对于二维数组,有行优先顺序和啥两种不同的存储方式
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了对于二维数组,有行优先顺序和啥两种不同的存储方式相关的知识,希望对你有一定的参考价值。
对于二维数组,有行优先顺序和什么两种不同的存储方式
对于二维数组,有行优先顺序和列优先顺序两种不同的存储方式。
二维数组A[m][n],这是一个m行n列的二维数组。设a[p][q]为A的第一个元素,即二维数组的行下标从p到m+p,列下标从q到n+q,按“行优先顺序”存储时则元素a[i][j]的地址计算为:LOC(a[i][j]) = LOC(a[p][q]) + ((i − p) * n + (j − q)) * t。
按“列优先顺序”存储时,地址计算为:LOC(a[i][j]) = LOC(a[p][q]) + ((j − q) * m + (i − p)) * t。存放该数组至少需要的单元数为(m-p+1) * (n-q+1) * t 个字节。

扩展资料:
数组中的各元素的存储是有先后顺序的,它们在内存中按照这个先后顺序连续存放在一起。数组中的所有元素都具有相同类型(和结构类中的字段不同,它们可以是不同类型)。数组中的元素存储在一个连续性的内存块中,并通过索引来访问(和结构类中的字段不同,它们通过名称来访问)。
在增加数组的维数时,数组所占的存储空间会大幅度增加,所以要慎用多维数组。使用 Variant 数组时更要格外小心,因为他们需要更大的存储空间。
参考技术A 行优先和列优先两种。具体情况如下:数组的顺序存储方式
由于计算机内存是一维的,多维数组的元素应排成线性序列后存人存储器。
数组一般不做插入和删除操作,即结构中元素个数和元素间关系不变化。一般采用顺序存储方法表示数组。
(1)行优先顺序
将数组元素按行向量排列,第i+1个行向量紧接在第i个行向量后面。
【例】二维数组Amn的按行优先存储的线性序列为:
a11,a12,…,a1n,a21,a22,…,a2n,……,am1,am2,…,amn
注意:
①PASCAL和C语言中,数组按行优先顺序存储。
②行优先顺序推广到多维数组,可规定为先排最右的下标。
(2)列优先顺序
将数组元素按列向量排列,第i+1个列向量紧接在第i个列向量后面。
【例】二维数组Amn的按列优先存储的线性序列为:
a11,a21,…,am1,a12,a22,…,am2,……,a1n,a2n,…,amn
注意:
①FORTRAN语言中,数组按列优先顺序存储。
②列优先顺序推广到多维数组,可规定为先排最左的下标。本回答被提问者采纳
深度优先遍历(DFS)和广度优先遍历(BFS)
1 图的两种存储方式
1.1 邻接矩阵(Adjacency Matrix)
1.1.1 原理
用一维数组存储图中顶点信息;用二维数组(矩阵)存储图中的边和弧的信息。对于无向图来说,如果顶点i与顶点j之间有边,就将A[i][j]和A[j][i]标记为1;对于有向图来说,如果顶点i和顶点j之间,有一条箭头从顶点i指向顶点j的边,就将A[i][j]标记为1,有箭头从顶点j指向顶点i的边,就将A[j][i]标记为1。对于有权图,数组中存储相应权重。
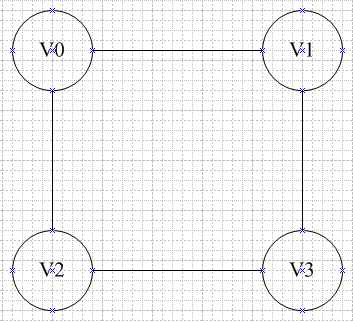
邻接矩阵可表示为:
vertex[4] = {v0, v1, v2, v3};
edge[4][4] = { {0, 1, 1, 0},
{1, 0, 0, 1},
{1, 0, 0, 1},
{0, 1, 1, 0} };
1.1.2 优缺点
1.1.2.1 优点
1)基于数组,存储方式简单、直接,获取顶点关系时非常高效;
2)计算方便,邻接矩阵的方式存储图,可以将很多图的运算转换成矩阵之间的运算。
1.1.2.2 缺点
浪费存储空间。对于无向图来说,如果A[i][j]为1,那么A[j][i]也为1,实际上,我们只需要存储一个就可以了;如果我们存储的是稀疏图(sparse matrix),也就是顶点很多,但每个顶点的边不多,那就更加浪费空间了。
1.1.3 适用场景
1)要求较高速的计算速率;2)运行内存充足;3)图的顶点个数n值较小;4)有向图且为稠密图;
1.1.4 邻接矩阵存储图的代码实现
#ifndef GRAPH_H #define GRAPH_H #define MAX_VERTEX (10) //邻接矩阵图 class AdjacencyMatrixGraph { private: int m_nVertex[MAX_VERTEX]; //顶点数组 int m_nEdge[MAX_VERTEX][MAX_VERTEX]; //邻接矩阵 int m_nCurrentVertex; //当前图中顶点个数 int m_nCurrentEdge; //当前图中边的个数 bool visited[MAX_VERTEX]; //访问数组 public: void CreatGraph(); //创建邻接矩阵图 void DisplayGraph(); //以邻接矩阵形式显示图 void MatrixDFS(); //深度优先遍历 void MDFS(int i); //深度优先遍历递归调用 void MatrixBFS(); //广度优先遍历 }; #endif
