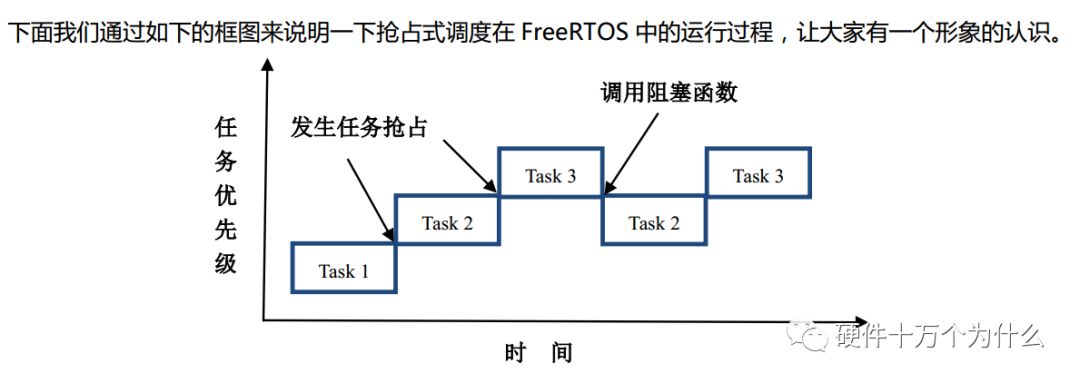
运行条件:
这里仅对抢占式调度进行说明。
创建 3 个任务 Task1,Task2 和 Task3。
Task1 的优先级为 1,Task2 的优先级为 2,Task3 的优先级为 3。 FreeRTOS 操作系统是设置的数值
越小任务优先级越低,故 Task3 的优先级最高,Task1 的优先级最低。
此框图是 FreeRTOS 操作系统运行过程中的一部分。
运行过程描述如下:
此时任务 Task1 在运行中,运行过程中由于 Task2 就绪,在抢占式调度器的作用下任务 Task2 抢占
Task1 的执行。 Task2 进入到运行态,Task1 由运行态进入到就绪态。
任务 Task2 在运行中,运行过程中由于 Task3 就绪,在抢占式调度器的作用下任务 Task3 抢占 Task2
的执行。 Task3 进入到运行态,Task2 由运行态进入到就绪态。
任务 Task3 运行过程中调用了阻塞式 API 函数,比如 vTaskDelay,任务 Task3 被挂起,在抢占式调
度器的作用下查找到下一个要执行的最高优先级任务是 Task2,任务 Task2 由就绪态进入到运行态。
任务 Task2 在运行中,运行过程中由于 Task3 再次就绪,在抢占式调度器的作用下任务 Task3 抢占
Task2 的执行。 Task3 进入到运行态,Task2 由运行态进入到就绪态。
上面就是一个简单的不同优先级任务通过抢占式调度进行任务调度和任务切换的过程。
时间片调度器基本概念
在小型的嵌入式 RTOS 中,最常用的的时间片调度算法就是 Round-robin 调度算法。这种调度算法
可以用于抢占式或者合作式的多任务中。另外,时间片调度适合用于不要求任务实时响应的情况。
实现 Round-robin 调度算法需要给同优先级的任务分配一个专门的列表,用于记录当前就绪的任务,
并为每个任务分配一个时间片(也就是需要运行的时间长度,时间片用完了就进行任务切换)。
FreeRTOS 时间片调度器的实现
在 FreeRTOS 操作系统中只有同优先级任务才会使用时间片调度,另外还需要用户在
FreeRTOSConfig.h 文件中使能宏定义:
#define configUSE_TIME_SLICING 1
默认情况下,此宏定义已经在 FreeRTOS.h 文件里面使能了,用户可以不用在 FreeRTOSConfig.h 文
件中再单独使能。
下面我们通过如下的框图来说明一下时间片调度在 FreeRTOS 中的运行过程,让大家有一个形象的认识。 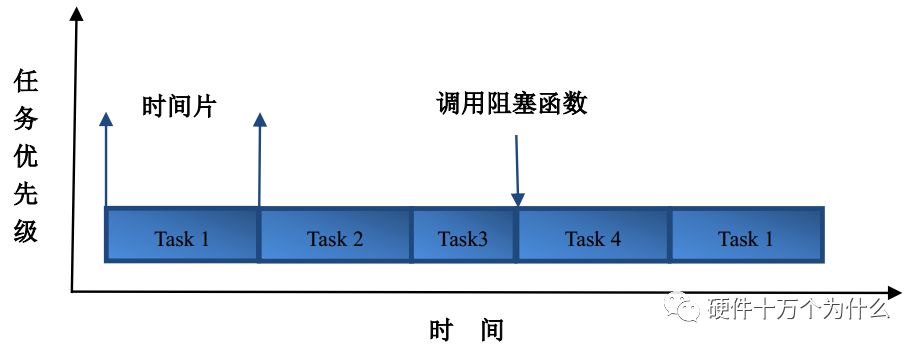
运行条件:
这里仅对时间片调度进行说明。
创建 4 个同优先级任务 Task1,Task2,Task3 和 Task4。
每个任务分配的时间片大小是 5 个系统时钟节拍。
运行过程描述如下:
先运行任务 Task1,运行够 5 个系统时钟节拍后,通过时间片调度切换到任务 Task2。
任务 Task2 运行够 5 个系统时钟节拍后,通过时间片调度切换到任务 Task3。
任务 Task3 在运行期间调用了阻塞式 API 函数,调用函数时,虽然 5 个系统时钟节拍的时间片大小
还没有用完,此时依然会通过时间片调度切换到下一个任务 Task4。 (注意,没有用完的时间片不会
再使用,下次任务 Task3 得到执行还是按照 5 个系统时钟节拍运行)
