军工AI基于图像处理与图像识别的经典探地雷达识别
Posted DeepAI 视界
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了军工AI基于图像处理与图像识别的经典探地雷达识别相关的知识,希望对你有一定的参考价值。
本文为论文解读,为2008年发布的基于传统图像处理与识别论文,目标是探地雷达信号的识别。

本课题的研究内容:

1、讨论了各种探地雷达杂波抑制方法,数字图像的基本理论和图像倾 斜矫正方法,重点介绍了均值法去背景这种最常用的杂波抑制方法,分析 实现了图像的分割技术、滤波技术以及腐蚀与膨胀技术。从浅地层探地雷 达图像的特点出发,提出一种基于图像处理技术抑制探地雷达杂波的方 法。
2、分析了浅地层探地雷达合成孔径成像与普通雷达合成孔径成像的不 同。研究了探地雷达合成孔径成像时的一个重要参数——波速的估计问 题,使用了一种基于Hou曲变换的波速估计方法。在各种探地雷达合成 孔径成像方法中,改进了一种快速微波全息合成孔径成像方法。
3、介绍了针对B.scan的探地雷达目标识别与定位方法,在前述所提 杂波抑制的基础上运用并实现了一种有效的特征提取方法和基于模糊聚 类分析的自动识别方法,并实现了一种基于窗口划分的目标定位方法。
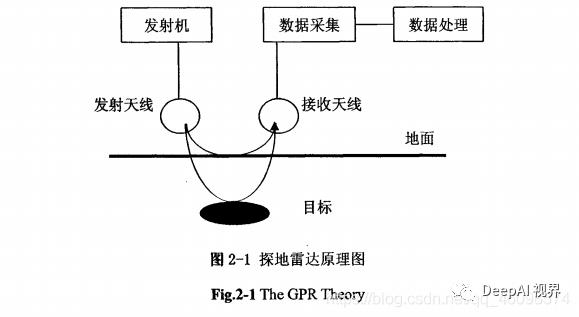
探地雷达原理
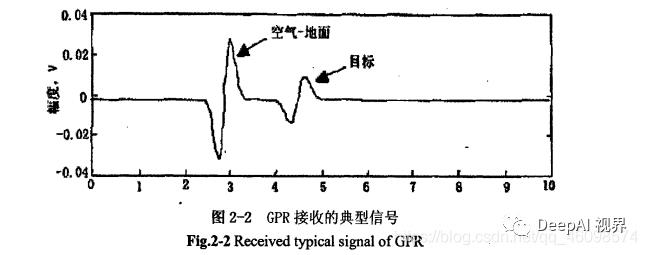
探地雷达(c№und Penetrating Radar简称GPR)是一种对地下或物体内不可见的目 标或界面进行定位的电磁技术,它利用高频电磁波(106~109H萄,以宽频带短脉冲形 式由地面发射天线定向送入地下,电磁波在介质特性变化的界面上发生反射,通过接 收反射回波信号,根据其延时、形状及频谱特性等参数,解译出目标深度、结构及性 质。