尺度不变特征方法在图像识别与目标定位中的应用(上)
Posted 计算机经
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了尺度不变特征方法在图像识别与目标定位中的应用(上)相关的知识,希望对你有一定的参考价值。
摘要
本专利描述了一种用于图像识别中的尺度不变特征的方法与设备,以及其在图像中定位目标中的应用。用于识别尺度不变特征的方法和设备,可以包括使用处理器电路,该处理器电路针对由图像产生的多个差异图像中的像素幅度极值附近的像素区域的每个子区域,产生多个分量子区域描述符。这可以包括通过模糊初始图像,以产生模糊图像,并且通过从初始图像中减去模糊图像,以产生差分图像来产生多个差异图像。对于每个差异图像,定位像素幅度极值,并且围绕每个像素幅度极值,定义相应的像素区域。每个像素区域被分成多个子区域,并且为每个子区域产生多个分量子区域描述符。这些分量子区域描述符与正在考虑的图像的分量子区域描述符相关,并且当足够数量的分量子区域描述符(尺度不变特征)定义的聚合相关性超过与目标相关联的分量子区域描述符(尺度不变特征)时,指示检测到目标。
声明
发明领域
本发明涉及物体识别,更具体地说,涉及识别图像中的尺度不变特征及其在图像中定位物体的应用。
专利背景
