一行一行源码分析清楚 AbstractQueuedSynchronizer
Posted 猿灯塔
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了一行一行源码分析清楚 AbstractQueuedSynchronizer 相关的知识,希望对你有一定的参考价值。
“365篇原创计划”第二十五篇。
今天呢!灯塔君跟大家讲:
一行一行源码分析清楚
AbstractQueuedSynchronizer (二)
本文关注以下几点内容:
深入理解 ReentrantLock 公平锁和非公平锁的区别
深入分析 AbstractQueuedSynchronizer 中的 ConditionObject
深入理解 Java 线程中断和 InterruptedException 异常
基本上本文把以上几点都说清楚了,我假设读者看过上一篇文章中对 AbstractQueuedSynchronizer 的介绍 ,当然如果你已经熟悉 AQS 中的独占锁了,那也可以直接看这篇。各小节之间基本上没什么关系,大家可以只关注自己感兴趣的部分。
其实这篇文章的信息量很大,初学者估计至少要 1 小时才能看完,
公平锁和非公平锁
ReentrantLock 默认采用非公平锁,除非你在构造方法中传入参数 true 。
public ReentrantLock() {
// 默认非公平锁
sync = new NonfairSync();
}
public ReentrantLock(boolean fair) {
sync = fair ? new FairSync() : new NonfairSync();
}
公平锁的 lock 方法:
static final class FairSync extends Sync {
final void lock() {
acquire(1);
}
// AbstractQueuedSynchronizer.acquire(int arg)
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
protected final boolean tryAcquire(int acquires) {
final Thread current = Thread.currentThread();
int c = getState();
if (c == 0) {
// 1. 和非公平锁相比,这里多了一个判断:是否有线程在等待
if (!hasQueuedPredecessors() &&
compareAndSetState(0, acquires)) {
setExclusiveOwnerThread(current);
return true;
}
}
else if (current == getExclusiveOwnerThread()) {
int nextc = c + acquires;
if (nextc < 0)
throw new Error("Maximum lock count exceeded");
setState(nextc);
return true;
}
return false;
}
}
总结:公平锁和非公平锁只有两处不同:
非公平锁在调用 lock 后,首先就会调用 CAS 进行一次抢锁,如果这个时候恰巧锁没有被占用,那么直接就获取到锁返回了。
非公平锁在 CAS 失败后,和公平锁一样都会进入到 tryAcquire 方法,在 tryAcquire 方法中,如果发现锁这个时候被释放了(state == 0),非公平锁会直接 CAS 抢锁,但是公平锁会判断等待队列是否有线程处于等待状态,如果有则不去抢锁,乖乖排到后面。
公平锁和非公平锁就这两点区别,如果这两次 CAS 都不成功,那么后面非公平锁和公平锁是一样的,都要进入到阻塞队列等待唤醒。
相对来说,非公平锁会有更好的性能,因为它的吞吐量比较大。当然,非公平锁让获取锁的时间变得更加不确定,可能会导致在阻塞队列中的线程长期处于饥饿状态。
Condition
Tips: 这里重申一下,要看懂这个,必须要先看懂上一篇关于 AbstractQueuedSynchronizer 的介绍,或者你已经有相关的知识了,否则这节肯定是看不懂的。
我们先来看看 Condition 的使用场景,Condition 经常可以用在生产者-消费者的场景中,请看 Doug Lea 给出的这个例子:
import java.util.concurrent.locks.Condition;
import java.util.concurrent.locks.Lock;
import java.util.concurrent.locks.ReentrantLock;