在数据处理的基础上,应用数字图像的恢复与重建技术,对地下目标进行成像处 理,以期达到对地下目标真实和直观的再现。探地雷达工作原理如下图所示:雷达发射机通过发射天线向地下发射电磁波,遇 到地表及地下目标,由于介质的不连续性将会产生回波,接收天线接收到这些回波信 号,送到数据采样系统进行采样,采样后的数据送处理系统进行各种处理,以判断地 下目标的有无及相关特性。如图2—1所示下图是一个典型的GPR接收回波。第一个也是最大的回波是空气一土壤的界面引 起的,在时间上稍微靠后出现的回波是目标回波或浅地层的杂波。通过在地面移动天 线的位置,可以得到二维或三维的图像

GPR接收的典型信号

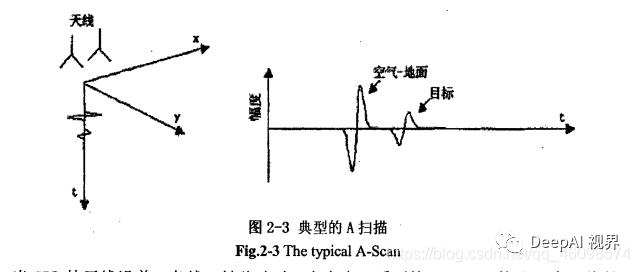
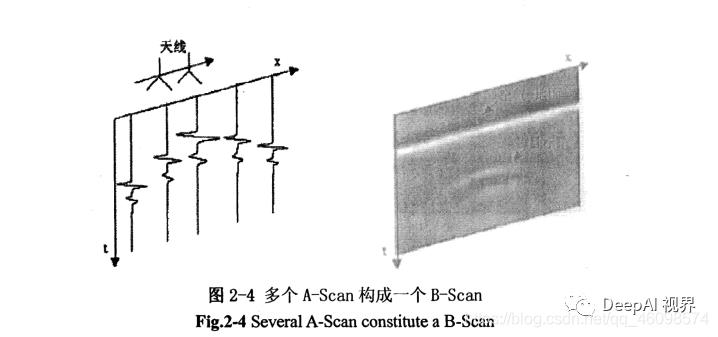
为了能够成功地进行探测,GPR必须获得足够的信杂比(SCR)、足够的信噪比 (SNR)、足够的方位分辨率和深度分辨率。目前GPR的数据记录一般都是一维、二 维或三维数据图,而且采用的声学术语为A-ScaIl、B.Scan和c.sc趾。 在一个给定的固定位置(‘,y,),通过GPR记录的一个单一波形彳(t,y,,f)就称之为 A-Scan,如图2—3所示,波形中唯一的变量是时间,并且介质中的波速和深度有一 定的关系。当GPR的天线沿着一条线x轴移动时,会产生一系列的A—Scan,构成一个二维的 数据集称之为B—Scan,如图2—4所示。当接收信号的幅度通过灰度级描述 时,可以产生一个二维的图像,如图,二维图像描述了土壤的一个垂直切面。时间轴 或相应的深度轴常指向下方。