随着机器人技术和工业自动化的出现,越来越需要将计算机视觉系统整合到工业系统中。当前的计算机视觉技术通常涉及产生用作模板的多个参考图像,并将参考图像与所考虑的图像进行比较,以确定所考虑的图像是否与参考图像之一匹配。因此,比较是在完整图像的基础上进行的。然而,现有系统通常仅在二维上是准确的,并且通常要求获取物体图像的相机必须在物体上方或在预定方位上才能在二维上观察物体。同样,所考虑的图像必须从相同角度拍摄。这些限制对如何实现计算机视觉系统施加了限制,从而使此类系统难以在某些应用程序中使用。因此,将需要一种计算机视觉系统,该计算机视觉系统可操作来确定在从几乎任何方向拍摄的图像中并且在变化的照明条件下是否存在物体。
专利内容
本发明通过提供一种用于识别图像中的尺度不变特征的方法和设备以及用于使用这种尺度不变特征在图像中定位物体的另一种方法和设备来满足上述需求。特别地,用于识别尺度不变特征的方法和设备可以包括处理器电路,该处理器电路针对由图像产生的多个差异图像中的像素幅度极值附近的像素区域的每个子区域产生多个分量子区域描述符。这可以包括通过模糊初始图像以产生模糊图像并且通过从初始图像中减去模糊图像以产生差分图像来产生多个差异图像。连续的模糊和减法可用于产生连续的差分图像,其中在连续的模糊功能中使用的初始图像包括在先前的模糊功能中产生的模糊图像。