/* 创建邻接矩阵图 * 1----2 * / \\ / | * 6 /\\ | 3 * \\ / \\|/ * 5---- 4 * 顶点 6 个、边为 1-2/1-4/1-6/2-3/2-4/2-5/3-4/4-5/5-6共9条 */ void AdjacencyMatrixGraph::CreatGraph() { //输入顶点个数、边数 std::cout << "输入顶点个数、边数:" << std::endl; std::cin >> m_nCurrentVertex >> m_nCurrentEdge; //初始化顶点数组,数组值为下表加1 for (int i = 0; i < m_nCurrentVertex; ++i) { m_nVertex[i] = i + 1; } //初始化邻接矩阵 for (int i = 0; i < m_nCurrentVertex; ++i) { for (int j = 0; j < m_nCurrentVertex; ++j) { m_nEdge[i][j] = 0; } } //初始化图 int m, n; for (int i = 0; i < m_nCurrentEdge; ++i) { std::cout << "输入顶点m、邻接点n" << std::endl; std::cin >> m >> n; m_nEdge[m - 1][n - 1] = m_nEdge[n - 1][m - 1] = 1; } } //以邻接矩阵形式显示图 void AdjacencyMatrixGraph::DisplayGraph() { //显示顶点 std::cout << "顶点有:" << std::endl; for (int i = 0; i < m_nCurrentVertex; ++i) { std::cout << m_nVertex[i] << " | "; } std::cout << std::endl; /*显示邻接矩阵 * 1 2 3 4 5 6 * 1 0 1 0 1 0 1 * 2 1 0 1 1 1 0 * 3 0 1 0 1 0 0 * 4 1 1 1 0 1 0 * 5 0 1 0 1 0 1 * 6 1 0 0 0 1 0 */ std::cout << " "; for (int i = 0; i < m_nCurrentVertex; ++i) { std::cout << m_nVertex[i] << ‘ ‘; } std::cout << std::endl; for (int i = 0; i < m_nCurrentVertex; ++i) { std::cout << i + 1 << ‘ ‘; for (int j = 0; j < m_nCurrentVertex; ++j) { std::cout << m_nEdge[i][j] << ‘ ‘; } std::cout << std::endl; } }
1.2 邻接表(Adjacency List)
1.2.1 原理
邻接表类似于散列表的拉链表示法。每个顶点对应一条链表,链表中存储的是与这个顶点相连接的其他顶点。以上图为例,邻接表可表示为:
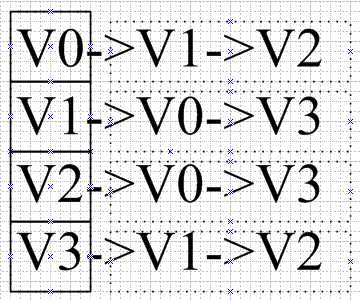
每条链表的头结点组成顶点的数组。
1.2.2 优缺点
1)优点:节省内存空间;2)缺点:邻接表使用起来比较耗时,链表的存储方式堆缓存不友好。
1.2.3 使用场景
1)有内存限制;2)对运行速度要求不高;3)顶点个数较大时;
1.2.4 邻接表存储图的代码实现
#ifndef GRAPH_H #define GRAPH_H //邻接表图 typedef struct AdjacencyNode { //邻接点元素 int m_nAdjacencyNode; //邻接点值 AdjacencyNode* m_pNextNode; }* AdjacencyNodePtr; typedef struct VertexNode { //顶点数组元素 int m_nVertex; //顶点值 AdjacencyNodePtr m_pFirstAdjacencyNode; //顶点的第一邻接点 }* VertexNodePtr; class AdjacencyListGraph { private: VertexNodePtr m_pVertexArr; //指向顶点数组 int m_nCurrentVertex; int m_nCurrentEdge; bool* visited; //指向访问数组 public: void CreatGraph(); //创建邻接表图 void DisplayGraph(); //以邻接表形式显示图 void ListDFS(); //邻接表的深度优先遍历 void LDFS(int n); //深度优先遍历递归函数 void ListBFS(); //邻接表的广度优先遍历 }; #endif
