本期聚焦·自动化技术基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统
Posted 港口科技
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了本期聚焦·自动化技术基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统相关的知识,希望对你有一定的参考价值。
基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统
陈 幸, 郗传龙, 单 佳
(上海振华重工(集团)股份有限公司, 上海 200125)
摘要: 为解决RTG大车运行时定位精度差的问题,采用图像识别与电磁感应相结合的方法进行大车纠偏和定位控制。经测试,稳定运行时大车纠偏摆动幅度为±40 mm,大车智能相机侧定位精度为±20 mm,BTG天线侧定位精度为±15 mm,满足RTG在自动化堆场内作业时的大车定位和纠偏要求。
关键词: 港口;RTG;自动纠偏和定位;图像识别;BTG
0 引 言
轮胎式集装箱起重机(以下简称“RTG”)是集装箱码头堆场内重要的装卸设备,具有成本低、跨堆场作业灵活的特点。[1] RTG高25 m,长23 m,宽14 m,共有8个承重轮,其中2个为主动轮。一般将RTG动力房侧称为前侧,电气房侧称为后侧。在RTG大车行驶前,需要将小车开至电气房侧,这就造成在大车运行过程中电气房侧轮胎负载明显大于动力房侧轮胎负载,导致电气房侧轮胎磨损相对较大,即使两侧变频器给定相同的速度,也无法保证RTG大车沿着地面车道线行驶。
因此,RTG在大车运行时需要司机进行手动纠偏与定位,此操作一方面增加大车运行的操作难度,另一方面也增加司机的劳动强度。随着自动化技术在港口的应用,RTG大车自动运行已成为必然趋势,本文介绍一种基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统。
1 方案比较
1.1GPS纠偏和定位方案
GPS差分放大技术可用于RTG大车纠偏和定位,但GPS系统的成本较高,存在短时间定位精度差的问题,导致系统稳定性较差,无法保证RTG大车的纠偏和定位精度。经测试,如果RTG的作业区域在岸桥附近,GPS信号较弱,会导致大车纠偏功能差和定位误差大。因此,工作区域的限制进一步降低GPS系统在RTG大车纠偏和定位系统中应用的可行性。
1.2 检测掩埋体纠偏和定位系统
在地面埋设检测体或者划检测线进行RTG大车纠偏与定位。此方案具有成本低和施工量小的优点,但检测时易受外部环境干扰,系统运行不稳定,且无法实现RTG全天候作业。
1.3 图像识别纠偏和定位系统
在RTG动力房侧跑道基内侧的一定距离位置处安装具有特殊编码的定位板,见图 1。在RTG大车上安装的智能相机识别定位板上的编码,并将采集到的数据信息传给PLC,PLC计算出大车偏移情况和位置信息,再通过智能控制算法实现大车高精度的纠偏和定位功能。该系统采用大车位置自校验来提高系统稳定性,同时运用智能控制算法来保证系统可靠性。
图1 定位板
