opencv 怎么识别出红色物体呀
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv 怎么识别出红色物体呀相关的知识,希望对你有一定的参考价值。
我用 Imgproc.cvtColor(src, dst, Imgproc.COLOR_RGB2HSV_FULL);将原图像转换到HSV空间之后,该怎么做呀,红色物体在HSV空间的阈值怎么设呢?急急!~非常感谢
实现方法:1、颜色分割,算重心;
2、返回一张灰度图,算法是:B = A(R) / ((A(G) + A(B)/2);
3、检测到运动的目标,把目标的大小尺寸记录下来,然后是跟踪 ,混合高斯模型建模就可以找到运动的目标;
4、返回红色分量的强度,对于白色来说,也能够通过除法来降低,从而返回红色区域。在上面进行图像增强就行了。 参考技术A 红色物体?那如果是一个红色的点呢?追问
红色物体是主要的,有一定大小,若只是区域小甚至只是点则要剔除
追答恩!!那你用那个cvget2d~~获取红颜色色素,包括物体,包括点的~~但是如果才能获取红颜色的,不获取点的~~这时你就要自己写算法了!!算法的原理是,计算出堆积在一起的红色有多少,设定个面积~~如果超出,则为你要的红色物体~~如果少于面积,就你说的剔除!懂我意思吧?
追问关键是用那个cvget2d~~获取红颜色色素,怎么判断哪些是红色呢?
追答你去百度查下这个函数怎么用!百度一大堆!!
ROS-opencv-人脸识别-物体追踪-二维码识别
前言:人脸识别是基于人的脸部特征信息进行身份识别的一种生物识别技术。用摄像机或摄像头采集含有人脸的图像或视频流,并自动在图像中检测和跟踪人脸,进而对检测到的人脸进行脸部识别的一系列相关技术,通常也叫做人像识别、面部识别。
一、人脸识别
启动命令
cd ~/catkin_ws/src/robot_perception/robot_vision/launch
roslaunch usb_cam.launch
cd ~/catkin_ws/src/robot_perception/robot_vision/launch
roslaunch face_detector.launch
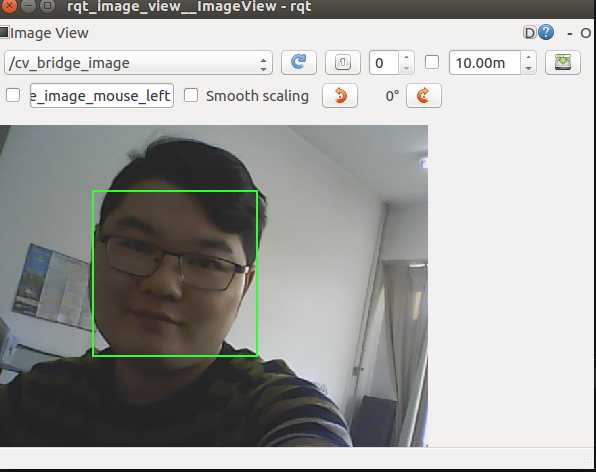
rqt_image_view
-------------------------------
显示效果:绿色边框就是识别效果
二、物体追踪
输入命令:
cd ~/catkin_ws/src/robot_perception/robot_vision/launch
roslaunch usb_cam.launch
cd ~/catkin_ws/src/robot_perception/robot_vision/launch
roslaunch motion_detector.launch
rqt_image_view
------------------------------
效果不是太好,有待探究
三、二维码识别
安装功能包
sudo apt-get install ros-kinetic-ar-track-alvar
-----------------------
不想写了..
-END-
以上是关于opencv 怎么识别出红色物体呀的主要内容,如果未能解决你的问题,请参考以下文章