强化学习-动态规划精简版
Posted CCH陈常鸿
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了强化学习-动态规划精简版相关的知识,希望对你有一定的参考价值。
强化学习导论依然坚持在翻译,但工作量实在太大,先给出精简版。
动态规划(Dymamic Programming)以下简称DP。
DP要求一个完全已知的环境模型,MDP五元素全部知道。
你不记得什么是MDP五元素?MDP五元素为S,A,P,R,gama,分别对应状态(state),动作(action),状态转移概率(比如你到一个十字路口,你目前的状态(s)就是站在路口准备向下一个方向走,你有前后左右四个选择,假如你往左走的概率是20%,那么你从站立状态到往左走状态的状态转移概率为20%),奖励(reward),惩罚因子(gama)
DP是有模型学习(model-base learning)
强化学习是序列决策问题(就像过十字路口,要先走到路口才有下一步),DP也是序列决策问题,不同的是DP是环境已知,agent不需要靠与环境的交互来获取下一个状态(在十字路口中,到路口自然选择方向,没有与环境交互,比如红绿灯这些),而是知道自己执行某个动作后面的状态是什么,然后优化自己的策略。
动态规划是将一个复杂的问题一系列简单的问题,一旦解决这些简单的问题,再将子问题结合起来,解决复杂的问题,并且同时将它们的解保存起来。
D是指状态是step-by-step的(序列化问题,路口时一个一个走的)
P是指优化成子问题,通过贝曼方程MDP被递归的切成子问题,同时它有值函数,保存了每个子问题的解,因此它能通过动态规划来求解。针对MDP,切成的子问题就是在每个状态应该选择的action,MDP的子问题是一种递归的方式存在,在一时刻的子问题,取决于上一个问题选了哪个action(十字路口选了一个方向,那么下一个路口选择就与前一个路口的其他选择无关了)。
DP分两部分:一是预测(prediction),也就是已知MDP的状态,动作,奖励,状态转移率,惩罚因子和策略,求出每一个状态的值函数,也就是每一个状态下能获得reward是多少。二是控制,S,A都已知,在策略(policy)未知的情况下,计出最优的值函数,并且借此计算最优策略。
DP->policy iteration->policy评估->policy iteration ->policy评估...
Policy Iteration:
1)Policy evalution:基于当前的policy计算出每个状态的值函数。
2)Policy improvement:基于当前值函数,利用贪心算法找到当前最优的Policy。
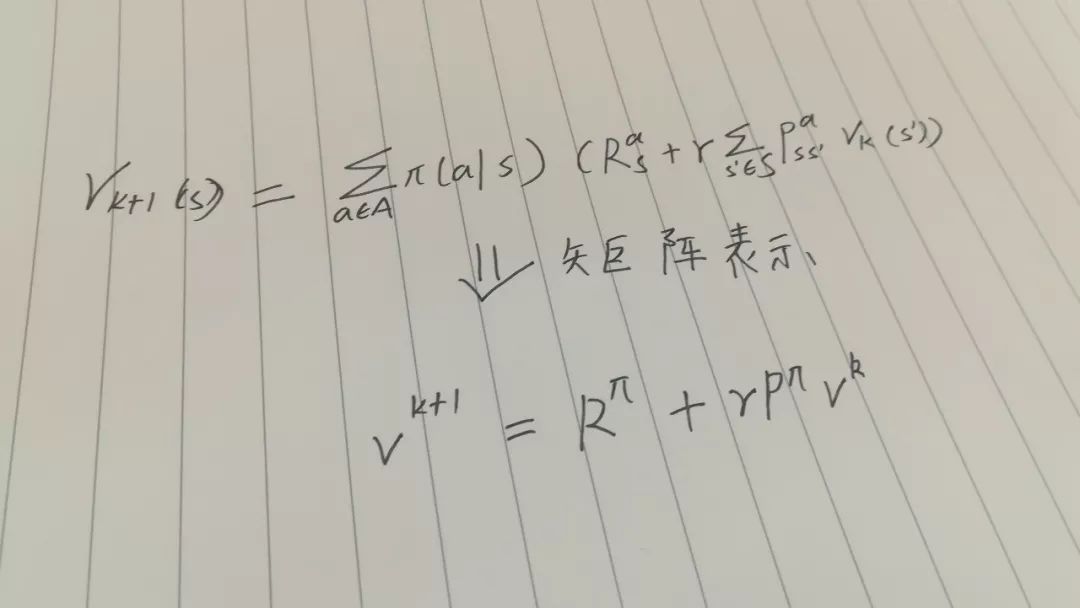
对于一次迭代,状态S的价值等于前一次迭代该状态的额即时奖励与所有S的下一个可能状态,S`的价值与其概率成绩之和。
矩阵形式:
例子:
状态空间:S1-S14为非终止状态,S0和S15为终止状态。
动作空间:A{上,下,左,右},只有非终止状态下才有动作。
R:S1-S14为-1,S0和S15为1.