通过收集多个甲行的旷Scan,或者在xy平面的栅格点上移动天线就得到一个三维的数掘集称之为C—Scan(如图2—6所示)。通常情况下,Scan被描述成二维的图像。比如:在一个时刻画出记录数据的幅度就得到一个二维图像,图像是在一具体深度平行于记录平面的水平切面

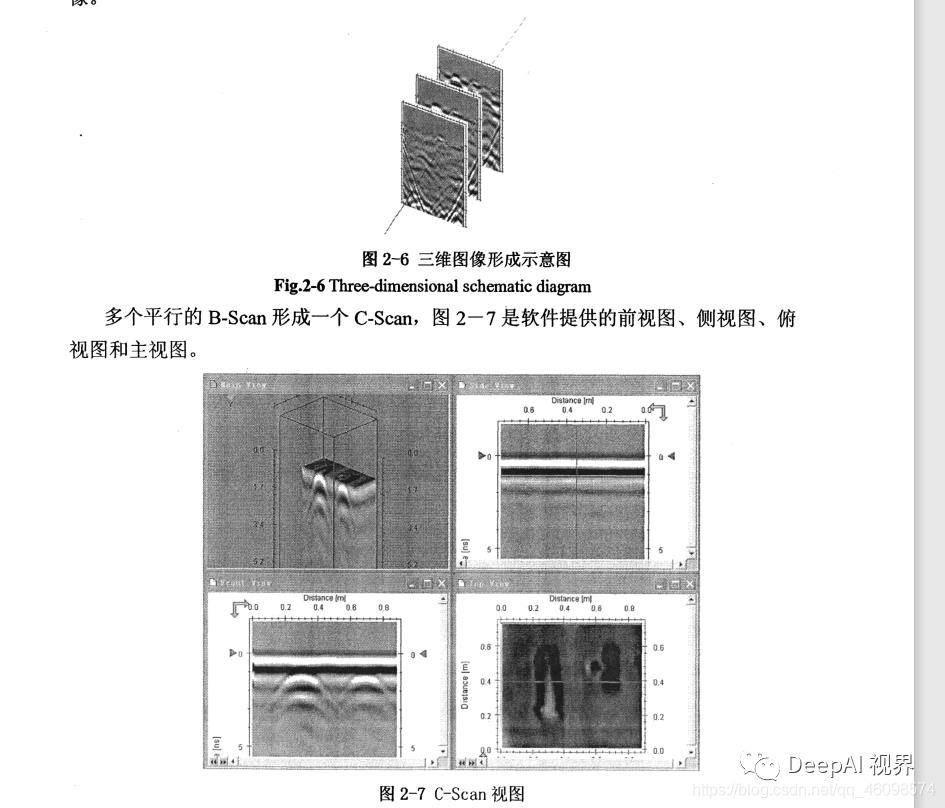

探地雷达图像预处理
探地雷达杂波定义为:与目标散射特性无关,但与目标子波出现在同一采样时间窗内且与目标子波有相似的谱特性的信号。因此探地雷达杂波可看作是除了目标回波以外的各种回波,通常包括天线直达波、地表回波、地下介质非均匀产生的回波、伪目标所产生的回波等等。探地雷达杂波严重影响了探地雷达的探测性能,使得对地下目标的探测变得非常困难,对于非金属目标等浅地层埋地目标尤其如此。对于非金属目标这类浅地层埋地目标,由于其体积小,金属成分少,使得目标回波与地表回波相比是较弱的成分。因此抑制探地雷达杂波是探地雷达信号处理的首要任务
抑制探地雷达杂波就是要去除探地雷达数据中的非目标回波,使目标回波得到增强,从而有利于对埋地目标的探测。通常探地雷达杂波抑制重点针对地表回波及地下介质非均匀产生的回波等杂波成分,而对天线直达波、伪目标所产生的回波等杂波成分不作重点研究。这是因为对于一部实际使用的探地雷达,一般情况下天线直达波在各个A.scaIl数据上出现的时间与幅度均相等,是一个确定信号,可通过天线设计、加屏蔽及探地雷达数据减去一个定信号等方法加以去除,因此在探地雷达信号处理中不作重点研究。对于伪目标所产生的回波,需用目标识别的方法解决,不在通常的探地雷达杂波抑制研究之列。本章的杂波抑制研究也是如此,主要针对地表回波及地下介质非均匀产生的回波等杂波成分。此外本章所研究的方法都是针对B.scaIl数据,由于B—scaIl数据由多个A.scan数据组成,而多个B.scan数据又组成了C.scall数据,因此研究针对B.scall数据的方法最具代表性。
