无人车动态规划(Dynamic Programming)入门
Posted 半杯茶的小酒杯
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了无人车动态规划(Dynamic Programming)入门相关的知识,希望对你有一定的参考价值。
1、什么是动态规划(Dynamic Programming)
CS专业出身的人大抵没有人不知道动态规划(Dynamic Programming)的,该算法的本质就是把复杂的大问题分解成相互重叠的简单子问题,将子问题的最优解层层组合起来,就得到了复杂大问题的最优解。
能用动态规划解决的问题必须满足两个条件:一是最优子结构。即问题的最优解所包含的子问题的解也是最优的;二是子问题相互重叠。即是当使用递归进行自顶向下的求解时,每次产生的子问题不总是新的问题,而是已经被重复计算过的问题。
最典型的经常被拿来讲解Dynamic Programming的例子就是斐波那契数列(Fibonacci sequence),它的数学定义如下:
可以看到斐波那契数列(Fibonacci sequence)带有明显的子问题拆分的特征,通过将F(n)的求解拆分为F(n-1)和F(n-2)两个子问题,重复的子问题只需要计算一次。
斐波那契数列(Fibonacci sequence)计算的Python实现如下:
def fib(n):
f = [0] * (n + 1)
f[0] = 0
f[1] = 1
for i in range(2, n + 1):
f[i] = f[i - 1] + f[i - 2]
return f[n]
2、动态规划算法在无人车中的应用