已经产生了差异图像,该方法和设备可以进一步包括在差异图像中定位像素幅度极值。这可以通过处理器电路来完成,该处理器电路将所考虑的图像中的每个像素的幅度与所考虑的图像中的每个像素周围的区域中的像素的幅度进行比较,以识别局部最大和最小幅度像素。考虑中的像素周围的区域可以包括同一图像中的像素区域和至少一个相邻图像(例如前任图像或后继图像)或两者中的像素区域。
该方法和设备可以进一步包括使用处理器电路为每个差异图像中的每个像素产生像素梯度矢量,并使用极值附近的像素的像素梯度矢量来产生具有取向的图像变化趋势矢量,该取向为与每个差异图像中相应的最大和最小幅度像素相关联。
多个分量子区域描述符可以由处理器电路通过在每个差异图像中定义关于相应的最大和最小幅度像素的区域并在每个这样的区域中定义子区域来产生。
通过使用每个子区域内的像素的像素梯度矢量,可以为每个子区域累积在预定方向范围内的方向上的矢量的大小。这些数字代表子区域描述符,描述参考图像的尺度不变特征。通过从不同角度和不同光照条件下拍摄对象的图像,并使用上述过程,可以生成参考对象的比例尺不变特征库。
另一方面,本发明提供了一种用于在图像中定位对象的方法和设备。处理器用于对所考虑的图像进行与上述参考图像相同的处理,以产生与参考图像相关联的多个比例尺不变特征或子区域描述符。然后,将考虑中的图像的尺度不变特征与描述已知对象的参考图像的尺度不变特征相关联,并且当考虑中图像的足够数量的尺度不变特征定义了超过阈值相关性的集合相关性时,指示物体的检测具有与对象关联的比例不变特征。