传统上最常用且最简单的均值法去背景是探地雷达杂波抑制方法中的一种,该方法对一些有规则的杂波有效,如平整光滑地表所产生的回波。由于在各个A.scan数据上所处的位置及幅度几乎相同,这时用均值法很有效。
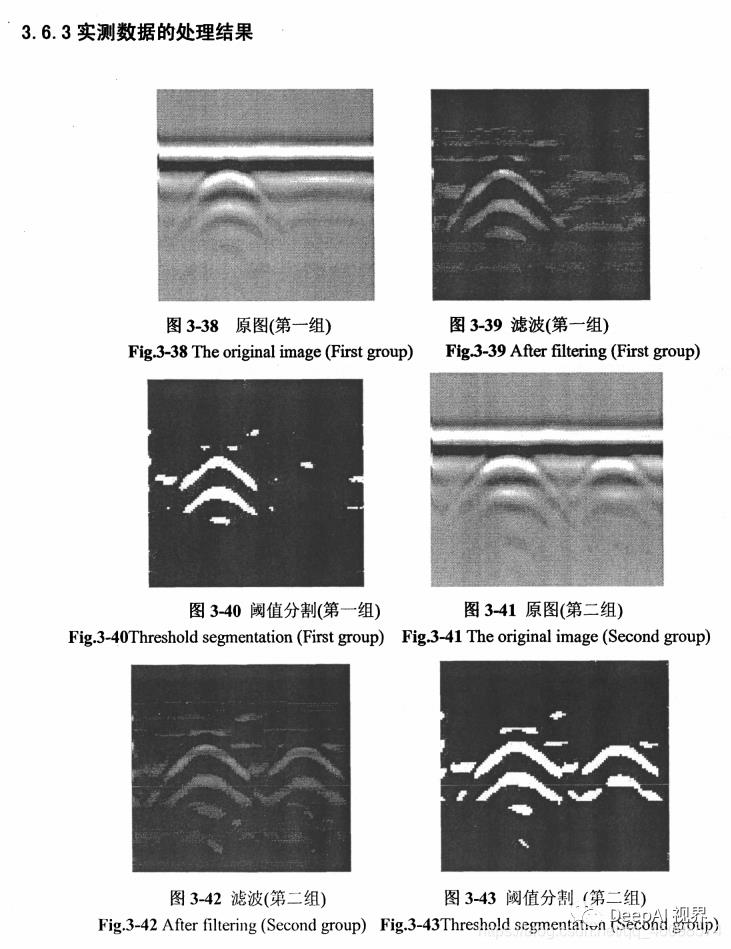
对于抑制探地雷达杂波,本章提出了一种基于图像处理技术抑制探地雷达杂波的方法。由于所依据的探地雷达图像特点具有不变性,使得该方法对各种探地雷达及各种介质情况都适用,因此通用性强。通过对实测数据进行处理,结果表明所提的方法取得了很好的效果。
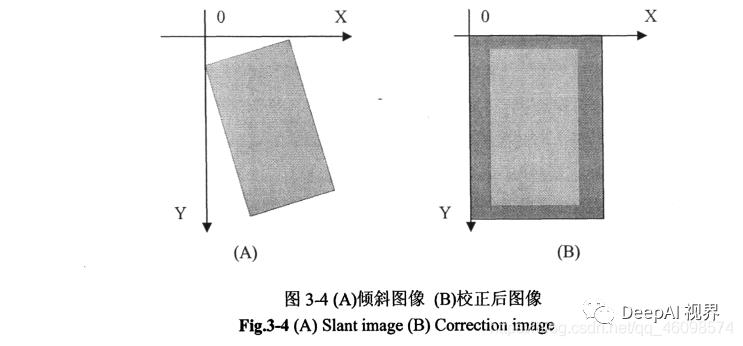
图像倾斜矫正
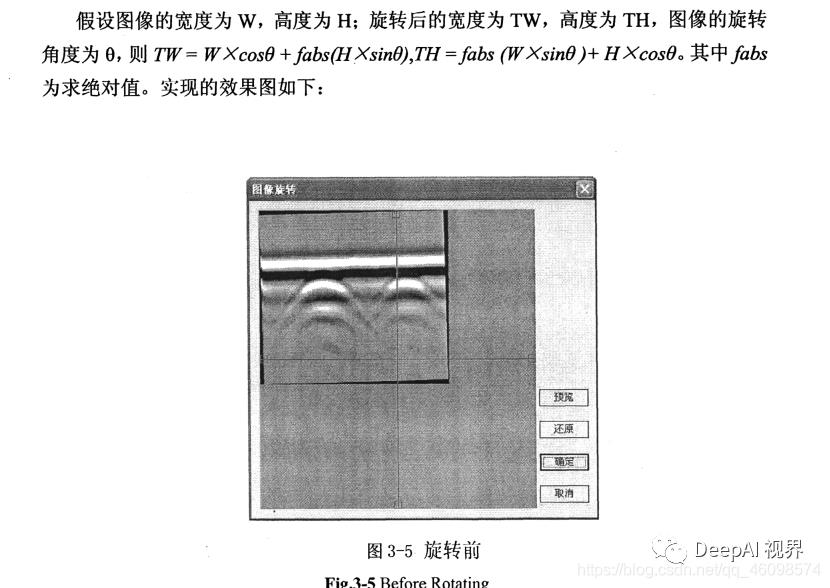
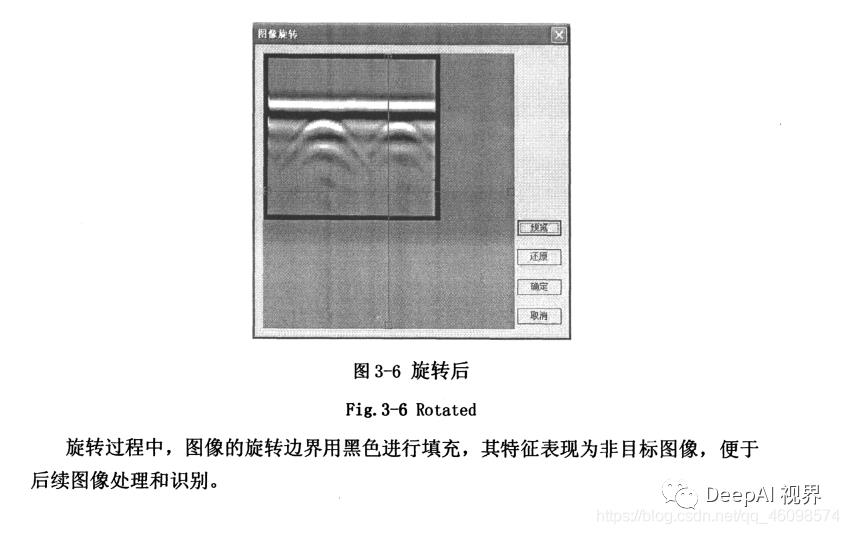
图像在处理之前可能会有倾斜,因此要对图像进行倾斜矫正,旋转示意图:
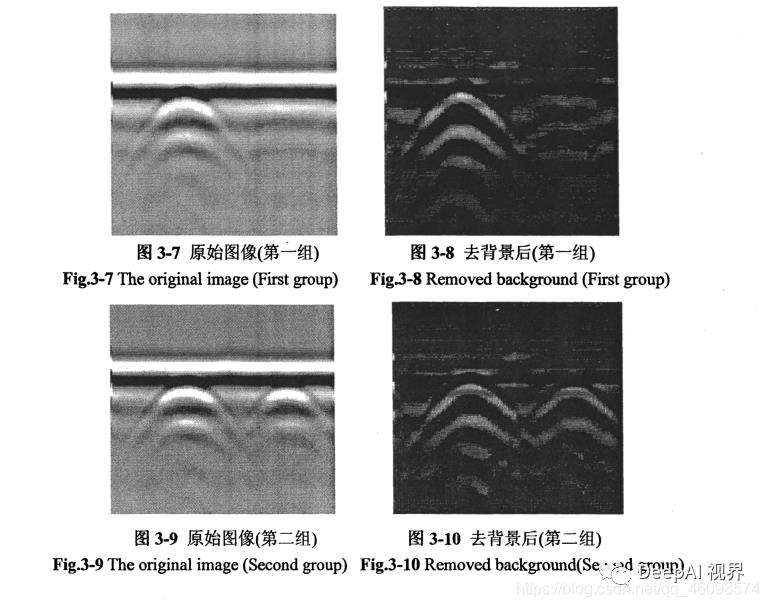
均值法去背景原理与实现
图3.7至图3.10为均值法处理数据的结果。从图中可看出,均值法能去除绝大部分地表杂波。其原因分析如F:由于在B—scan中每个A—scan的地表回波等杂波时延大致相同,使得它们在矩阵中同行不同列上的值非常接近,而目标匣I波由于在不同的列上其时延不同,使它们在矩阵中所处行不同,每一行都减去该行均值后,就使得整个矩阵的元素值差别不足很大,同时保留了有无目标的相对信息,从而去除了绝大部分地表杂波。
图像分割技术