在如下的自动驾驶场景中,无人车在位置A处进行右转,目标是达到位置G处。理想的驾驶路径是:
(位置A处右转)->(进入车道C)->(变道进入车道B)->(左转到达目标位置G)
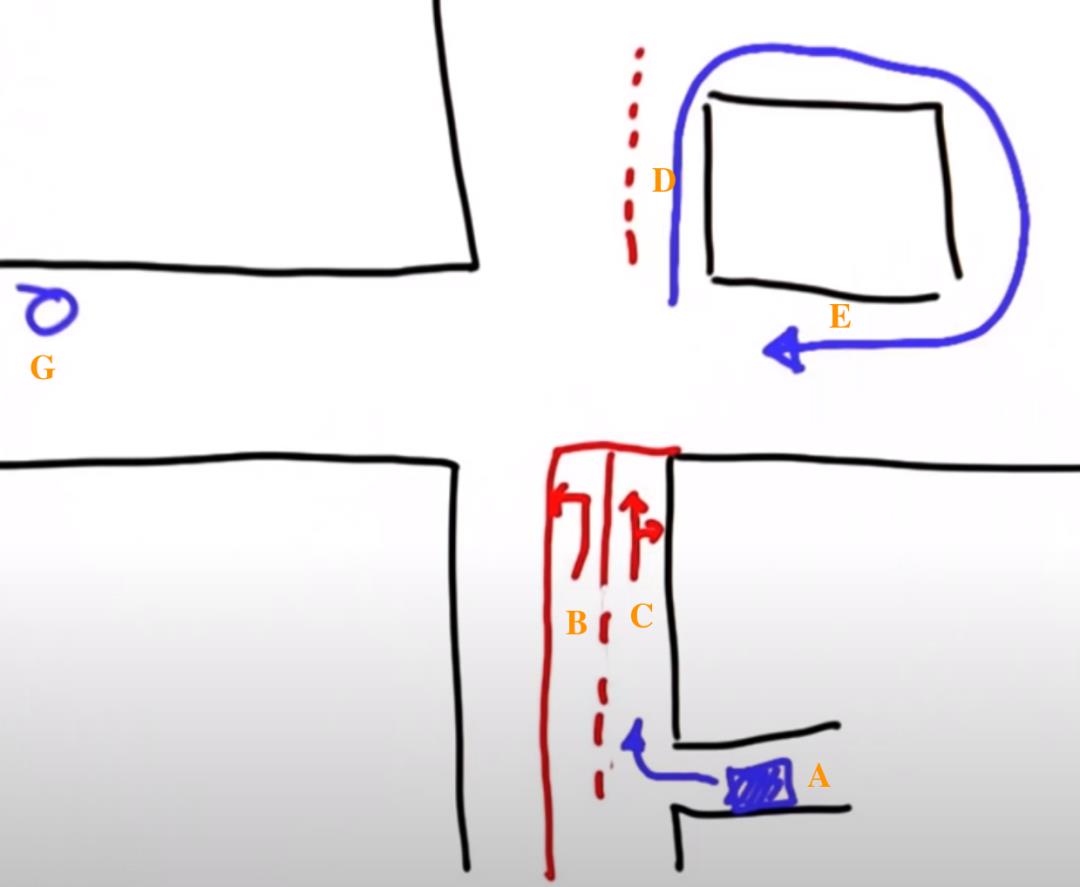
但是由于环境是随机的,我们的无人车在实际上路时,可能遇到各种情况。比如当我们计划从车道C变道进入车道B时,发现左侧被一辆大卡车挡住了;如果停下来等大卡车驶过之后再变道,会被车道C上无人车后方的司机拼命用大喇叭催你,无奈之下,我们只好放弃左转,继续直行,再寻求其它路径达到目的地。
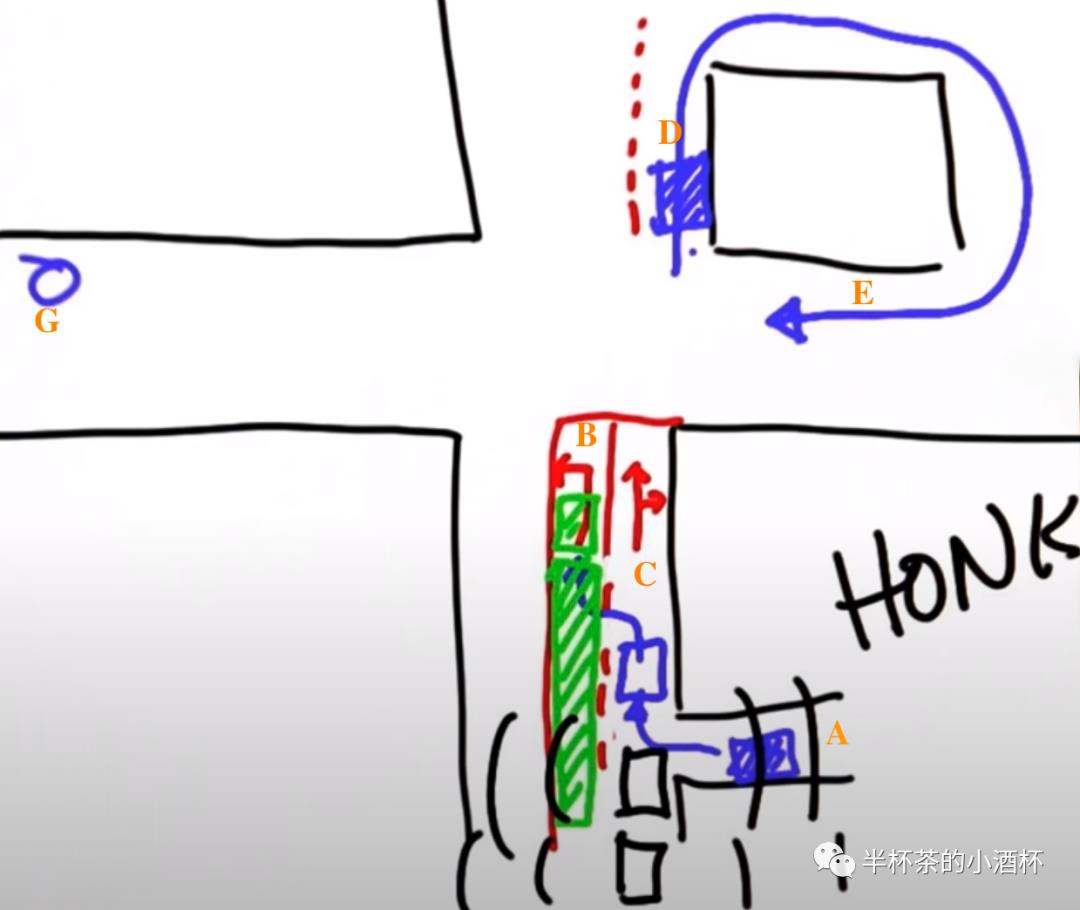
所以最后的行驶路径可能就变成了:
(位置A处右转)->(进入车道C,直行)->(通过路口,进入车道D)->(连续右转,达到位置E)->(直行到达目标位置G)
这里可以看到,我们需要一种方法,使得在无人车放弃车道C到车道B的变道时继续前进时,能够快速找到下一条可通行路径。动态规划(Dynamic Programming)可以用来解决这类问题,它可以给出从任意一个位置出发到达目的地的最优路径。
2.1、更加简化的问题
为了应用动态规划(Dynamic Programming)算法,我们首先看下简化版的问题。如下图所示,我们将道路区域按照空间进行网格划分,带阴影线的网格表示不可通行区域,G表示目标位置。我们的目标是求解从任意一点到目标位置的路径规划策略。
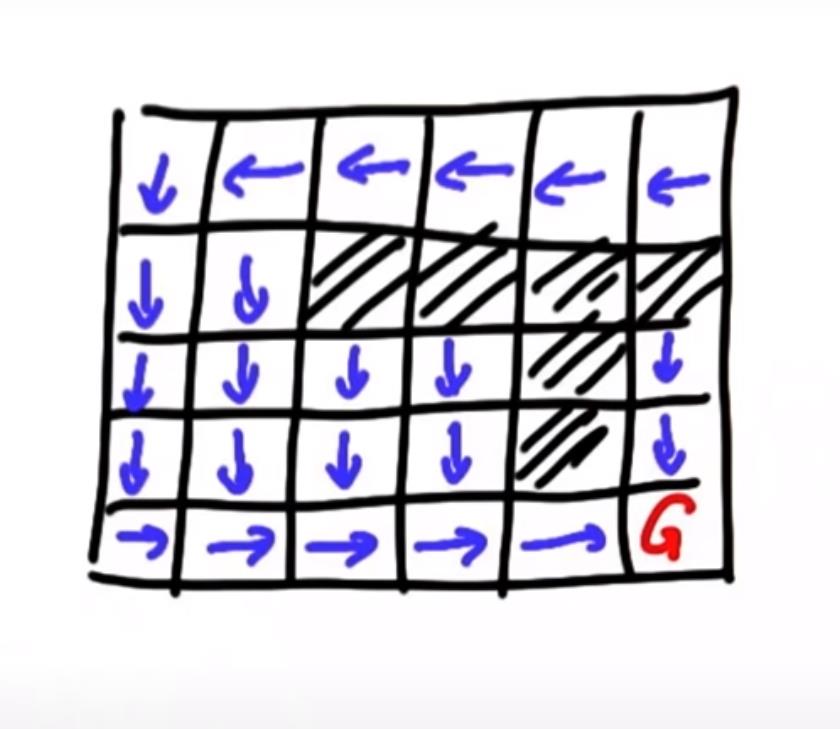
图中的蓝色箭头表示车辆在该位置的规划策略,也是我们要求解的目标,可以认为我们的目标就是通过Policy函数,将位置(x,y)映射到车辆的运动Action上。我们假设车辆只有四个运动Action:向上、向下、向左、向右,我们可以将目标函数写为:
如何将(x,y)转化为具体的Action呢?为了计算Action,我们可以计算每个Cell到达目标姿态的最小Cost,一般情况下,cost的大小与该Cell距离目标姿态的路径长度有关系;有了每个Cell的Cost之后,Action的方向就是从Cost值大的Cell指向Cost值小的网格。
2.2 网格Value(Cost)的计算
每个Cell的Value的Value Function定义如下:
+ Cost
的取值为: , , , ,即它的左、上、右、下四个方向的Cell;cost为Cell之间的Cost,这里取Cost为步长1。
可以看到,这是一个典型的动态规划的问题。我们看下如何使用动态规划(Dynamic Programming)算法求解每个Cell的Value。
# Map Represention
grid = [[0, 1, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0],
[0, 0, 0, 0, 1, 0]]
goal = [len(grid)-1, len(grid[0])-1]
# the cost associated with moving from a cell to an adjacent one
cost = 1
delta = [[-1, 0 ], # go up
[ 0, -1], # go left
[ 1, 0 ], # go down
[ 0, 1 ]] # go right
def compute_value(grid,goal,cost):