惩罚系数gama为:1
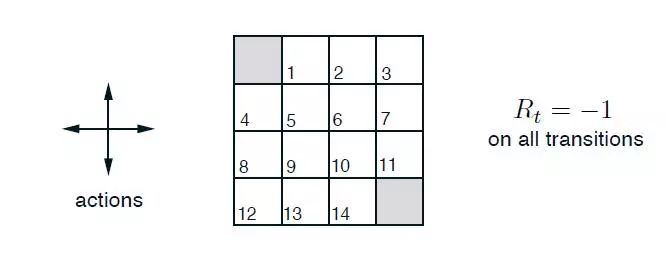
边界的数字若往外则以自身状态作为状态。
问题:评估在这个世界里给定的策略
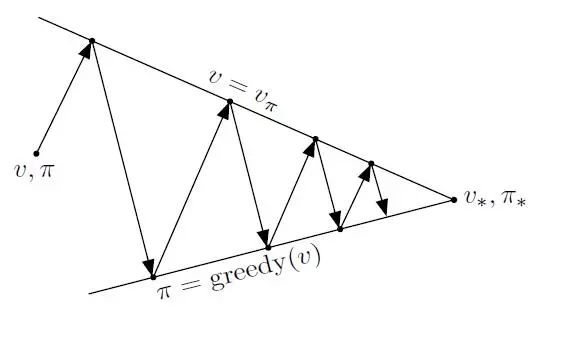
策略迭代(Policy Iteration):
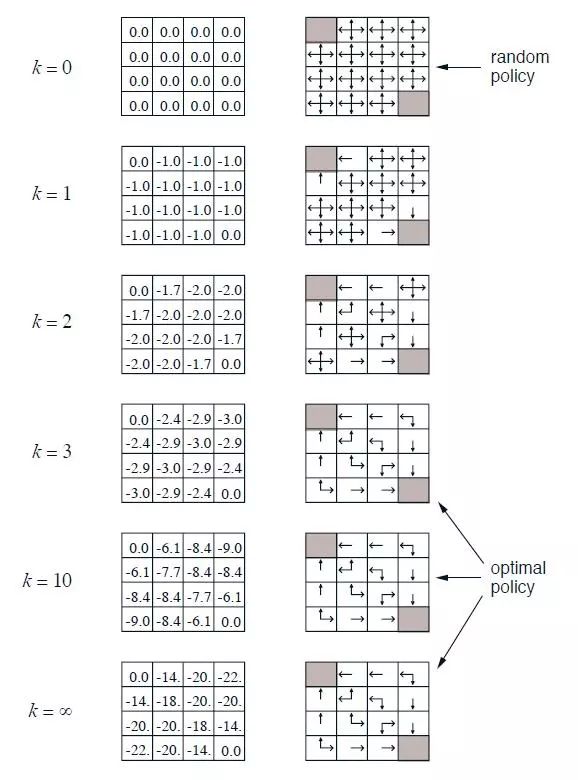
这是强化学习给出的过程图,但具体整么算不是很清楚,我自己写了具体计算过程(从右往左看)
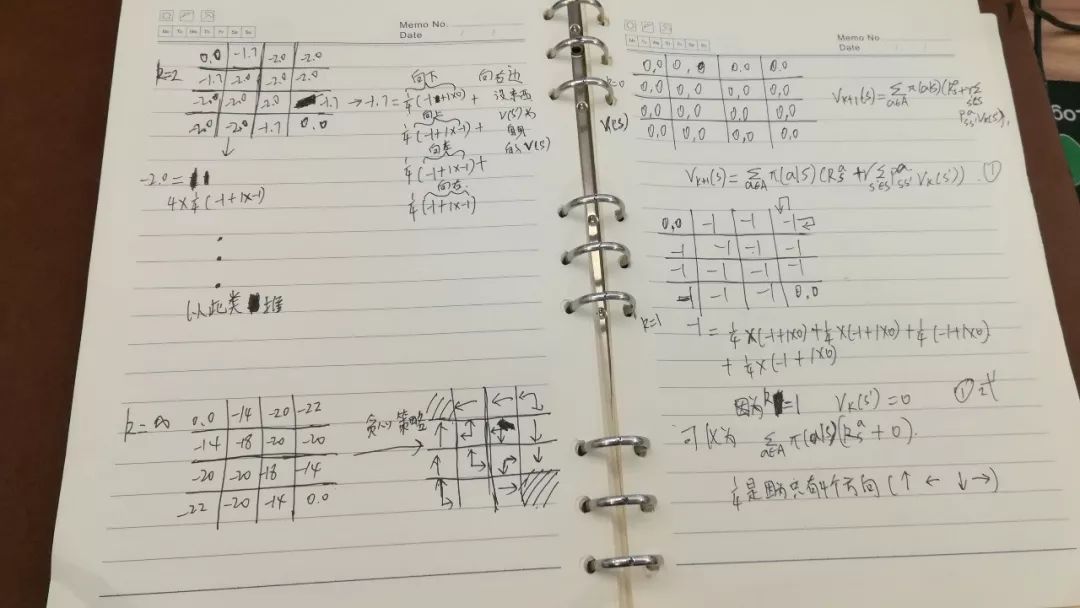
在迭代次数足够多的情况下,可以得到一个近似的全部状态的值函数表。
上面是一个基本的策略评估过程,没有进行策略改进。
如果长时间的迭代后,策略收敛并不明显,先状态值函数估计一段时间,然后看策略如何,根据各个状态的值函数,给出一个相对比初始随机要好一点的策略,然后根据这个策略再次进行值函数评估,反复如此,这就是策略迭代。
策略迭代就是当前策略迭代出V值,再根据V值贪婪地更新策略,反复,最终得到最优策略π*和最优策略状态价值函数V*.
一般策略更新收敛速度会比状态价值函数值得收敛快很多。