class BoundedBuffer {
final Lock lock = new ReentrantLock();
// condition 依赖于 lock 来产生
final Condition notFull = lock.newCondition();
final Condition notEmpty = lock.newCondition();
final Object[] items = new Object[100];
int putptr, takeptr, count;
// 生产
public void put(Object x) throws InterruptedException {
lock.lock();
try {
while (count == items.length)
notFull.await(); // 队列已满,等待,直到 not full 才能继续生产
items[putptr] = x;
if (++putptr == items.length) putptr = 0;
++count;
notEmpty.signal(); // 生产成功,队列已经 not empty 了,发个通知出去
} finally {
lock.unlock();
}
}
// 消费
public Object take() throws InterruptedException {
lock.lock();
try {
while (count == 0)
notEmpty.await(); // 队列为空,等待,直到队列 not empty,才能继续消费
Object x = items[takeptr];
if (++takeptr == items.length) takeptr = 0;
--count;
notFull.signal(); // 被我消费掉一个,队列 not full 了,发个通知出去
return x;
} finally {
lock.unlock();
}
}
}
1、我们可以看到,在使用 condition 时,必须先持有相应的锁。这个和 Object 类中的方法有相似的语义,需要先持有某个对象的监视器锁才可以执行 wait(), notify() 或 notifyAll() 方法。
2、ArrayBlockingQueue 采用这种方式实现了生产者-消费者,所以请只把这个例子当做学习例子,实际生产中可以直接使用 ArrayBlockingQueue
我们常用 obj.wait(),obj.notify() 或 obj.notifyAll() 来实现相似的功能,但是,它们是基于对象的监视器锁的。需要深入了解这几个方法的读者,可以关注我下次给大家带来《深入分析 java 8 编程语言规范:Threads and Locks》。而这里说的 Condition 是基于 ReentrantLock 实现的,而 ReentrantLock 是依赖于 AbstractQueuedSynchronizer 实现的。
在往下看之前,读者心里要有一个整体的概念。condition 是依赖于 ReentrantLock 的,不管是调用 await 进入等待还是 signal 唤醒,都必须获取到锁才能进行操作。
final ConditionObject newCondition() {
// 实例化一个 ConditionObject
return new ConditionObject();
}
AbstractQueuedSynchronizer
类中的
ConditionObject
。
public class ConditionObject implements Condition, java.io.Serializable {
private static final long serialVersionUID = 1173984872572414699L;
// 条件队列的第一个节点
// 不要管这里的关键字 transient,是不参与序列化的意思
private transient Node firstWaiter;
// 条件队列的最后一个节点
private transient Node lastWaiter;
......
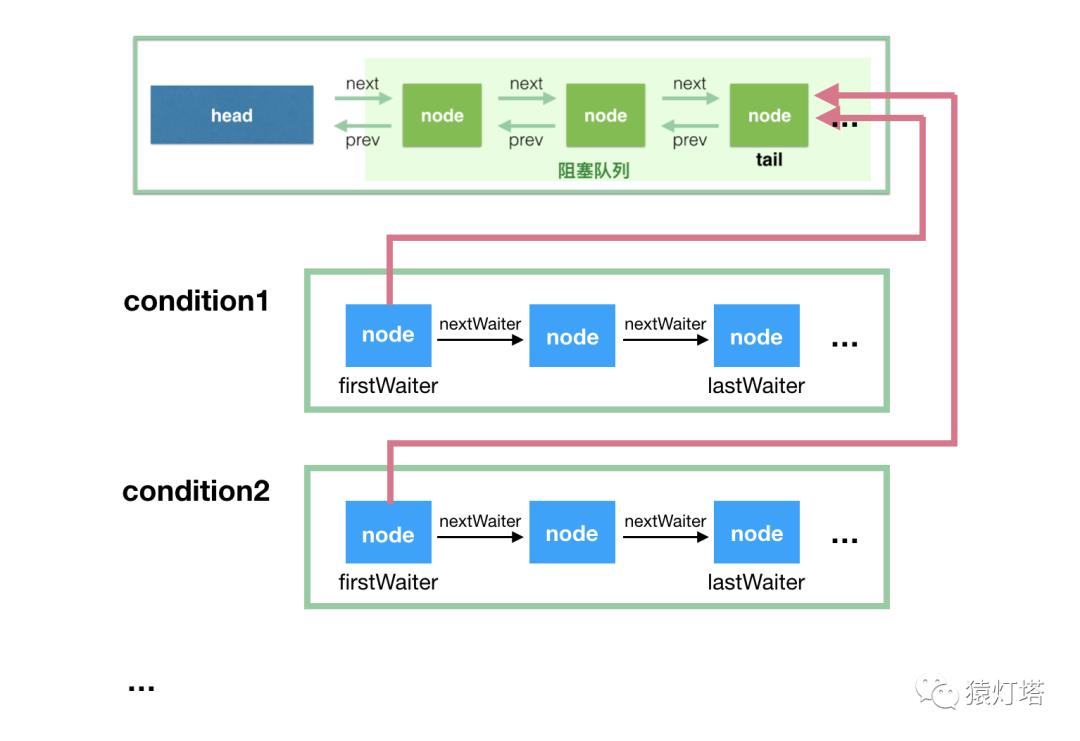
在上一篇介绍 AQS 的时候,我们有一个阻塞队列,用于保存等待获取锁的线程的队列。这里我们引入另一个概念,叫条件队列(condition queue),我画了一张简单的图用来说明这个。
这里的阻塞队列如果叫做同步队列(sync queue)其实比较贴切,不过为了和前篇呼应,我就继续使用阻塞队列了。记住这里的两个概念,阻塞队列和条件队列。
这里,我们简单回顾下 Node 的属性:
volatile int waitStatus; // 可取值 0、CANCELLED(1)、SIGNAL(-1)、CONDITION(-2)、PROPAGATE(-3)
volatile Node prev;
volatile Node next;
volatile Thread thread;
Node nextWaiter;prev 和 next 用于实现阻塞队列的双向链表,这里的 nextWaiter 用于实现条件队列的单向链表
基本上,把这张图看懂,你也就知道 condition 的处理流程了。所以,我先简单解释下这图,然后再具体地解释代码实现。
条件队列和阻塞队列的节点,都是 Node 的实例,因为条件队列的节点是需要转移到阻塞队列中去的;
我们知道一个 ReentrantLock 实例可以通过多次调用 newCondition() 来产生多个 Condition 实例,这里对应 condition1 和 condition2。注意,ConditionObject 只有两个属性 firstWaiter 和 lastWaiter;
每个 condition 有一个关联的条件队列,如线程 1 调用
condition1.await()方法即可将当前线程 1 包装成 Node 后加入到条件队列中,然后阻塞在这里,不继续往下执行,条件队列是一个单向链表;调用
condition1.signal()触发一次唤醒,此时唤醒的是队头,会将condition1 对应的条件队列的 firstWaiter(队头) 移到阻塞队列的队尾,等待获取锁,获取锁后 await 方法才能返回,继续往下执行。
上面的 2->3->4 描述了一个最简单的流程,没有考虑中断、signalAll、还有带有超时参数的 await 方法等,不过把这里弄懂是这节的主要目的。
同时,从图中也可以很直观地看出,哪些操作是线程安全的,哪些操作是线程不安全的。
这个图看懂后,下面的代码分析就简单了。
// 首先,这个方法是可被中断的,不可被中断的是另一个方法 awaitUninterruptibly()
// 这个方法会阻塞,直到调用 signal 方法(指 signal() 和 signalAll(),下同),或被中断
public final void await() throws InterruptedException {
// 老规矩,既然该方法要响应中断,那么在最开始就判断中断状态
if (Thread.interrupted())
throw new InterruptedException();
// 添加到 condition 的条件队列中
Node node = addConditionWaiter();
// 释放锁,返回值是释放锁之前的 state 值
// await() 之前,当前线程是必须持有锁的,这里肯定要释放掉
int savedState = fullyRelease(node);
int interruptMode = 0;
// 这里退出循环有两种情况,之后再仔细分析
// 1. isOnSyncQueue(node) 返回 true,即当前 node 已经转移到阻塞队列了
// 2. checkInterruptWhileWaiting(node) != 0 会到 break,然后退出循环,代表的是线程中断
while (!isOnSyncQueue(node)) {
LockSupport.park(this);
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0)
break;
}
// 被唤醒后,将进入阻塞队列,等待获取锁
if (acquireQueued(node, savedState) && interruptMode != THROW_IE)
interruptMode = REINTERRUPT;
if (node.nextWaiter != null) // clean up if cancelled
unlinkCancelledWaiters();
if (interruptMode != 0)
reportInterruptAfterWait(interruptMode);
}
1. 将节点加入到条件队列
addConditionWaiter() 是将当前节点加入到条件队列,看图我们知道,这种条件队列内的操作是线程安全的。
// 将当前线程对应的节点入队,插入队尾
private Node addConditionWaiter() {
Node t = lastWaiter;
// 如果条件队列的最后一个节点取消了,将其清除出去
// 为什么这里把 waitStatus 不等于 Node.CONDITION,就判定为该节点发生了取消排队?