# If a cell is a wall or it is impossible to reach the goal from a cell,assign that cell a value of 99.
value = [[99 for row in range(len(grid[0]))] for col in range(len(grid))]
change = True
while change:
change = False
for x in range(len(grid)):
for y in range(len(grid[0])):
if goal[0] == x and goal[1] == y:
if value[x][y] > 0:
value[x][y] = 0
change = True
elif grid[x][y] == 0:
for a in range(len(delta)):
x2 = x + delta[a][0]
y2 = y + delta[a][1]
print((x2, y2))
if x2 >= 0 and x2 < len(grid) and y2 >= 0 and y2 < len(grid[0]) and grid[x2][y2] == 0:
v2 = value[x2][y2] + cost
if v2 < value[x][y]:
change = True
value[x][y] = v2
return value
最后我们可以得到每个Cell的Value值如下,它的每个值代表了从该位置到达目标姿态的最小Cost,99表示该位置不可达。
[[11, 99, 7, 6, 5, 4],
[10, 99, 6, 5, 4, 3],
[9, 99, 5, 4, 3, 2],
[8, 99, 4, 3, 2, 1],
[7, 6, 5, 4, 99, 0]]
将Value值映射为Policy,就得到从(x,y)到Policy的映射表:
[['v', ' ', 'v', 'v', 'v', 'v'],
['v', ' ', 'v', 'v', 'v', 'v'],
['v', ' ', 'v', 'v', 'v', 'v'],
['v', ' ', '>', '>', '>', 'v'],
['>', '>', '^', '^', ' ', '*']]
2.3 应用到车辆运动中
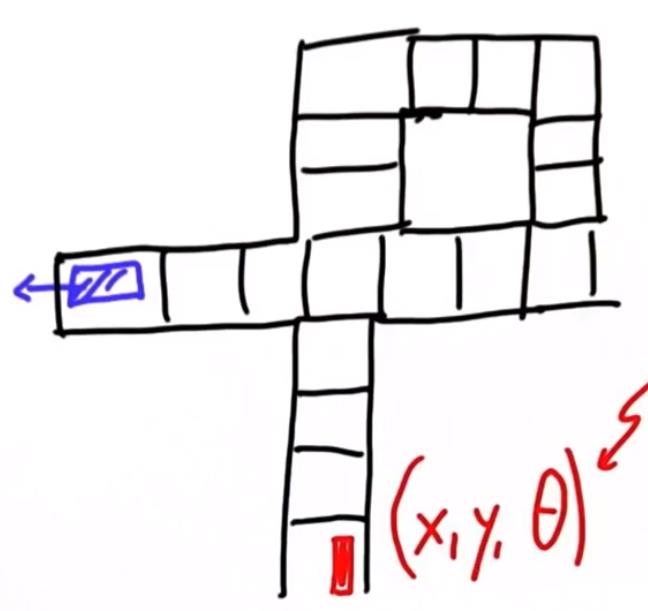
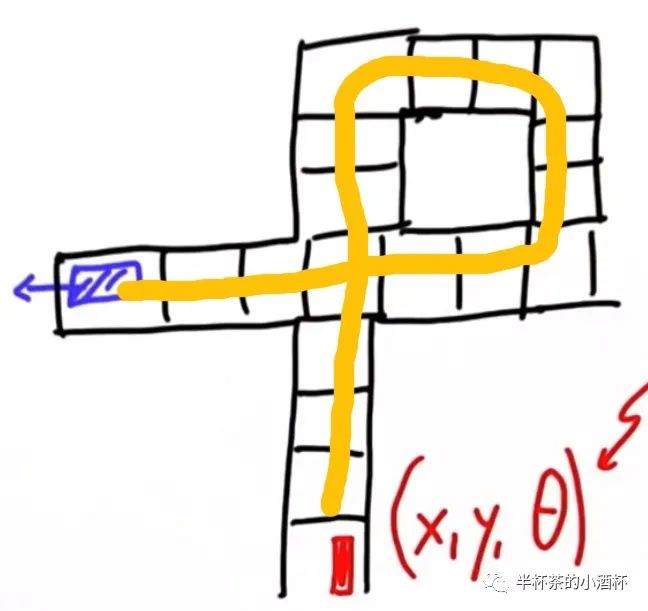
用稍微不那么简化的方式来展示Dynamic Programming的应用。如下图所示,红色是车辆的当前位置,蓝色是车辆的目标姿态。假设车辆的运动方向 只有四个选择{Up, Down, Left, Right}, 车辆的运动只有三个选择: 左转、直行、右转。
我们首先构建地图信息:
# 0 = navigable space
# 1 = unnavigable space
grid = [[1, 1, 1, 0, 0, 0],
[1, 1, 1, 0, 1, 0],
[0, 0, 0, 0, 0, 0],
[1, 1, 1, 0, 1, 1],
[1, 1, 1, 0, 1, 1]]
给定车辆的起始位置、结束位置和车辆的运动约束:
init = [4, 3, 0] # given in the form [row,col,direction]
# direction = 0: up
# 1: left
# 2: down
# 3: right
goal = [2, 0] # given in the form [row,col]
forward = [[-1, 0], # go up
[ 0, -1], # go left
[ 1, 0], # go down
[ 0, 1]] # go right
forward_name = ['up', 'left', 'down', 'right']
# action has 3 values: right turn, no turn, left turn
action = [-1, 0, 1]
action_name = ['R', '#', 'L']
cost = [2, 1, 20] # cost has 3 values, corresponding to making a right turn, no turn, and a left turn
基于Dynamic Programming计算从起点到终点的车辆运动路径。计算的过程如前所述,先计算Policy,在从Policy中搜索从起点到目标位置的可行驶路径。
def optimum_policy2D(grid,init,goal,cost):
value = [[[999 for row in range(len(grid[0]))] for col in range(len(grid))],
[[999 for row in range(len(grid[0]))] for col in range(len(grid))],
[[999 for row in range(len(grid[0]))] for col in range(len(grid))],