价值迭代(Value Iteration)
优化原则:一个最优策略可以被分解为两部分,一部分从状态S到下一个S`采取了最优行为A*,另一部分就是在状态S`时遵循一个最优策略。
定理:一个策略能够使得状态S获得最优值,当且仅当,对于从状态S可以到达任何状态S`,该策略能够使状态S`的价值是最优价值。
确定性价值迭代,在前一个定理的基础上,如果知道goal的状态的位置以及反推需要明确的状态间关系,这就是一个确定性的价值迭代。
此时,我们可以把问题分解成一系列的的子问题,最终目标开始分析,逐渐往回推。
价值迭代,从初始状态价值开始迭代计算,最终收敛,整个过程没有遵循任何策略。与策略迭代不同,在价值迭代过程中,算法不会给出明确的策略,迭代过程得到价值函数不会对应任何策略。价值迭代虽然不需要策略参与,也要知道,状态间的转换率,也就是知道模型。
动态规划的两个问题:预测和控制。预测问题就是给定策略去计算各状态的价值函数。
控制问题就是通过策略迭代,先给定或随机策略下计算状态价值函数,根据状态函数贪婪更新策略。单纯的价值迭代也可以,但要知道S在a后到达所有后续状态及概率。
以上是关于强化学习-动态规划精简版的主要内容,如果未能解决你的问题,请参考以下文章