任务 Task4 运行够 5 个系统时钟节拍后,通过时间片调度切换到任务 Task1。
上面就是一个简单的同优先级任务通过时间片调度进行任务调度和任务切换的过程。
总结:
时间片调度和抢占式调度我们一般都是开启了的,这样优先级相同时,使用时间片调度,优先级不同时,使用抢占式调度。默认情况下,在freertos.h中使能了时间片调度:
而抢占式调度需要我们用户自己开启,一般在freertosconfig.h中使能:

不同于μC/OS-II,FreeRTOS对系统任务的数量没有限制,既支持优先级调度算法也支持轮换调度算法,因此FreeRTOS采用双向链表而不是采用查任务就绪表的方法来进行任务调度。系统定义的链表和链表节点数据结构如下所示:
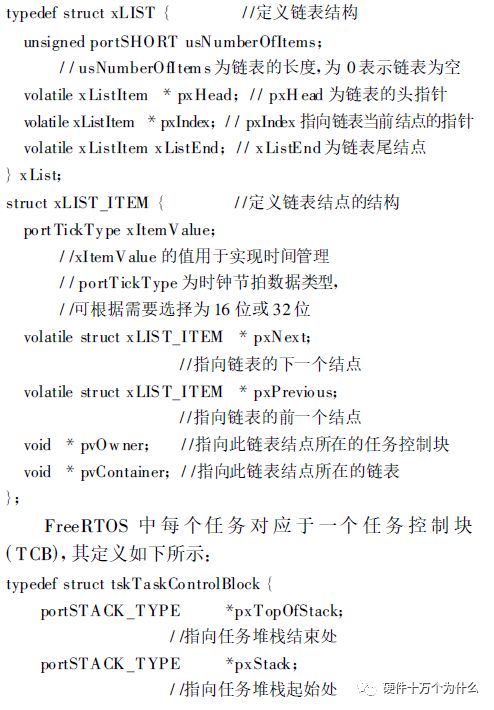
FreeRTOS定义就绪任务链表数组为xList pxReady—TasksLists[portMAX_PRIORITIES]。其中portMAX_PRIORITIES为系统定义的最大优先级。若想使优先级为n的任务进入就绪态,需要把此任务对应的TCB中的结点xGenericListltem插入到链表pxReadyTasksLiStS[n]中,还要把xGenericListItem中的pvContainer指向pxReadyTasksLists[n]方可实现。
当进行任务调度时,调度算法首先实现优先级调度。系统按照优先级从高到低的顺序从就绪任务链表数组中寻找usNumberOfItems第一个不为0的优先级,此优先级即为当前最高就绪优先级,据此实现优先级调度。若此优先级下只有一个就绪任务,则此就绪任务进入运行态;若此优先级下有多个就绪任务,则需采用轮换调度算法实现多任务轮流执行。
若在优先级n下执行轮换调度算法,系统先通过执行(pxReadyTasksLists[n])→pxIndex=( pxReadyTasks-Lists[n ]) → pxlndex→pxNext语句得到当前结点所指向的下一个结点,再通过此结点的pvOwner指针得到对应的任务控制块,最后使此任务控制块对应的任务进入运行态。由此可见,在FreeRTOS中,相同优先级任务之间的切换时间为一个时钟节拍周期。
以图1为例,设系统的最大任务数为pottMAX_PRIORITIES,在某一时刻进行任务调度时,得到pxReadyTasksLists[i].usNumberOfItems=O(i=2...portMAX_PRIORITIES)以及pxReadyTasksLists[1]。usNumberOfItems=3。由此内核可知当前最高就绪优先级为l,且此优先级下已有三个任务已进入就绪态.由于最高就绪优先级下有多个就绪任务,系统需执行轮换调度算法实现任务切换;通过指针pxlndex可知任务l为当前任务,而任务l的pxNext结点指向任务2,因此系统把pxIndex指向任务2并执行任务2来实现任务调度。当下一个时钟节拍到来时,若最高就绪优先级仍为1,由图可见,系统会把pxIndex指向任务3并执行任务3。
图1 任务调度示意
为了加快任务调度的速度,FrecRTOS通过变量ucTopReadyPriotity跟踪当前就绪的最高优先级。当把一个任务加入就绪链表时,如果此任务的优先级高于ucTopReadyPriority,则把这个任务的优先级赋予ucTopReadyPriority。这样当进行优先级调度时,调度算法不是从portMAX_PRIORITIES而是从ucTopReady-Priority开始搜索。这就加快了搜索的速度,同时缩短了内核关断时间。