图像分割就是将图像表示为物理上有意义的连通区域的集合。人们一般通过对图像的不同特征如边缘、纹理、颜色、亮度等的分析达到图像分割的目的。图像分割通常是为了进一步对图像进行分析、识别、跟踪、理解、压缩编码等,分割的准确性直接影响后续任务的有效性,因此具有卜分重要的意义。
图像分割方法可以大致分为四个方面:
1)利用图像灰度统计信息的方法。典型的有一维直方图阈值化方法和二维直方图阈值化方法。
2)利用图像空问区域信息和光谱信息的图像分割方法。这类分割方法典型的包括区域分裂一合并、生长法、纹理分割和多光谱图像分割等。
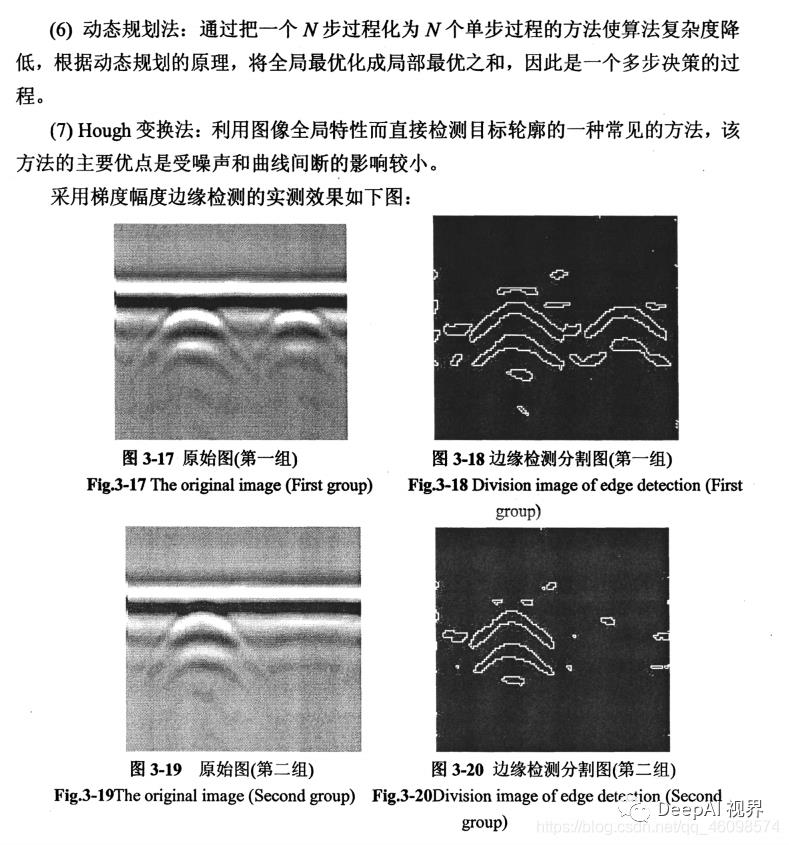
3)利用图像种灰度变化最强烈的区域信息方法一边缘检测方法。这一类方法是Marr理论中主要倡导的方法,它在图像分割研究领域中占的比例最大,其典型的有
CaJllly算法、Ca小Hildreth算法和基于多尺度的边缘检测方法。
4)利用图像分类技术进行图像分割的象素分类方法。典型的有统计分类方法,模糊分类方法与神经网络分类方法等。
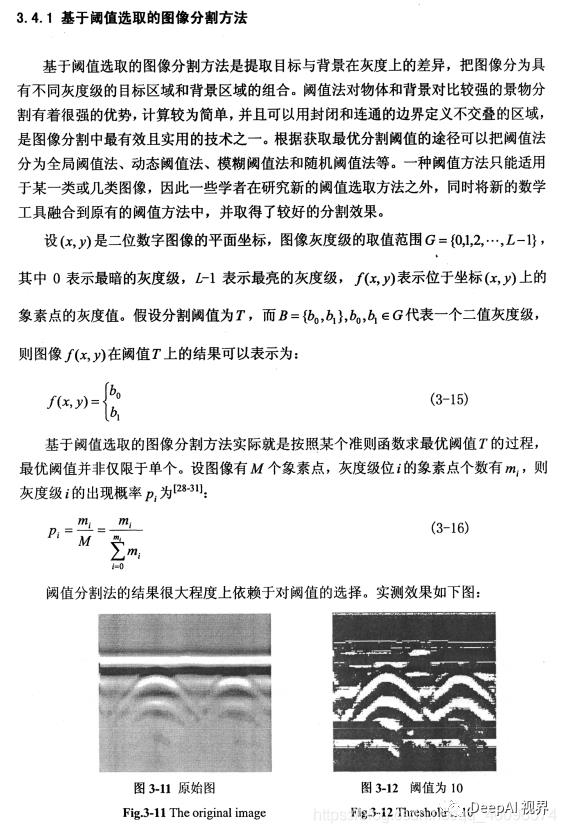
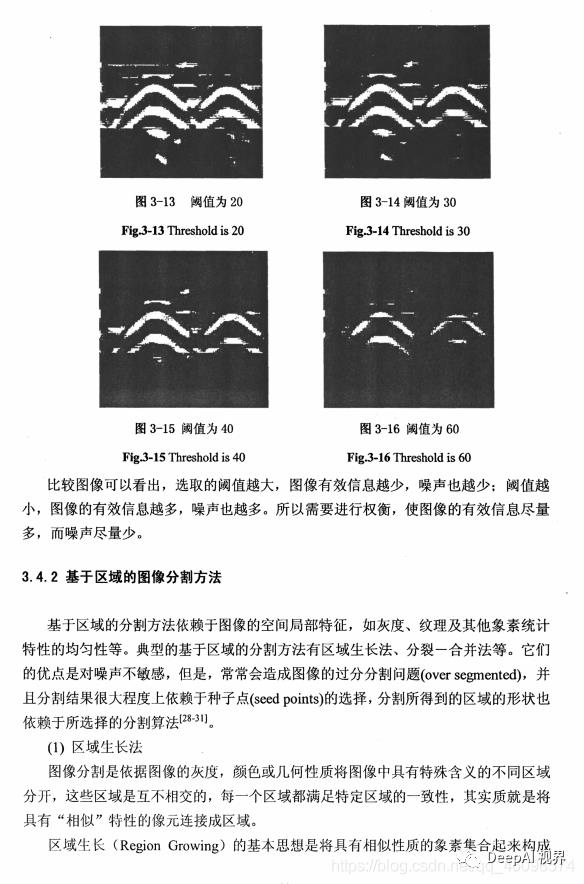
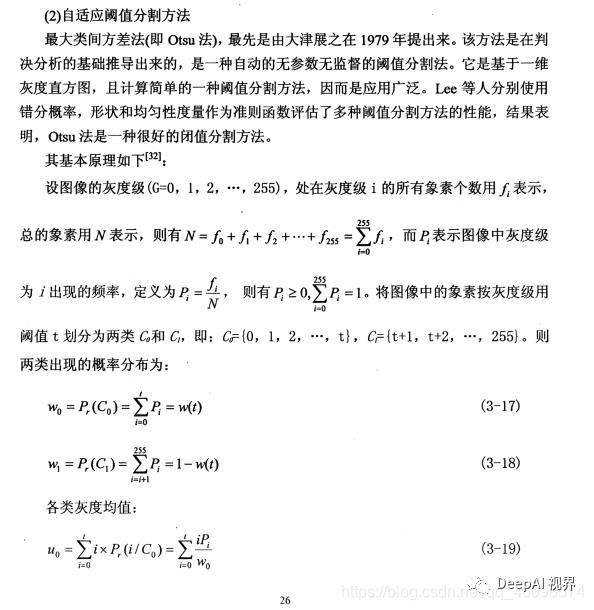
阈值分割技术的实现
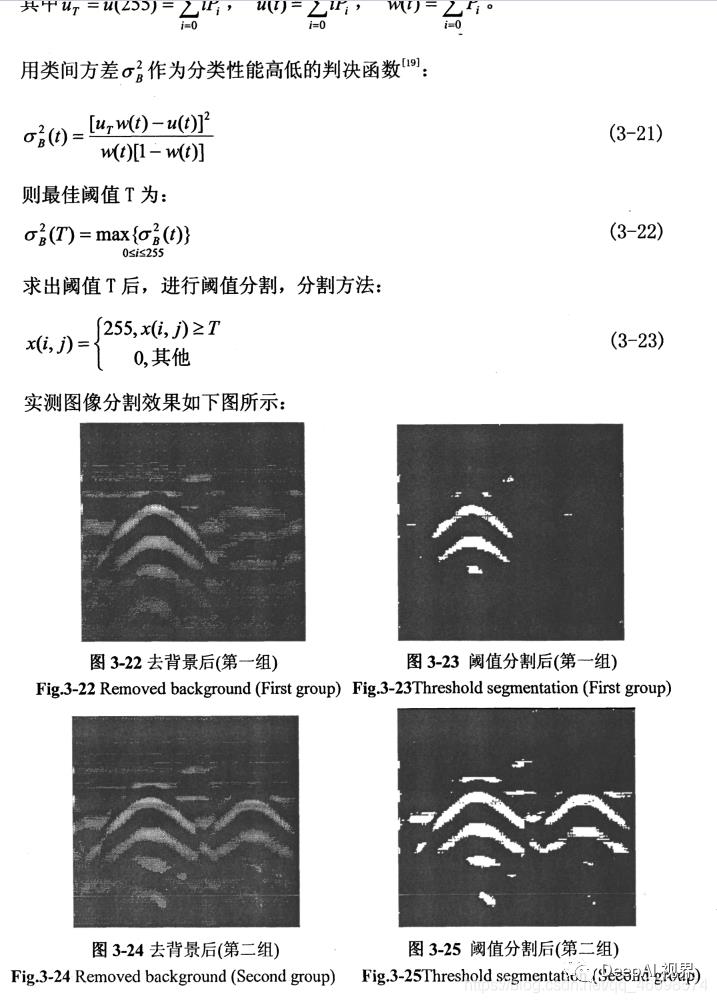
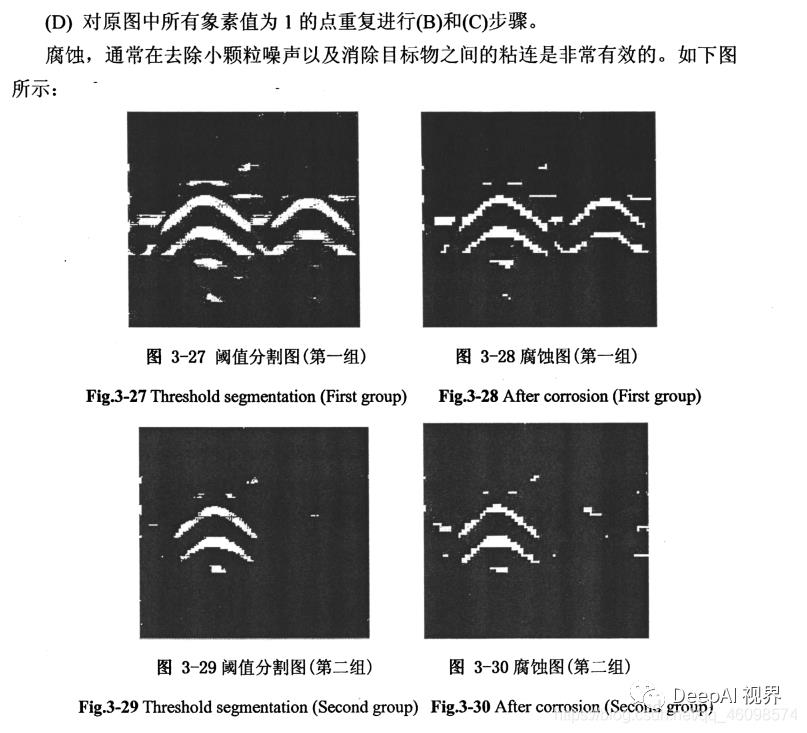
腐蚀与膨胀技术

探地雷达杂波抑制研究与实现
(1)地表回波在浅地层探地雷达图像中的特点
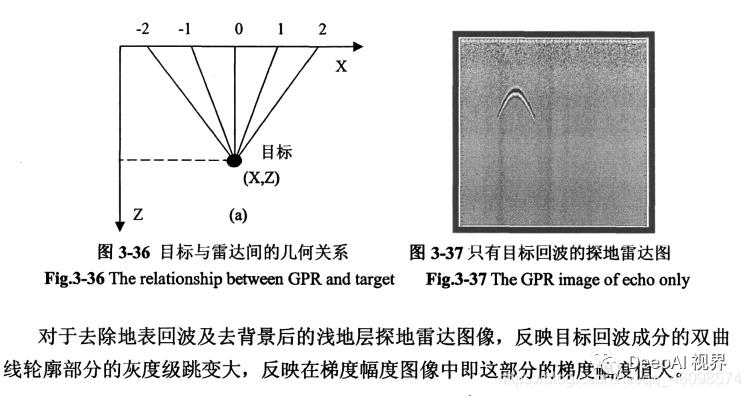
