常用的图像识别方案
Posted YK疯狂机器人
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了常用的图像识别方案相关的知识,希望对你有一定的参考价值。
懒得写开场白了~
1 图像特征法
图像识别常用的方法,首先是图像特征的识别。图像特征有颜色特征、形状特征、空间关系特征等。
1.1 颜色特征
颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。
常用的特征提取与匹配方法
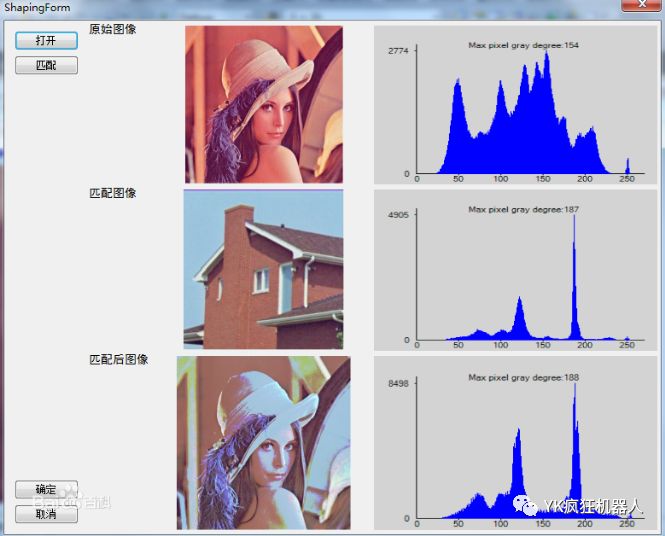
(1) 颜色直方图
其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。
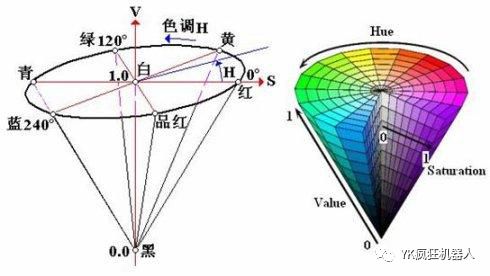
最常用的颜色空间:RGB颜色空间、HSV颜色空间。
颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。
(2) 颜色集 (如 HSV 空间)
颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从 RGB颜色空间转化成视觉均衡的颜色空间(如 HSV 空间,色调(H),饱和度(S),亮度(V))。,并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系
(3) 颜色矩 (颜色分布)
图像中任何的颜色分布均可以用它的矩来表示。此外,由于颜色分布信息主要集中在低阶矩中,因此,仅采用颜色的一阶矩(mean)、二阶矩(variance)和三阶矩(skewness)就足以表达图像的颜色分布。
(4) 颜色聚合向量
其核心思想是:将属于直方图每一个柄的像素分成两部分,如果该柄内的某些像素所占据的连续区域的面积大于给定的阈值,则该区域内的像素作为聚合像素,否则作为非聚合像素。
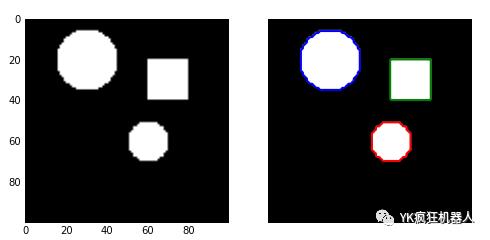
1.2 形状特征
各种基于形状特征的检索方法都可以比较有效地利用图像中感兴趣的目标来进行检索,但也有一些问题:①目前基于形状的检索方法还缺乏比较完善的数学模型;②许多形状特征仅描述了目标局部的性质,要全面描述目标常对计算时间和存储量有较高的要求; ③特征空间的相似性与人视觉系统感受到的相似性有差别。
常用的特征提取与匹配方法:
Ⅰ 通常情况下,形状特征有两类表示方法,一类是轮廓特征,主要针对物体的外边界;另一类是区域特征关系到整个形状区域。
几种典型的形状特征描述方法:
(1)边界特征法:
该方法通过对边界特征的描述来获取图像的形状参数。其中Hough 变换检测平行直线方法和边界方向直方图方法是经典方法,是利用图像全局特性而将边缘像素连接起来组成区域封闭边界的一种方法,其基本思想是点—线的对偶性;边界方向直方图法首先微分图像求得图像边缘,然后,做出关于边缘大小和方向的直方图,通常的方法是构造图像灰度梯度方向矩阵。
(2)傅里叶形状描述符法:
傅里叶形状描述符(Fourier shape deors)基本思想是用物体边界的傅里叶变换作为形状描述,利用区域边界的封闭性和周期性,将二维问题转化为一维问题。
(3)几何参数法:
形状的表达和匹配采用更为简单的区域特征描述方法,例如采用有关形状定量测度(如矩、面积、周长等)的形状参数法(shape factor)。在 QBIC 系统中,便是利用圆度、偏心率、主轴方向和代数不变矩等几何参数,进行基于形状特征的图像检索。
需要说明的是,形状参数的提取,必须以图像处理及图像分割为前提,参数的准确性必然受到分割效果的影响,对分割效果很差的图像,形状参数甚至无法提取。
(4)形状不变矩法:
利用目标所占区域的矩作为形状描述参数。
(5)其它方法
有限元法(Finite Element Method 或 FEM)、旋转函数(Turning )和小波描述符(Wavelet Deor)等方法。
1.3 空间关系特征
所谓空间关系,是指图像中分割出来的多个目标之间的相互 的空间位置或相对方向关系。通常空间位置信息可以分为两类:相对空间位置信息(目标之间的相对情况,如上下左右关系等)和绝对空间位置信息(目标之间的距离大小以及方位)。
空间关系特征的使用可加强对图像内容的描述区分能力,但空间关系特征常对图像或目标的旋转、反转、尺度变化等比较敏感。另外,实际应用中,仅仅利用空间信息往往是不够的,不能有效准确地表达场景信息。为了检索,除使用空间关系特征外,还需要其它特征来配合。
常用的特征提取与匹配方法:
提取图像空间关系特征可以有两种方法:一种方法是首先对图像进行自动分割,划分出图像中所包含的对象或颜色区域,然后根据这些区域提取图像特征,并建立索引;另一种方法则简单地将图像均匀地划分为若干规则子块,然后对每个图像子块提取特征,并建立索引。