/* 创建邻接矩阵图 * 1----2 * / \\ / | * 6 /\\ | 3 * \\ / \\|/ * 5---- 4 * 顶点 6 个、边为 1-2/1-4/1-6/2-3/2-4/2-5/3-4/4-5/5-6共9条 */ void AdjacencyListGraph::CreatGraph() { std::cout << "输入顶点个数、边数" << std::endl; std::cin >> m_nCurrentVertex >> m_nCurrentEdge; m_pVertexArr = new VertexNode[m_nCurrentVertex]; //初始化顶点数组 for (int i = 0; i < m_nCurrentVertex; ++i) { m_pVertexArr[i].m_nVertex = i + 1; m_pVertexArr[i].m_pFirstAdjacencyNode = nullptr; } //初始化邻接表 for (int i = 0; i < m_nCurrentEdge; ++i) { int m, n; std::cout << "输入边(m, n)" << std::endl; std::cin >> m >> n; //顶点m的邻接表 AdjacencyNodePtr pNewAdjacencyNode = new AdjacencyNode; pNewAdjacencyNode->m_pNextNode = m_pVertexArr[m - 1].m_pFirstAdjacencyNode; pNewAdjacencyNode->m_nAdjacencyNode = n; m_pVertexArr[m - 1].m_pFirstAdjacencyNode = pNewAdjacencyNode; //顶点n的邻接表 pNewAdjacencyNode = new AdjacencyNode; pNewAdjacencyNode->m_pNextNode = m_pVertexArr[n - 1].m_pFirstAdjacencyNode; pNewAdjacencyNode->m_nAdjacencyNode = m; m_pVertexArr[n - 1].m_pFirstAdjacencyNode = pNewAdjacencyNode; } } //已邻接表显示图 void AdjacencyListGraph::DisplayGraph() { for (int i = 0; i < m_nCurrentVertex; ++i) { //显示样例:1->2->4->6 std::cout << m_pVertexArr[i].m_nVertex << "->"; AdjacencyNodePtr pWorkNode = m_pVertexArr[i].m_pFirstAdjacencyNode; while (pWorkNode) { std::cout << pWorkNode->m_nAdjacencyNode; pWorkNode = pWorkNode->m_pNextNode; if (pWorkNode) std::cout << "->"; } std::cout << std::endl; } }
2 深度优先遍历(DFS)
2.1 原理
深度优先遍历(depth first search)图的方式类似于先序遍历二叉树。从图中的某个顶点出发,访问次顶点,然后从该顶点的未被访问的邻接点出发深度优先遍历,直到图中所有和该顶点相通的点都被访问到。
2.2 实现及关键点
2.2.1 关键点
1)由原理可知,深度优先遍历的实现依赖于递归思想,因此特别注意递归公式和递归终止条件;
2)由于二叉树的层次关系,先序遍历二叉树时是层层递进的,不会重复访问已访问过的节点;但是图并没有层次关系,所以要有标记—访问数组,记录已访问过的顶点,防止顶点的重复访问。
2.2.2 实现
//Adjacency Matrix //深度优先遍历 void AdjacencyMatrixGraph::MDFS(int i) { visited[i] = true; std::cout << m_nVertex[i] << " | "; //打印路径 for (int j = 0; j < m_nCurrentVertex; ++j) { if (!visited[j] && m_nEdge[i][j]) { //邻接点未被访问且存在边 MDFS(j); } } } void AdjacencyMatrixGraph::MatrixDFS() { //设置访问数组,访问过的顶点设置为true for (int i = 0; i < m_nCurrentVertex; ++i) { visited[i] = false; } //从其中一个顶点开始遍历图 MDFS(0); std::cout << std::endl; } //Adjacency List void AdjacencyListGraph::LDFS(int n) { visited[n] = true; //当前遍历顶点置true,表示已访问过 std::cout << m_pVertexArr[n].m_nVertex << " | "; //遍历当前顶点各个邻接点 AdjacencyNodePtr pWorkNode = m_pVertexArr[n].m_pFirstAdjacencyNode; int vertex; while (pWorkNode) { vertex = pWorkNode->m_nAdjacencyNode; //邻接点 //如果顶点还未被访问 if (!visited[vertex - 1]) { LDFS(vertex - 1); } else { pWorkNode = pWorkNode->m_pNextNode; } } } void AdjacencyListGraph::ListDFS() { //初始化访问数组 visited = new bool[m_nCurrentVertex]; for (int i = 0; i < m_nCurrentVertex; ++i) { visited[i] = false; } //任选一个顶点开始遍历 LDFS(0); std::cout << std::endl; }