if (t != null && t.waitStatus != Node.CONDITION) {
// 这个方法会遍历整个条件队列,然后会将已取消的所有节点清除出队列
unlinkCancelledWaiters();
t = lastWaiter;
}
// node 在初始化的时候,指定 waitStatus 为 Node.CONDITION
Node node = new Node(Thread.currentThread(), Node.CONDITION);
// t 此时是 lastWaiter,队尾
// 如果队列为空
if (t == null)
firstWaiter = node;
else
t.nextWaiter = node;
lastWaiter = node;
return node;
}
在addWaiter 方法中,有一个 unlinkCancelledWaiters() 方法,该方法用于清除队列中已经取消等待的节点。
// 等待队列是一个单向链表,遍历链表将已经取消等待的节点清除出去
// 纯属链表操作,很好理解,看不懂多看几遍就可以了
private void unlinkCancelledWaiters() {
Node t = firstWaiter;
Node trail = null;
while (t != null) {
Node next = t.nextWaiter;
// 如果节点的状态不是 Node.CONDITION 的话,这个节点就是被取消的
if (t.waitStatus != Node.CONDITION) {
t.nextWaiter = null;
if (trail == null)
firstWaiter = next;
else
trail.nextWaiter = next;
if (next == null)
lastWaiter = trail;
}
else
trail = t;
t = next;
}
}
回到 wait 方法,节点入队了以后,会调用 int savedState = fullyRelease(node); 方法释放锁,注意,这里是完全释放独占锁(fully release),因为 ReentrantLock 是可以重入的。
考虑一下这里的 savedState。如果在 condition1.await() 之前,假设线程先执行了 2 次 lock() 操作,那么 state 为 2,我们理解为该线程持有 2 把锁,这里 await() 方法必须将 state 设置为 0,然后再进入挂起状态,这样其他线程才能持有锁。当它被唤醒的时候,它需要重新持有 2 把锁,才能继续下去。
3. 等待进入阻塞队列
int interruptMode = 0;
// 如果不在阻塞队列中,注意了,是阻塞队列
while (!isOnSyncQueue(node)) {
// 线程挂起
LockSupport.park(this);
// 这里可以先不用看了,等看到它什么时候被 unpark 再说
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0)
break;
}
// 在节点入条件队列的时候,初始化时设置了 waitStatus = Node.CONDITION
// 前面我提到,signal 的时候需要将节点从条件队列移到阻塞队列,
// 这个方法就是判断 node 是否已经移动到阻塞队列了
final boolean isOnSyncQueue(Node node) {
// 移动过去的时候,node 的 waitStatus 会置为 0,这个之后在说 signal 方法的时候会说到
// 如果 waitStatus 还是 Node.CONDITION,也就是 -2,那肯定就是还在条件队列中
// 如果 node 的前驱 prev 指向还是 null,说明肯定没有在 阻塞队列(prev是阻塞队列链表中使用的)
if (node.waitStatus == Node.CONDITION || node.prev == null)
return false;
// 如果 node 已经有后继节点 next 的时候,那肯定是在阻塞队列了
if (node.next != null)
return true;
// 下面这个方法从阻塞队列的队尾开始从后往前遍历找,如果找到相等的,说明在阻塞队列,否则就是不在阻塞队列
// 可以通过判断 node.prev() != null 来推断出 node 在阻塞队列吗?答案是:不能。
// 这个可以看上篇 AQS 的入队方法,首先设置的是 node.prev 指向 tail,
// 然后是 CAS 操作将自己设置为新的 tail,可是这次的 CAS 是可能失败的。
return findNodeFromTail(node);
}
// 从阻塞队列的队尾往前遍历,如果找到,返回 true
private boolean findNodeFromTail(Node node) {
Node t = tail;
for (;;) {
if (t == node)
return true;
if (t == null)
return false;
t = t.prev;
}
}
LockSupport.park(this);
这里线程挂起。
4. signal 唤醒线程,转移到阻塞队列
为了大家理解,这里我们先看唤醒操作,因为刚刚到 LockSupport.park(this); 把线程挂起了,等待唤醒。
唤醒操作通常由另一个线程来操作,就像生产者-消费者模式中,如果线程因为等待消费而挂起,那么当生产者生产了一个东西后,会调用 signal 唤醒正在等待的线程来消费。
// 唤醒等待了最久的线程
// 其实就是,将这个线程对应的 node 从条件队列转移到阻塞队列
public final void signal() {
// 调用 signal 方法的线程必须持有当前的独占锁
if (!isHeldExclusively())
throw new IllegalMonitorStateException();
Node first = firstWaiter;
if (first != null)