特征提取:
特征是描述模式的最佳方式,且特征的各个维度能够从不同的角度描述模式,在理想情况下,维度之间是互补完备的。特征抽取的主要思想是将原始样本投影到一个低维特征空间,得到最能反应样本本质或进行样本区分的低维样本特征。

2 三种物体识别算法
SIFT/SURF,haar特征,广义hough变换——都基于灰度图。
2.1 SIFT(尺度不变特征变换)/SURF(Sift的加速版)
尺度不变特征转换(Scale-invariant feature transform或SIFT)是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量。
(1)SIFT算法可以解决的问题:
目标的自身状态、场景所处的环境和成像器材的成像特性等因素影响图像配准/目标识别跟踪的性能。而SIFT算法在一定程度上可解决:
1. 目标的旋转、缩放、平移(RST);2. 图像仿射/投影变换(视点viewpoint);3. 光照影响(illumination);4. 目标遮挡(occlusion);5. 杂物场景(clutter);6. 噪声
(2)SIFT算法分解为如下四步:
1. 尺度空间极值检测:搜索所有尺度上的图像位置。通过高斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点。
2. 关键点定位:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。
3. 方向确定:基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向。所有后面的对图像数据的操作都相对于关键点的方向、尺度和位置进行变换,从而提供对于这些变换的不变性。
4. 关键点描述:在每个关键点周围的邻域内,在选定的尺度上测量图像局部的梯度。这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变形和光照变化。
2.2 haar特征
首先通过大量的具有比较明显的haar特征(矩形)的物体图像用模式识别的方法训练出分类器,分类器是个级联的,每级都以大概相同的识别率保留进入下一级的具有物体特征的候选物体,而每一级的子分类器则由许多haar特征构成(由积分图像计算得到,并保存下位置),有水平的、竖直的、倾斜的,并且每个特征带一个阈值和两个分支值,每级子分类器带一个总的阈值。识别物体的时候,同样计算积分图像为后面计算haar特征做准备,然后采用与训练的时候有物体的窗口同样大小的窗口遍历整幅图像,以后逐渐放大窗口,同样做遍历搜索物体;每当窗口移动到一个位置,即计算该窗口内的haar特征,加权后与分类器中haar特征的阈值比较从而选择左或者右分支值,累加一个级的分支值与相应级的阈值比较,大于该阈值才可以通过进入下一轮筛选。当通过分类器所以级的时候说明这个物体以大概率被识别。
2.3 广义hough变换
使用轮廓作为特征,融合了梯度信息,以投票的方式识别物体。
2.4 适用范围
三种算法都只是基于强度(灰度)信息。
SIFT/SURF的特征是一种具有强烈方向性及亮度性的特征,这使得它适用于刚性形变,稍有透视形变的场合;
haar特征识别方法带有一点人工智能的意味,对于像人脸这种有明显的、稳定结构的haar特征的物体最适用,只要结构相对固定即使发生扭曲等非线性形变依然可识别;
广义hough变换完全是精确的匹配,可得到物体的位置方向等参数信息。
前两种方法基本都是通过先获取局部特征然后再逐个匹配,只是局部特征的计算方法不同,SIFT/SURF比较复杂也相对稳定,haar方法比较简单,偏向一种统计的方法形成特征,这也使其具有一定的模糊弹性;广义hough变换则是一种全局的特征——轮廓梯度,但也可以看做整个轮廓的每一个点的位置和梯度都是特征,每个点都对识别有贡献,用直观的投票,看票数多少去确定是否识别出物体。
参考资料出处:
1、图像特征:
https://blog.csdn.net/cloverwindy/article/details/8443296
2、三种物体识别算法:
https://blog.csdn.net/liuqz2009/article/details/47623647
3、轮廓识别:
https://blog.csdn.net/bcbobo21cn/article/details/50904209
4、颜色识别:
https://blog.csdn.net/liuqz2009/article/details/47623399
以上是关于常用的图像识别方案的主要内容,如果未能解决你的问题,请参考以下文章