2.3 复杂度分析
2.3.1 邻接矩阵存储方式
1)时间复杂度
遍历每个顶点时,都要判断其余顶点是否与该顶点相邻,所以要遍历整个邻接矩阵中的所有元素,故时间复杂度为O(V2),V为顶点个数。
2)空间复杂度
遍历过程中需要访问数组来标记顶点是否被访问,访问数组大小等于顶点个数V,所以空间复杂度为O(V)。
2.3.2 邻接表存储方式
1)时间复杂度
邻接表的存储方式会先访问顶点,然后再判断链表中的每个邻接点(边),每条会访问2次,所以时间复杂度为O(V+2E),V为顶点个数、E为边的个数。
2)空间复杂度
同邻接矩阵,空间复杂度为O(V)。
3 广度优先遍历(BFS)
3.1 原理
广度优先遍历(breadth first search)可以类比为二叉树的层序遍历;先查找离起始顶点最近的,然后是次进的,依次往外搜索。
3.2 实现及关键点
3.2.1 关键点
1)借助队列将当前遍历顶点的邻接点存储起来,使得搜索路径有层次;
2)同深度优先搜索中,需要借助访问数组标记已访问顶点;
2)顶点元素入队时要将访问数组相关顶点标记为已访问,出队时执行会造成顶点的重复访问。
//Adjacency Matrix void AdjacencyMatrixGraph::MatrixBFS() { //初始化访问数组 for (int i = 0; i < m_nCurrentVertex; ++i) { visited[i] = false; } std::queue<int> vertexQueue; //存放已遍历顶点的邻接点 int frontVertex = 0; //队列中首元素 visited[0] = true; vertexQueue.push(0); //将顶点1放入队列中 while (!vertexQueue.empty()) { frontVertex = vertexQueue.front(); //打印首元素 std::cout << frontVertex + 1 << " | "; //将邻接点加入队列 for (int i = 0; i < m_nCurrentVertex; ++i) { if (!visited[i] && m_nEdge[frontVertex][i]) { visited[i] = true; //注意!访问数组先置位再将顶点下标放入队列,否则会造成重复 vertexQueue.push(i); } } //首元素出列 vertexQueue.pop(); } std::cout << std::endl; } //Adjacency List void AdjacencyListGraph::ListBFS() { //初始化访问数组 visited = new bool[m_nCurrentVertex]; for (int i = 0; i < m_nCurrentVertex; ++i) { visited[i] = false; } std::queue<int> vertexQueue; //存放已访问顶点的邻接点 int vertex = m_pVertexArr[0].m_nVertex; vertexQueue.push(vertex); //将遍历起始点放入队列 visited[vertex - 1] = true; std::cout << vertex << " | "; while (!vertexQueue.empty()) { vertex = vertexQueue.front(); vertexQueue.pop(); AdjacencyNodePtr pWorkNode = m_pVertexArr[vertex - 1].m_pFirstAdjacencyNode; while (pWorkNode) { vertex = pWorkNode->m_nAdjacencyNode; if (!visited[vertex - 1]) { vertexQueue.push(vertex); visited[vertex - 1] = true; std::cout << vertex << " | "; } pWorkNode = pWorkNode->m_pNextNode; } } std::cout << std::endl; }
2.4 复杂度分析
2.4.1 邻接矩阵存储方式
1)时间复杂度
遍历过程中,每个顶点出队时,都要判断与该顶点相邻的所有顶点是否已访问,因为遍历整个图,所以所有顶点都要有入队、出队操作,所以时间复杂度为O(V2)。
2)空间复杂度
遍历操作用到访问数组与队列,队列长度不超过顶点个数,所以空间复杂为O(V)。
2.4.2 邻接表存储方式
1)时间复杂度
同样的,每个顶点出队时,都要遍历其邻接点链表(边),所以时间复杂度为O(V+2E)。
2)空间复杂度
同邻接矩阵存储方式,空间复杂度为O(V)。
该篇博客是自己的学习博客,水平有限,如果有哪里理解不对的地方,希望大家可以指正!
以上是关于对于二维数组,有行优先顺序和啥两种不同的存储方式的主要内容,如果未能解决你的问题,请参考以下文章