为了加快任务调度的速度,FrecRTOS通过变量ucTopReadyPriotity跟踪当前就绪的最高优先级。当把一个任务加入就绪链表时,如果此任务的优先级高于ucTopReadyPriority,则把这个任务的优先级赋予ucTopReadyPriority。这样当进行优先级调度时,调度算法不是从portMAX_PRIORITIES而是从ucTopReady-Priority开始搜索。这就加快了搜索的速度,同时缩短了内核关断时间。
2.3 时间管理的实现
FreeRTOS提供的典型时间管理函数是vTaskDelay(),调用此函数可以实现将任务延时一段特定时间的功能。在FreeRT0S中,若一个任务要延时xTicksToDelay个时钟节拍,系统内核会把当前系统已运行的时钟节拍总数(定义为xTickCount,32位长度)加上xTicksToDelay得到任务下次唤醒时的时钟节拍数xTimeToWake。然后,内核把此任务的任务控制块从就绪链表中删除,把xTimeToWake作为结点值赋予任务的xItemValue,再根据xTimeToWake的值把任务控制块按照顺序插入不同的链表。若xTimeToWake > xTickCount,即计算中没有出现溢出,内核把任务控制块插入到pxDelayedTaskList链表;若xTimeToWak e< xTickCount,即在计算过程中出现溢出,内核把任务控制块插入到pxOverflowDelayed-Taskust链表。
每发生一个时钟节拍,内核就会把当前的xTick-Count加1。若xTickCount的结果为0,即发生溢出,内核会把pxOverflowDelayedTaskList作为当前链表;否则,内核把pxDelaycdTaskList作为当前链表。内核依次比较xTickCotlrtt和链表各个结点的xTimcToWake。若xTick-Count等于或大于xTimeToWake,说明延时时间已到,应该把任务从等待链表中删除,加入就绪链表。
由此可见,不同于μC/OS—II,FreeRTOS采用“加”的方式实现时间管理。其优点是时间节拍函数的执行时间与任务数量基本无关,而μC/OS—II的OSTimcTick()的执行时间正比于应用程序中建立的任务数。因此当任务较多时,FreeRTOS采用的时间管理方式能有效加快时钟节拍中断程序的执行速度。
2.4 内存分配策略
每当任务、队列和信号量创建的时候,FreeRTOS要求分配一定的RAM。虽然采用malloc()和free()函数可以实现申请和释放内存的功能,但这两个函数存在以下缺点:并不是在所有的嵌入式系统中都可用,要占用不定的程序空间,可重人性欠缺以及执行时间具有不可确定性。为此,除了可采用malloc()和free()函数外,FreeRTOS还提供了另外两种内存分配的策略,用户可以根据实际需要选择不同的内存分配策略。
第1种方法是,按照需求内存的大小简单地把一大块内存分割为若干小块,每个小块的大小对应于所需求内存的大小。这样做的好处是比较简单,执行时间可严格确定,适用于任务和队列全部创建完毕后再进行内核调度的系统;这样做的缺点是,由于内存不能有效释放,系统运行时应用程序并不能实现删除任务或队列。