与各种普通图像一样,探地雷达图像边缘是由灰度级跳变构成的。在探测可疑物尤其是非金属这类目标时,地表回波通常是最强的成分。因此探地雷达图像中的地表回波部分的灰度级跳变大,反映在梯度幅度图像中即这部分的梯度幅度值大。此外对于地表回波成分来说,它们在B.sc锄数据所形成的矩阵中都分布在邻近的一些行上,即地表回波分布范围内的每行,在梯度幅度图像中的梯度幅度值都相对较大。
(2)目标回波在浅地层探地雷达图像中的特点
浅地层埋地目标在探地雷达B—scaIl数据所形成的图像中将呈双曲线状,这部分给一个几何的解释。雷达在地面沿同一个水平方向移动就得到一个二维的雷达图像,垂直轴和水平轴分别指示目标的水平位置和目标深度,图3.36为目标和雷达之间的简单几何关系示意图
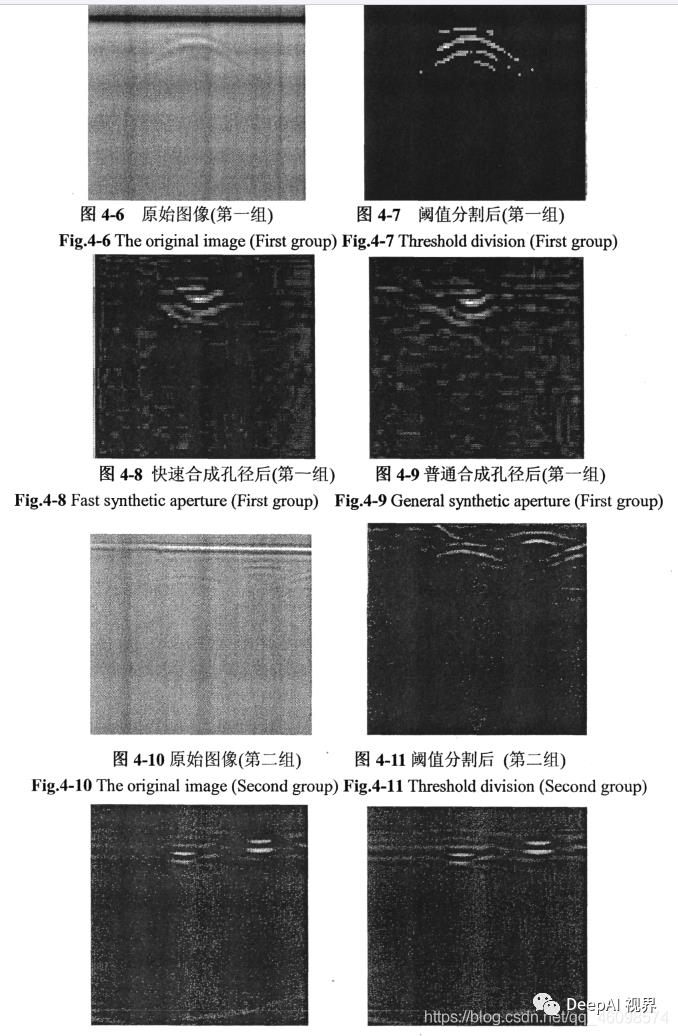
探地雷达合成孔径成像
合成孔径成像是探地雷达信号处理中一个非常重要的方面,其目的是要提高探地雷达图像的分辨力。在经合成孔径成像处理后的浅地层探地雷达图像中,反映目标的双曲线得到了聚焦,其更接近于目标的真实尺寸及目标的实际埋地位置。探地雷达合成孔径成像是近年探地雷达研究领域的一个热点之一。提到合成孔径成像,肯定会想到各种普通雷达中所使用的合成孔径成像方法(如机载sAR,星载SAR中的RaJlge.Doppler算法,clli】p.scaling算法等),但是这些方法对于浅地层探地雷达来说并不适用。普通雷达合成孔径成像与浅地层探地雷达合成孔
径成像之间有很多不同之处,下面简要的介绍一些方面:
(1)浅地层探地雷达中的目标常常处于近场,而普通合成孔径雷达中的目标常常处于远场。
(2)普通合成孔径雷达中的一些假设对浅地层探地雷达并不成立,如雷达位置的变化远小于雷达到目标的距离这个假设对浅地层探地雷达就不成立,因为浅地层探地雷达与目标的距离一般只有几厘米到几十厘米,而雷达相邻两个位置间的距离通常都在厘米量级。