因此,实际上,相关涉及使用处理器电路来确定从图像产生的多个差异图像中关于像素幅度极值的多个像素子区域的分量子区域描述符与多个像素的参考分量描述符之间的相关性。从参考图像中的至少一个参考对象的图像产生的多个差异图像中,像素幅值极值附近的像素子区域。
可以由处理器电路通过将分量子区域描述符和参考分量描述符应用于霍夫变换来执行相关。霍夫变换可以产生正在考虑中的图像内的对象的参考成分描述符的列表以及来自比例尺不变特征库的匹配参考成分描述符的列表。这些列表可以应用于最小二乘拟合算法,该算法试图识别多个最佳拟合参考分量描述符,该描述符描述了可能的物体之一。在找到最合适的子区域描述符之后,可以容易地识别出从其产生参考成分描述符的图像,并且因此可以确定与这种参考成分描述符相关联的对象的比例和方向以及标识,以精确地标识对象及其方向和其比例及其在所考虑图像中的位置。
通过结合附图阅读以下对本发明的特定实施例的描述,本发明的其他方面和特征对于本领域普通技术人员将变得显而易见。
简要说明
在说明本发明实现的附图中,
图1是根据本发明的第一实施例的用于识别图像的尺度不变特征并且用于使用尺度不变特征在图像中定位对象的系统的图示。