1.4 图像识别+BTG纠偏和定位系统
虽然图像识别纠偏和定位系统具有较好的纠偏和定位功能,但该方案只是运用了单侧定位技术,无法控制未安装智能相机的另一侧。RTG跨度较大,且轮胎柔性较大,采用单侧定位控制时,经常会出现定位侧大车到达目标位置,而非定位侧与目标位置还有一定距离偏差。此工况会导致全自动RTG在堆区内自动叠放箱时需要花费较长的时间进行吊具微调,有时甚至会因为调节范围过大而报故障,影响作业效率。为解决上述问题,在图像识别纠偏和定位系统的非定位侧安装BTG定位系统,以保证大车运动时两侧能同时到位。
综上所述,选择基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统,该系统既有较好的纠偏功能,又有精准的定位功能。
2 系统应用
2.1 系统架构
系统由智能相机、定位板、安装支架、遮光罩、BTG天线、BTG磁钉、信号转换传输系统及PLC控制器等组成。
智能相机安装在RTG大车动力房侧的左右两端。为保证纠偏效果,两相机的安装间距须大于6 m。所选用的智能相机具有红外补光功能,可保证系统全天候工作,不受雨雪天气影响。智能相机通过TCP/IP协议与安装在电气房内的PLC控制器进行通信。
在与大车运行车道相隔一定距离的位置安装定位板,将带有编码的反光条贴在定位板上,使定位板上每个位置具有唯一性。编码与定位板其他部分具有强对比度,保证智能相机准确地识别编码。智能相机和定位板安装位置见图2。
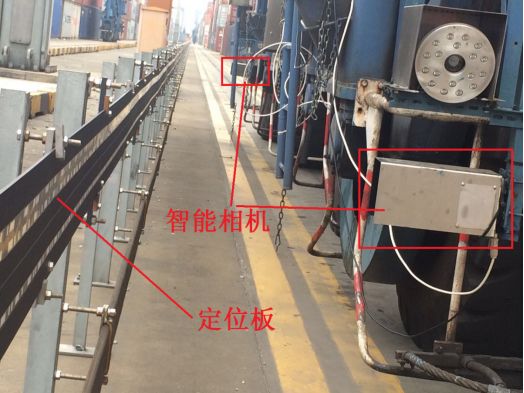
图2 智能相机和定位板安装位置
BTG天线见图3,安装于RTG大车电气房侧。安装时,BTG天线中心要与电气房侧大车中心位置重合。

图3 BTG天线
BTG磁钉具有信息存储功能,把贝位中心坐标信息存储于磁钉中,然后将其安装至堆场内的贝位中心。BTG磁钉见图4。

图4 BTG磁钉
2.2 智能相机参数设置
智能相机在使用之前需要进行相关参数的设定,例如相机曝光时间、特征点识别参数、分辨率、灵敏度、设备通信参数等。智能相机与PLC之间采用TCP/IP协议进行通信,相机为Server端,PLC为Client端,两者须在同一网段。参数设置完成后智能相机识别出的图像见图5。
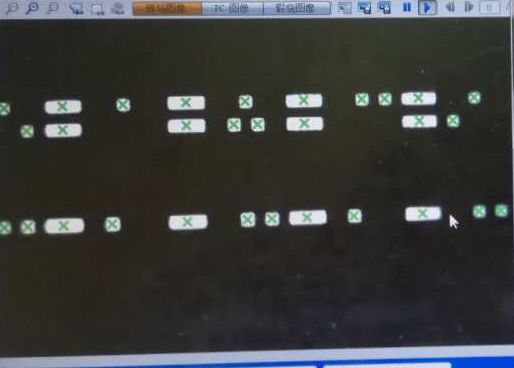
图5 参数设置完成后智能相机识别出的图像
2.3 控制流程
利用图像识别技术,智能相机将识别到的编码信息传给PLC,PLC对这些数据进行处理后得到大车中心位置,同时计算出2个智能相机到定位板的距离,该距离值能反映出大车此时的姿态。由PLC中的智能算法分别计算出动力房侧和电气房侧主动轮的速度,两侧主动轮形成差速,以此进行自动纠偏。
当RTG大车中心位置距目的贝位中心位置的距离大于阈值时,智能算法根据2个智能相机至定位板的距离进行自动纠偏。当RTG大车中心位置距目的贝位中心位置的距离小于阈值时,智能算法根据大车动力房侧大车中心位置与目的贝位中心位置差给该侧主动轮速度,智能算法根据大车电气房侧BTG天线中心位置与目的贝位中心位置差给该侧主动轮速度。用此方法能够确保大车停车时,两侧大车中心位置都在目的贝位中心,实现精确定位。RTG大车纠偏和定位流程见图6。