(3)机载雷达、星载雷达总是在一定的运动速度中采集数据,+合成孔径成像时总会有雷达运动速度这个参数;而浅地层探地雷达合成孔径成像时没有雷达运动速度这个参数,但有两个采样点之间的间隔距离这个参数。
(4)普通合成孔径雷达中由于电磁波通常只在空气中传播,所以电磁波波速通常取一恒定值(即光速):探地雷达由于电磁波要在地下介质中传播,因此电磁波波速这个参数是随介质的变化而变化的。
(5)在普通合成孔径雷达中,距离徙动校正是成像的一个关键问题,通过徙动校正去除信号空间的藕合,可将二维处理分离成两个一维处理的级联,从而大大地减少成像处理的运算量;但这一步对浅地层探地雷达合成孔径成像来说是不需的。探地雷达有其自身的特点,在探地雷达中常用的合成孔径成像方法有
本章在研究基于微波全息成像的合成孔径成像方法时,改进了一种快速实现方法,
即:基于杂波抑制和窗口划分的基础上提出的快速合成孔径成像实现方法
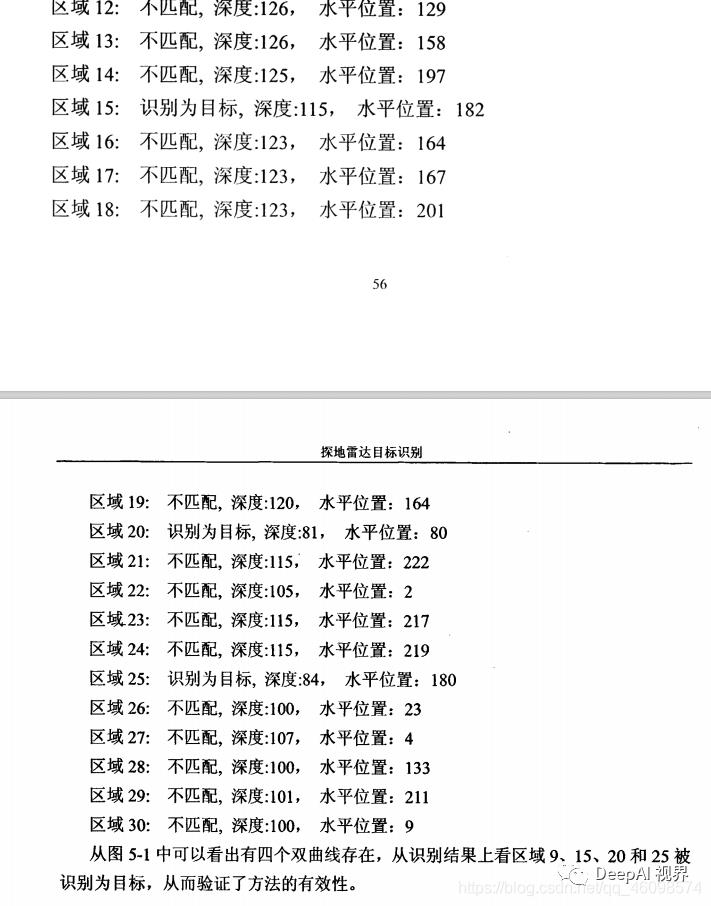
探地雷达目标识别

总结
本文主要研究了浅地层探地雷达中的杂波抑制,合成孔径成像,自动目标识别与定位等方面。本文的主要工作可以归纳如下:
(1)概述了探地雷达的研究背景与意义,及国内外探地雷达的研究概况。
(2)介绍了电磁波在土壤中的传播,探地雷达的基本原理与体制,以及探地雷达系统方面的知识。
(3)讨论了各种探地雷达杂波抑制方法,数字图像的基本理论和图像倾斜矫正方法,重点介绍了均值法去背景这种最常用的杂波抑制方法,分析了图像的分割技术、滤波技术以及腐蚀与膨胀技术。从浅地层探地雷达图像的特点出发,提出了一种基于
图像处理技术抑制探地雷达杂波的方法。
(4)分析了浅地层探地雷达合成孔径成像与普通雷达合成孔径成像的不同。研究了探地雷达合成孔径成像时的一个重要参数一波速的估计问题,使用了一种基于Hou幽变换的波速估计方法。在各种探地雷达合成孔径成像方法中,改进了一种快速微波全息合成孔径成像方法。