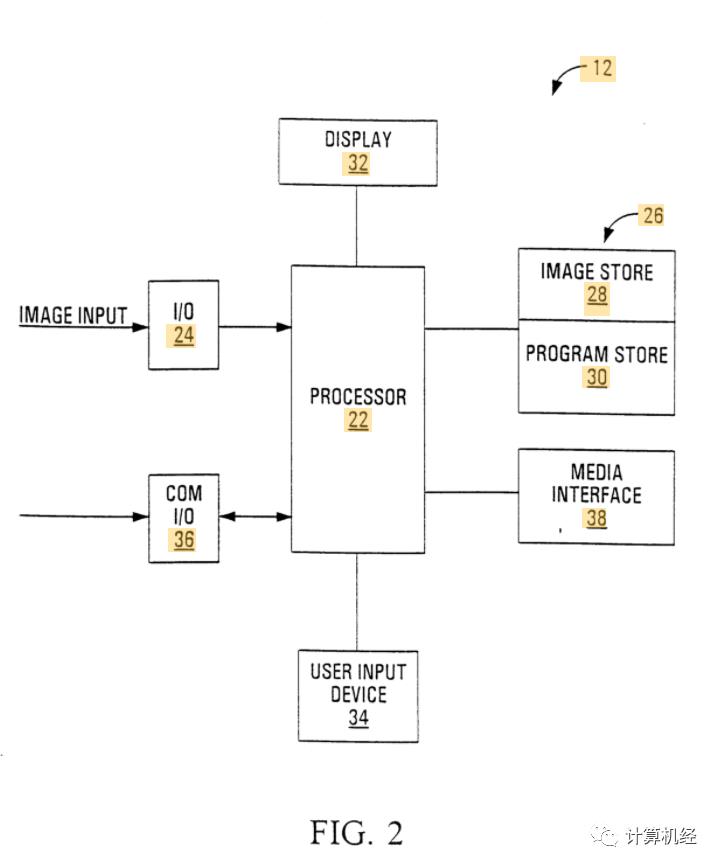
图2是图1所示的计算机系统的框图1;
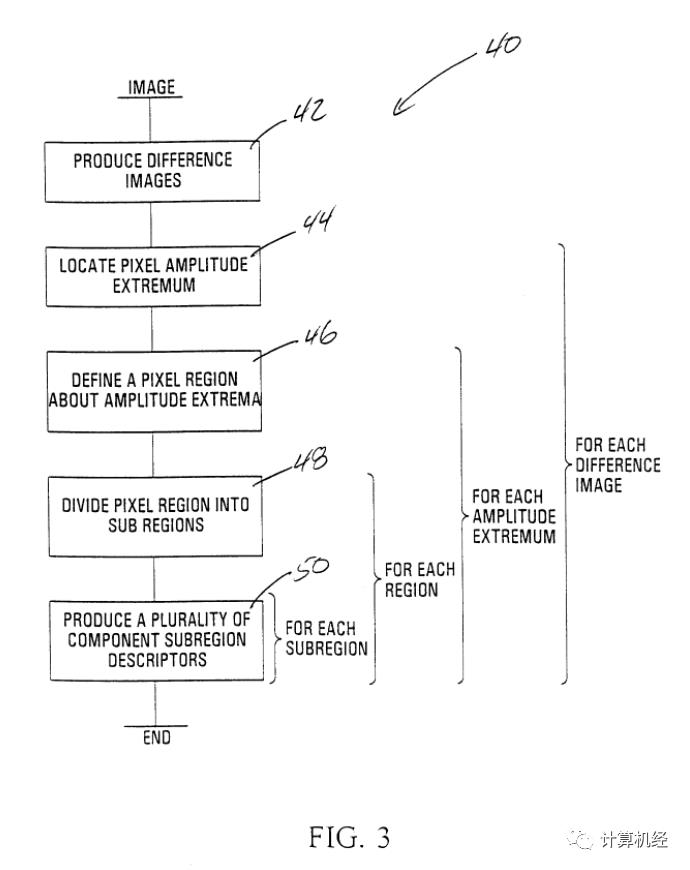
图3是由图2所示的处理器执行的,用于产生多个成分子区域描述符的处理的流程图2;
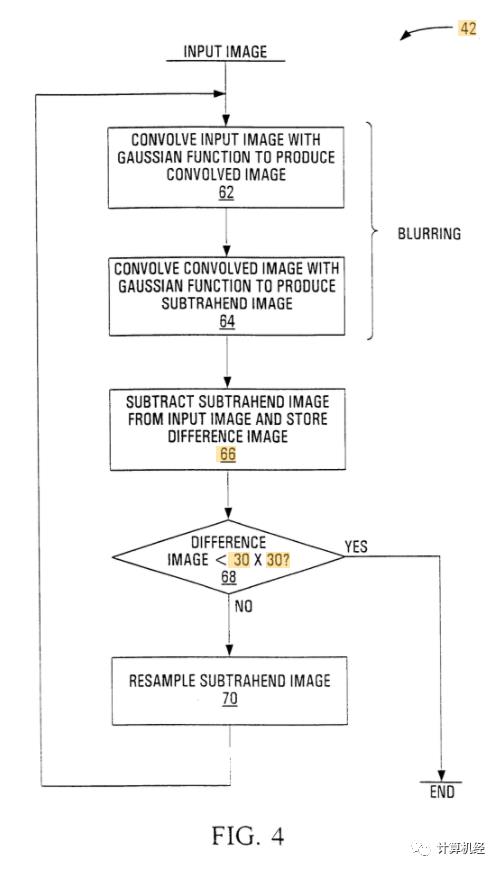
图4是由图3所示的处理器执行的处理(图2),用于产生差异图像;
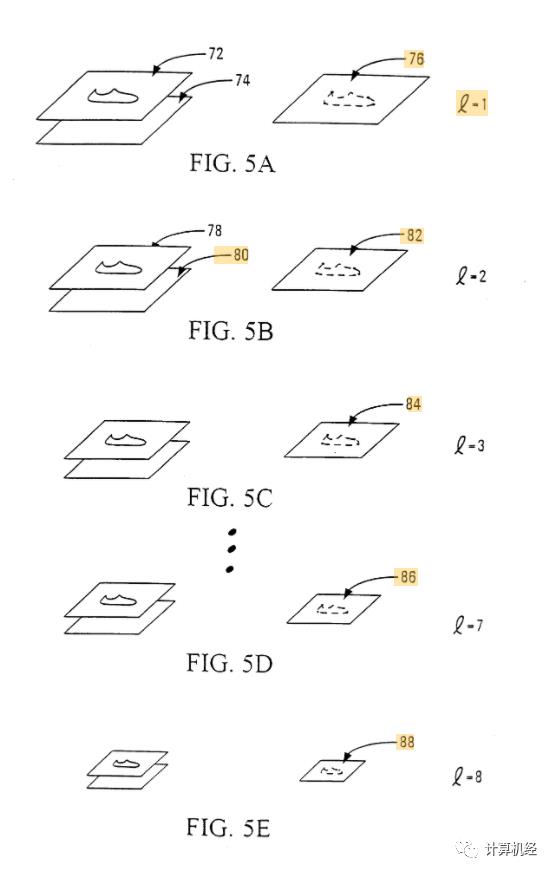
图5a-5e表示多个初始图像和模糊图像以及由此产生的相应差异图像;
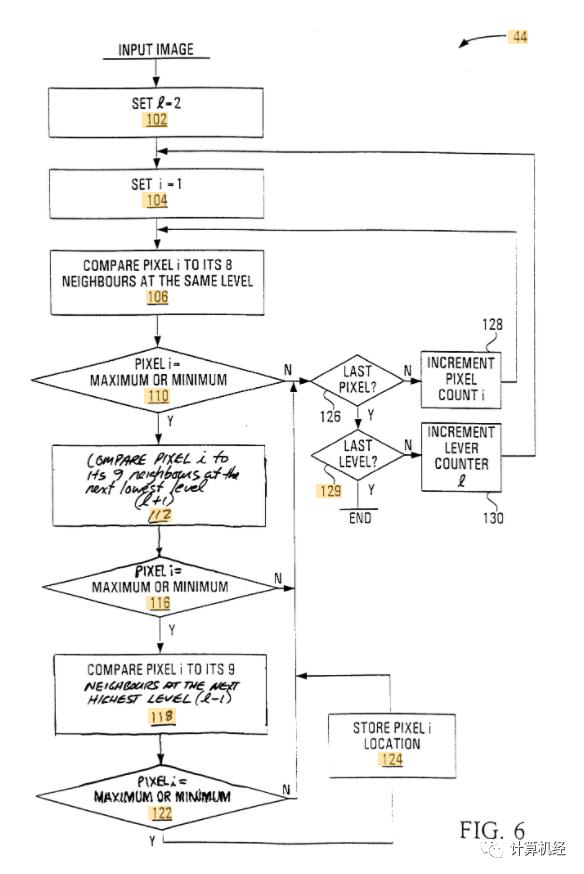
图6是在图5所示的处理器上执行的处理的流程图(图2)用于定位像素振幅极值;
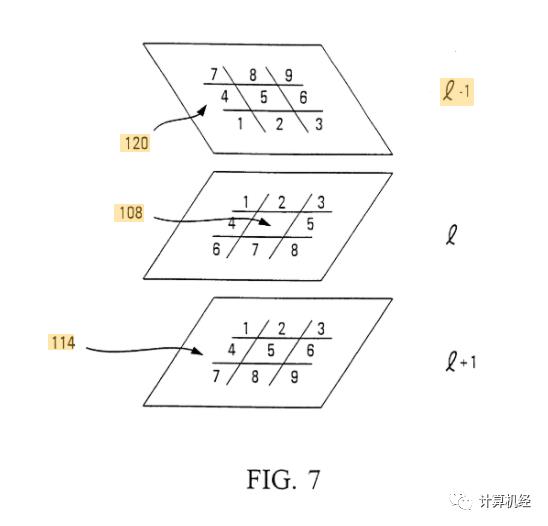
图7是当前图像中的最近邻居和所考虑的像素的相邻图像的图形表示;
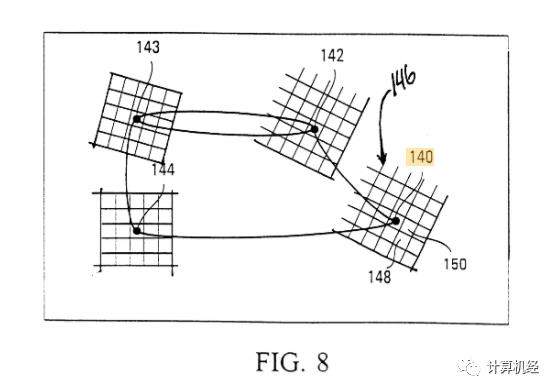
图8是输入图像的多个极值的图形表示,具有与该极值有关的相关区域和子区域;
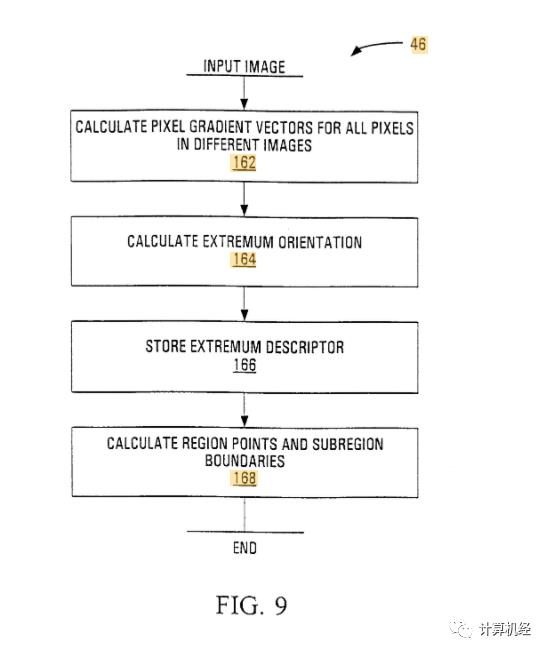
图9是由图1所示的处理器执行的处理的流程图。如图2所示,用于定义关于振幅极值的像素区域并将该像素区域划分为子区域;