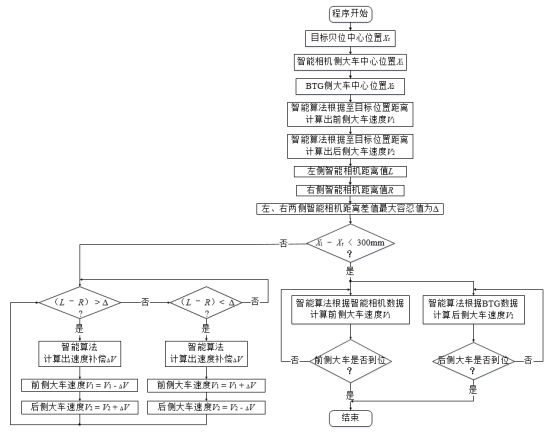 图6 大车纠偏与定位流程
图6 大车纠偏与定位流程
2.4 纠偏性能
RTG大车运行位置见图7。当RTG大车在堆区内从92 000 mm位置运动至115 500 mm位置(大车往右运行)时,大车在12 s时开始运动,在42 s时停止。
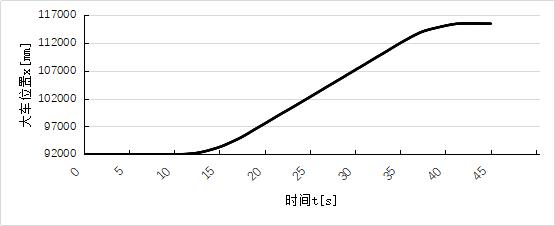 图7 大车运行位置图
图7 大车运行位置图
当RTG大车刚开始向右运行时,由于小车位于电气房侧,电气房侧的轮胎受压明显大于动力房侧,轮胎磨损也相对较大,即使两侧变频器给定相同的速度,大车也会出现跑偏现象,左侧相机靠近定位板,右侧相机远离定位板。当大车运行至27 s时,大车车身已基本与地面车道线平行,在此后的运行中,大车继续自动纠偏,左右智能相机至定位板的距离值比较接近,大车纠偏摆动幅度控制在20 mm以内,自动纠偏效果较好。在运动过程中RTG大车左右2个智能相机至定位板的距离见图8。
图8 在运动过程中大车左右两个智能相机至定位板的距离
3 系统应用的注意事项
基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统对安装施工要求较高,主要注意事项如下:
在安装智能相机时,须保证相机镜头平面与定位板平行,同时避免太阳光直接照射相机。
堆场地面不平整、大车加减速等因素会导致大车运行时智能相机上下起伏,致使智能相机识别不到定位板上的编码,从而引发大车位置和大车至定位板距离计算错误。为避免出现该问题,安装时需要确保智能相机镜头中心与定位板中心在同一高度。
若存在多个堆场和多台RTG,须保证各堆场定位板安装高度一致,各RTG上智能相机安装的高度也一致。
在BTG天线和磁钉安装的一定范围内不能有高压电缆等,避免出现EMC干扰。磁钉安装在地下时,必须采用特制的材料进行密封,且密封层厚度须达到12 mm,磁钉周围不能有金属材料,特别是不能安装在钢筋结构网中。
4 结 语
基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统通过大量的现场试验及算法改进,已达到预期的设计目标,具有故障率低、施工量小、定位精准、稳定性好等优点。系统稳定运行时,大车纠偏摆动幅度为±40 mm,大车智能相机侧定位精度为±20 mm,BTG天线侧定位精度为±15 mm,很好地满足RTG在堆区内全自动化作业时的大车定位和纠偏要求。
该系统已成功应用于上海港外高桥四期集装箱码头的RTG远程半自动改造项目中,已稳定运行2 a。该系统也应用在和黄泰国蓝菜帮全自动RTG项目中,获得用户的认可。
参考文献
[1] 陆青.集装箱轮胎式起重机远程作业的技术研究[J].起重运输机械,2012(12):28-31.
以上是关于本期聚焦·自动化技术基于图像识别和电磁感应技术的RTG大车自动纠偏和定位系统的主要内容,如果未能解决你的问题,请参考以下文章
图像识别技术能否用于投资?——基于PCANet的价值成长多因子选股模型