[[999 for row in range(len(grid[0]))] for col in range(len(grid))]]
policy = [[[' ' for row in range(len(grid[0]))] for col in range(len(grid))],
[[' ' for row in range(len(grid[0]))] for col in range(len(grid))],
[[' ' for row in range(len(grid[0]))] for col in range(len(grid))],
[[' ' for row in range(len(grid[0]))] for col in range(len(grid))]]
policy2D = [[' ' for row in range(len(grid[0]))] for col in range(len(grid))]
change = True
while change:
change = False
for x in range(len(grid)):
for y in range(len(grid[0])):
for orientation in range(4):
if goal[0] == x and goal[1] == y:
if value[orientation][x][y] > 0:
value[orientation][x][y] = 0
policy[orientation][x][y] = '*'
change = True
elif grid[x][y] == 0:
for i in range(3):
o2 = (orientation + action[i]) % 4
x2 = x + forward[o2][0]
y2 = y + forward[o2][1]
if x2 >= 0 and x2 < len(grid) and y2 >= 0 and y2 < len(grid[0]) and grid[x2][y2] == 0:
v2 = value[o2][x2][y2] + cost[i]
if v2 < value[orientation][x][y]:
value[orientation][x][y] = v2
policy[orientation][x][y] = action_name[i]
change = True
x = init[0]
y = init[1]
orientation = init[2]
policy2D[x][y] = policy[orientation][x][y]
while policy[orientation][x][y] != '*':
if policy[orientation][x][y] == '#':
o2 = orientation
elif policy[orientation][x][y] == 'R':
o2 = (orientation - 1) % 4
elif policy[orientation][x][y] == 'L':
o2 = (orientation + 1) % 4
x = x + forward[o2][0]
y = y + forward[o2][1]
orientation = o2
policy2D[x][y] = policy[orientation][x][y]
return policy2D
最终输出的路径结果如下:
[[' ', ' ', ' ', 'R', '#', 'R'],
[' ', ' ', ' ', '#', ' ', '#'],
['*', '#', '#', '#', '#', 'R'],
[' ', ' ', ' ', '#', ' ', ' '],
[' ', ' ', ' ', '#', ' ', ' ']]
在上面的实现中,我们将左转的Cost设置为20,比较高的左转代价使得车辆更倾向于直行和右转,所以规划路径的效果如下:
我们将将左转的Cost降低到2,看看会发生什么效果?
[[' ', ' ', ' ', ' ', ' ', ' '],
[' ', ' ', ' ', ' ', ' ', ' '],
['*', '#', '#', 'L', ' ', ' '],
[' ', ' ', ' ', '#', ' ', ' '],
[' ', ' ', ' ', '#', ' ', ' ']]
可以看到,车辆路径规划在路口位置选择了左转,规划效果如下:
参考资料
本文内容源自Udacity的免费课程:Dynamic Programming - Artificial Intelligence for Robotics
Youtube链接: https://www.youtube.com/watch?v=r2bPY2s9wII&t=12s
推荐阅读
点击左下角【阅读原文】加入我的知识星球!后台回复“优惠券”可以领取优惠券哦!
以上是关于无人车动态规划(Dynamic Programming)入门的主要内容,如果未能解决你的问题,请参考以下文章