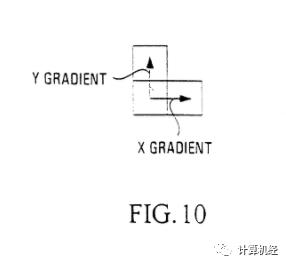
图10是用于计算像素向量的像素的示意图。
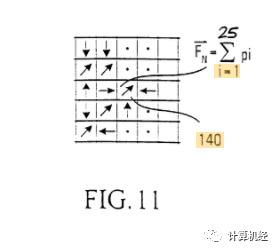
图11是用于计算振幅极值的方向的,关于振幅极值的像素的示意图。
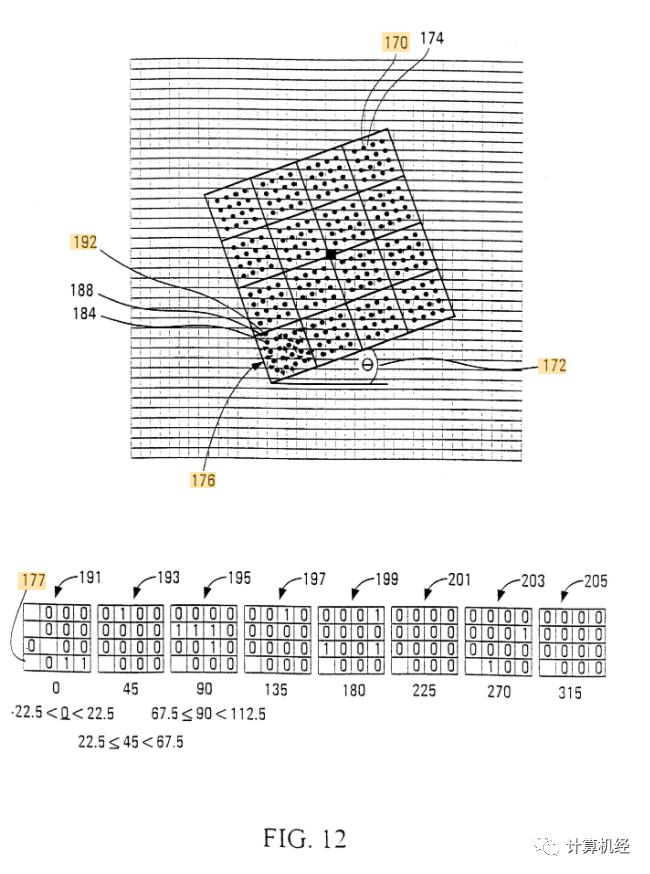
图12是围绕振幅极值的区域的图示,该区域已经被划分为多个子区域。
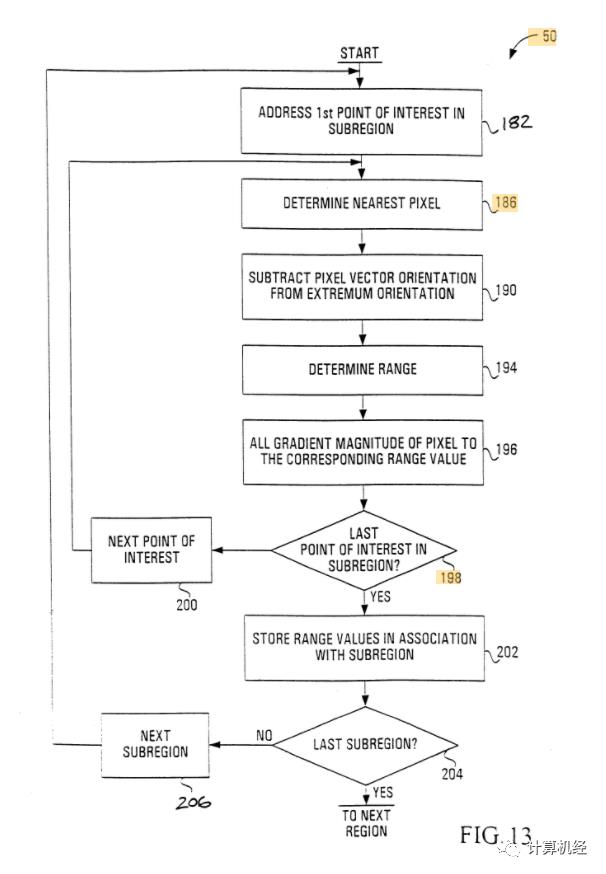
图13是由图12所示的处理器执行的处理的流程图(图2),用于为图像中的振幅极值产生多个分量子区域描述符;
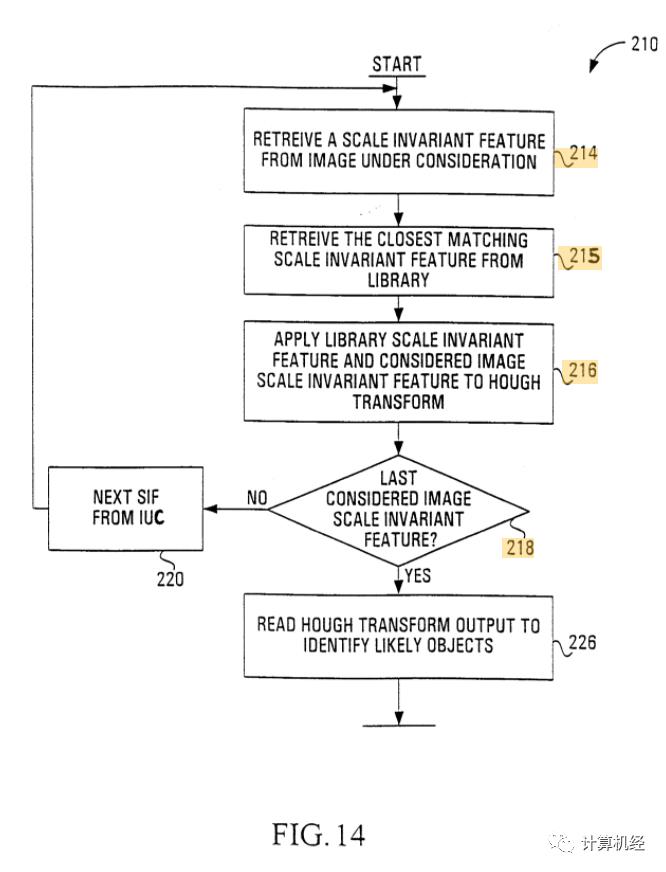
图14是由图13所示的处理器执行的处理的流程图(图2),用于识别所考虑图像中的可能物体,以及
图15是由图13所示的处理器执行的处理(图2)是用于应用最小二乘数据拟合算法来缩放由图1所示的过程产生的列表中的对象的不变特征的图。在图14中,指示对象在所考虑的图像中存在或不存在,并且指示对象在所考虑的图像中的位置,大小和方向。
以上是关于尺度不变特征方法在图像识别与目标定位中的应用(上)的主要内容,如果未能解决你的问题,请参考以下文章