第2种方法是,采用链表分配内存,可实现动态的创建、删除任务或队列。系统根据空闲内存块的大小按从小到大的顺序组织空闲内存链表。当应用程序申请一块内存时,系统根据申请内存的大小按顺序搜索空闲内存链表,找到满足申请内存要求的最小空闲内存块。为了提高内存的使用效率,在空闲内存块比申请内存大的情况下,系统会把此空闲内存块一分为二。一块用于满足申请内存的要求,一块作为新的空闲内存块插入到链表中。
2.3 时间管理的实现
FreeRTOS提供的典型时间管理函数是vTaskDelay(),调用此函数可以实现将任务延时一段特定时间的功能。在FreeRT0S中,若一个任务要延时xTicksToDelay个时钟节拍,系统内核会把当前系统已运行的时钟节拍总数(定义为xTickCount,32位长度)加上xTicksToDelay得到任务下次唤醒时的时钟节拍数xTimeToWake。然后,内核把此任务的任务控制块从就绪链表中删除,把xTimeToWake作为结点值赋予任务的xItemValue,再根据xTimeToWake的值把任务控制块按照顺序插入不同的链表。若xTimeToWake > xTickCount,即计算中没有出现溢出,内核把任务控制块插入到pxDelayedTaskList链表;若xTimeToWak e< xTickCount,即在计算过程中出现溢出,内核把任务控制块插入到pxOverflowDelayed-Taskust链表。
每发生一个时钟节拍,内核就会把当前的xTick-Count加1。若xTickCount的结果为0,即发生溢出,内核会把pxOverflowDelayedTaskList作为当前链表;否则,内核把pxDelaycdTaskList作为当前链表。内核依次比较xTickCotlrtt和链表各个结点的xTimcToWake。若xTick-Count等于或大于xTimeToWake,说明延时时间已到,应该把任务从等待链表中删除,加入就绪链表。
由此可见,不同于μC/OS—II,FreeRTOS采用“加”的方式实现时间管理。其优点是时间节拍函数的执行时间与任务数量基本无关,而μC/OS—II的OSTimcTick()的执行时间正比于应用程序中建立的任务数。因此当任务较多时,FreeRTOS采用的时间管理方式能有效加快时钟节拍中断程序的执行速度。
2.4 内存分配策略
每当任务、队列和信号量创建的时候,FreeRTOS要求分配一定的RAM。虽然采用malloc()和free()函数可以实现申请和释放内存的功能,但这两个函数存在以下缺点:并不是在所有的嵌入式系统中都可用,要占用不定的程序空间,可重人性欠缺以及执行时间具有不可确定性。为此,除了可采用malloc()和free()函数外,FreeRTOS还提供了另外两种内存分配的策略,用户可以根据实际需要选择不同的内存分配策略。
第1种方法是,按照需求内存的大小简单地把一大块内存分割为若干小块,每个小块的大小对应于所需求内存的大小。这样做的好处是比较简单,执行时间可严格确定,适用于任务和队列全部创建完毕后再进行内核调度的系统;这样做的缺点是,由于内存不能有效释放,系统运行时应用程序并不能实现删除任务或队列。
第2种方法是,采用链表分配内存,可实现动态的创建、删除任务或队列。系统根据空闲内存块的大小按从小到大的顺序组织空闲内存链表。当应用程序申请一块内存时,系统根据申请内存的大小按顺序搜索空闲内存链表,找到满足申请内存要求的最小空闲内存块。为了提高内存的使用效率,在空闲内存块比申请内存大的情况下,系统会把此空闲内存块一分为二。一块用于满足申请内存的要求,一块作为新的空闲内存块插入到链表中。
