411,动态规划和递归求不同路径 II
Posted 数据结构和算法
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了411,动态规划和递归求不同路径 II相关的知识,希望对你有一定的参考价值。
If you're not satisfied with the life you're living, don't just complain. Do something about it.
对于现况的不满,你不能只是抱怨,而是要有勇气作出改变。
问题描述
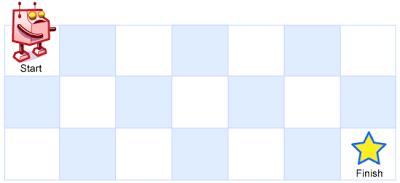
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
说明:m 和 n 的值均不超过 100。
示例 1:
输入:
[
[0,0,0],
[0,1,0],
[0,0,0]
]
输出: 2
解释:
3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右
动态规划解决
上一篇我们讲过和这非常类似的一道题,只不过上一篇没有障碍物,但并不影响我们解这道题,我们还用dp[i][j]表示到坐标(i,j)这个格内有多少条不同的路径,所以最终的答案就是求dp[m-1][n-1]。
这里的递推分为两种情况,一种是当前网格没有障碍物,一种是当前网格有障碍物。
1,如果当前网格dp[i][j]有障碍物,那么这里肯定是走不过去的,所以dp[i][j]=0。
2,如果当前网格dp[i][j]没有障碍物,那么递推公式就和上一题一样了。
因为只能从上面或左边走过来,所以递推公式是
dp[i][j]=dp[i-1][j]+dp[i][j-1]。
dp[i-1][j]表示的是从上面走过来的路径条数。
dp[i][j-1]表示的是从左边走过来的路径条数。
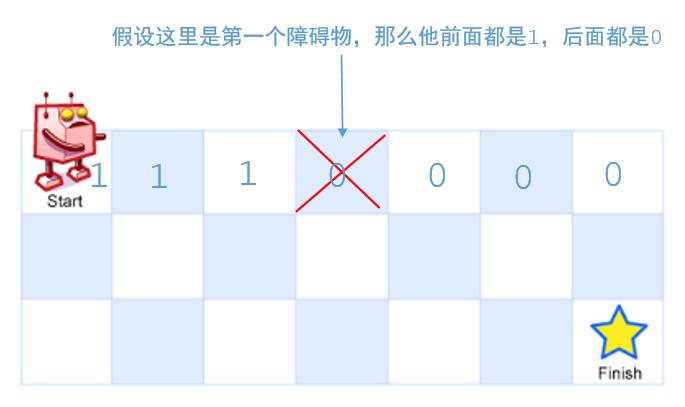
边界条件也好判断,如果当前行没有障碍物,那么当前行的值都是1,如果有障碍物,那么第一个障碍物前面都是1,其他的都是0。同理第一列也一样。
我们来看下代码
1public int uniquePathsWithObstacles(int[][] obstacleGrid) {
2 int m = obstacleGrid.length;
3 int n = obstacleGrid[0].length;
4 int dp[][] = new int[m][n];
5 //第一列初始化
6 for (int i = 0; i < m; i++) {
7 if (obstacleGrid[i][0] == 0)
8 dp[i][0] = 1;
9 else
10 break;
11 }
12 //第一行初始化
13 for (int i = 0; i < n; i++) {
14 if (obstacleGrid[0][i] == 0)
15 dp[0][i] = 1;
16 else
17 break;
18 }
19 for (int i = 1; i < m; ++i)
20 for (int j = 1; j < n; ++j)
21 if (obstacleGrid[i][j] == 0)
22 dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
23 return dp[m - 1][n - 1];
24}
代码和差不多,只不过在第一行和第一列还有上面第21行多了一些判断。
动态规划代码量优化
上面代码虽然也能实现,但有那么多条件判断总感觉很繁琐,所以我们还有一种方式就是把二维数组的长和宽都放大一格,这样数组的第一行和第一列都不存储任何值,但初始条件要变了
dp[1][1] = obstacleGrid[0][0] ^ 1;
dp[0][1] = 1;
dp[1][0] = 1;
上面3种初始条件都可以,我们来任选一个,看下代码
1public int uniquePathsWithObstacles(int[][] obstacleGrid) {
2 int m = obstacleGrid.length;
3 int n = obstacleGrid[0].length;
4 int dp[][] = new int[m + 1][n + 1];
5 //初始条件,下面3个任选一个
6 //dp[1][1] = obstacleGrid[0][0] ^ 1;
7 //dp[0][1] = 1;
8 dp[1][0] = 1;
9 for (int i = 1; i <= m; ++i)
10 for (int j = 1; j <= n; ++j)
11 if (obstacleGrid[i - 1][j - 1] == 0)
12 dp[i][j] += dp[i - 1][j] + dp[i][j - 1];