(5)介绍了针对B.scan的探地雷达目标识别与定位方法,在前述所提杂波抑制的基础上运用并实现了了一种有效的特征提取和自动识别方法,并实现了一种基于窗口划分的目标定位方法;
我个人认为,这篇2008年的文章,条理十分清晰,是当时绝对的大佬,对图像处理比较熟悉,能够合适的运用于探测雷达与信号识别上,是当时十分前沿的科技;
如果是当今,我们可以基于此文做许多优化:
探地雷达是一个非常复杂的系统,对其的研究远不及对探空雷达的研究成熟,尤其对浅地层探地雷达来说,由于目标所处环境复杂,雷达通常为超宽带,使其对各方面的要求都非常高。因此除了作者本文研究的一些领域外,还有很多方面值得进一步研究,如以下列举的几个方面。
(1)寻找好的特征数据用于目标识别。本文所用特征数据只是部分满足以下四个条件:时移不变性、时问尺度不变性、对多次反射不敏感、对噪声不敏感。如果能找到完全满足上述四个条件,同时又不增加数据量的特征数据,将会对提高识别率有很大的帮助.
(2)数据融合研究。在探测地雷所用的工具中,除了探地雷达外,还有金属探测器,红外传感器等,将各种传感器的数据融合在一起进行研究,将会有助于提高目标检测及目标识别能力。
(3)对地下目标360度可视的三维成像及其分析与解释,也是下一步值得研究的方向。
除此之外,文章中,在数据预处理中,其实可以将他文章中说到的膨胀腐蚀与滤波算法以及阈值分割算法加到其最终的算法中,做预处理部分;
最后,当前可以使用深度学习目标检测算法做处理,当然,也依旧可以使用刚刚介绍的数据预处理方法,提高目标检测的mAP;
以上是关于军工AI基于图像处理与图像识别的经典探地雷达识别的主要内容,如果未能解决你的问题,请参考以下文章
vivo与百度识图联手:旗舰新机 vivo NEX内置AI图像识别能力