下面以图2为例介绍方法2的实现。假定用于动态分配的RAM共有8KB,系统首先初始化空闲内存块链表,把8KB RAM全部作为一个空闲内存块。当应用程序分别申请1KB和2KB内存后,空闲内存块的大小变为5KB3。2KB的内存使用完毕后,系统需要把2KB插入到现有的空闲内存块链表。由于2 KB<5KB,所以把这2 KB插入5KB的内存块之前。若应用程序又需要申请3 KB的内存,而在空闲内存块链表中能满足申请内存要求的最小空闲内存块为5KB,因此把5KB内存拆分为2部分,3KB部分用于满足申请内存的需要,2KB部分作为新的空闲内存块插入链表。随后1KB的内存使用完毕需要释放,系统会按顺序把1KB内存插入到空闲内存链表中。
图2 采用空闲内存块链表进行内存管理
方法2的优点是,能根据任务需要高效率地使用内存,尤其是当不同的任务需要不同大小的内存的时候。方法二的缺点是,不能把应用程序释放的内存和原有的空闲内存混合为一体,因此,若应用程序频繁申请与释放“随机”大小的内存,就可能造成大量的内存碎片。这就要求应用程序申请与释放内存的大小为“有限个”固定的值(如图2中申请与释放内存的大小固定为l KB、2 KB或3 KB)。方法2的另一个缺点是,程序执行时间具有一定的不确定性。
μC/OS—II提供的内存管理机制是把连续的大块内存按分区来管理,每个分区中包含整数个大小相同的内存块。由于每个分区的大小相同,即使频繁地申请和释放内存也不会产生内存碎片问题,但其缺点是内存的利用率相对不高。当申请和释放的内存大小均为一个固定值时(如均为2 KB),FreeRTOS的方法2内存分配策略就可以实现类似μC/OS—Ⅱ的内存管理效果。
2.5 FreeRTOS的移植
FreeRTOS操作系统可以被方便地移植到不同处理器上工作,现已提供了ARM、MSP430、AVR、PIC、C8051F等多款处理器的移植。FrceRTOS在不同处理器上的移植类似于μC/0S一II,故本文不再详述FreeRTOS的移植。此外,TCP/IP协议栈μIP已被移植到FreeRTOS上,具体代码可见FreeRTOS网站。
2.6 FreeRTOS的不足
相对于常见的μC/OS—II操作系统,FreeRTOS操作系统既有优点也存在不足。其不足之处,一方面体现在系统的服务功能上,如FreeRTOS只提供了消息队列和信号量的实现,无法以后进先出的顺序向消息队列发送消息;另一方面,FreeRTOS只是一个操作系统内核,需外扩第三方的GUI(图形用户界面)、TCP/IP协议栈、FS(文件系统)等才能实现一个较复杂的系统,不像μC/OS-II可以和μC/GUI、μC/FS、μC/TCP-IP等无缝结合。
3、结 论
作为一个源码公开的操作系统,学习FreeRTOS可以更好地掌握嵌入式实时操作系统的实现原理;作为一个免费的操作系统,采用FreeRTOS可在基本满足较小系统需要的情况下降低系统成本、简化开发难度。在实践中,采用FreeRTOS操作系统和MSP430单片机构成的温度控制系统稳定可靠,实现了较好的控制效果。相信随着时间的发展,FreeRTOS会不断完善其功能,以更好地满足人们对嵌入式操作系统实时性、可靠性、易用性的要求。
本文转载自《单片机及嵌入式应用》
以上是关于嵌入式操作系统FreeRTOS 的原理与实现的主要内容,如果未能解决你的问题,请参考以下文章