13 return dp[m][n];
14}
15
动态规划空间优化
我们可以参照上一题把二维空间改为一维的,原理很简单,我们来直接看代码
1public int uniquePathsWithObstacles(int[][] obstacleGrid) {
2 int m = obstacleGrid.length;
3 int n = obstacleGrid[0].length;
4 int[] dp = new int[n + 1];
5 dp[1] = 1;
6 for (int i = 0; i < m; i++) {
7 for (int j = 1; j <= n; j++) {
8 if (obstacleGrid[i][j - 1] == 1) {
9 dp[j] = 0;//有障碍物
10 } else {//无障碍物
11 dp[j] += dp[j - 1];
12 }
13 }
14 }
15 return dp[n];
16}
上一题有人问过一个问题说看不懂第11行,这里再说一下,因为是一行一行的遍历,在当前行遍历之前dp(这里是一维数组)表示的是上一行的值,然后遍历到当前行的时候,假如遍历当前行的第j列的时候,那么当前行第j列之前的数据都会被更新掉,当前行第j列之后的数据还是上一行的,所以dp[j]=dp[j]+dp[j-1](为了区分,这里标成了不同的颜色),dp[j]表示的是当前列的上一行值,dp[j-1]表示的是当前行的前一个值。
递归方式
上一题我们提到过,使用递归的方式会造成大量的重复计算,所以为了减少重复计算,这里使用一个map把计算过的值存储起来,下次用的时候先从map中取,如果有就返回,如果没有再计算。
1public int uniquePathsWithObstacles(int[][] obstacleGrid) {
2 return helper(obstacleGrid, 0, 0, new HashMap<String, Integer>());
3}
4
5public static int helper(int[][] obstacleGrid, int down, int right, Map<String, Integer> map) {
6 String key = down + "and" + right;
7 int result = 0;
8 if (map.containsKey(key))
9 return map.get(key);
10 if (obstacleGrid[down][right] == 1) {
11 result = 0;
12 map.put(key, result);
13 return result;
14 }
15 if (right == obstacleGrid[0].length - 1 && down == obstacleGrid.length - 1) {
16 if (obstacleGrid[down][right] == 1) {
17 result = 0;
18 } else {
19 result = 1;
20 }
21 map.put(key, result);
22 return result;
23 }
24 if (right == obstacleGrid[0].length - 1 || down == obstacleGrid.length - 1) {
25 if (right == obstacleGrid[0].length - 1) {
26 result = helper(obstacleGrid, down + 1, right, map);
27 } else {
28 result = helper(obstacleGrid, down, right + 1, map);
29 }
30 map.put(key, result);
31 return result;
32 }
33 result = helper(obstacleGrid, down, right + 1, map) + helper(obstacleGrid, down + 1, right, map);
34 map.put(key, result);
35 return result;
36}
这种不看也可以,因为动态规划非常简单,没人会傻到会使用这种方式,但他也算是提供了一种思路,有时间看看也行。
总结
这题多了一个障碍物的判断,但难度其实并没有增加多少,如果当前位置出现了障碍物,说明不能从当前位置通过,所以当前位置的路径是0,如果当前位置不是0,那么计算就还和以前一样了。
●
●
●
●
长按上图,识别图中二维码之后即可关注。
如果喜欢这篇文章就点个"赞"吧
以上是关于411,动态规划和递归求不同路径 II的主要内容,如果未能解决你的问题,请参考以下文章