doSignal(first);
}
// 从条件队列队头往后遍历,找出第一个需要转移的 node
// 因为前面我们说过,有些线程会取消排队,但是可能还在队列中
private void doSignal(Node first) {
do {
// 将 firstWaiter 指向 first 节点后面的第一个,因为 first 节点马上要离开了
// 如果将 first 移除后,后面没有节点在等待了,那么需要将 lastWaiter 置为 null
if ( (firstWaiter = first.nextWaiter) == null)
lastWaiter = null;
// 因为 first 马上要被移到阻塞队列了,和条件队列的链接关系在这里断掉
first.nextWaiter = null;
} while (!transferForSignal(first) &&
(first = firstWaiter) != null);
// 这里 while 循环,如果 first 转移不成功,那么选择 first 后面的第一个节点进行转移,依此类推
}
// 将节点从条件队列转移到阻塞队列
// true 代表成功转移
// false 代表在 signal 之前,节点已经取消了
final boolean transferForSignal(Node node) {
// CAS 如果失败,说明此 node 的 waitStatus 已不是 Node.CONDITION,说明节点已经取消,
// 既然已经取消,也就不需要转移了,方法返回,转移后面一个节点
// 否则,将 waitStatus 置为 0
if (!compareAndSetWaitStatus(node, Node.CONDITION, 0))
return false;
// enq(node): 自旋进入阻塞队列的队尾
// 注意,这里的返回值 p 是 node 在阻塞队列的前驱节点
Node p = enq(node);
int ws = p.waitStatus;
// ws > 0 说明 node 在阻塞队列中的前驱节点取消了等待锁,直接唤醒 node 对应的线程。唤醒之后会怎么样,后面再解释
// 如果 ws <= 0, 那么 compareAndSetWaitStatus 将会被调用,上篇介绍的时候说过,节点入队后,需要把前驱节点的状态设为 Node.SIGNAL(-1)
if (ws > 0 || !compareAndSetWaitStatus(p, ws, Node.SIGNAL))
// 如果前驱节点取消或者 CAS 失败,会进到这里唤醒线程,之后的操作看下一节
LockSupport.unpark(node.thread);
return true;
}
正常情况下,ws > 0 || !compareAndSetWaitStatus(p, ws, Node.SIGNAL) 这句中,ws <= 0,而且 compareAndSetWaitStatus(p, ws, Node.SIGNAL) 会返回 true,所以一般也不会进去 if 语句块中唤醒 node 对应的线程。然后这个方法返回 true,也就意味着 signal 方法结束了,节点进入了阻塞队列。
假设发生了阻塞队列中的前驱节点取消等待,或者 CAS 失败,只要唤醒线程,让其进到下一步即可。
5. 唤醒后检查中断状态
上一步 signal 之后,我们的线程由条件队列转移到了阻塞队列,之后就准备获取锁了。只要重新获取到锁了以后,继续往下执行。
int interruptMode = 0;
while (!isOnSyncQueue(node)) {
// 线程挂起
LockSupport.park(this);
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0)
break;
}
REINTERRUPT:代表 await 返回的时候,需要重新设置中断状态
THROW_IE:代表 await 返回的时候,需要抛出 InterruptedException 异常
0 :说明在 await 期间,没有发生中断
有以下三种情况会让 LockSupport.park(this); 这句返回继续往下执行:
常规路径。signal -> 转移节点到阻塞队列 -> 获取了锁(unpark)
线程中断。在 park 的时候,另外一个线程对这个线程进行了中断
signal 的时候我们说过,转移以后的前驱节点取消了,或者对前驱节点的CAS操作失败了
假唤醒。这个也是存在的,和 Object.wait() 类似,都有这个问题
// 1. 如果在 signal 之前已经中断,返回 THROW_IE
// 2. 如果是 signal 之后中断,返回 REINTERRUPT
// 3. 没有发生中断,返回 0
private int checkInterruptWhileWaiting(Node node) {
return Thread.interrupted() ?
(transferAfterCancelledWait(node) ? THROW_IE : REINTERRUPT) :
0;
}
Thread.interrupted():如果当前线程已经处于中断状态,那么该方法返回 true,同时将中断状态重置为 false,所以,才有后续的
重新中断(REINTERRUPT)的使用。
// 只有线程处于中断状态,才会调用此方法
// 如果需要的话,将这个已经取消等待的节点转移到阻塞队列
// 返回 true:如果此线程在 signal 之前被取消,
final boolean transferAfterCancelledWait(Node node) {
// 用 CAS 将节点状态设置为 0
// 如果这步 CAS 成功,说明是 signal 方法之前发生的中断,因为如果 signal 先发生的话,signal 中会将 waitStatus 设置为 0
if (compareAndSetWaitStatus(node, Node.CONDITION, 0)) {
// 将节点放入阻塞队列
// 这里我们看到,即使中断了,依然会转移到阻塞队列
enq(node);
return true;
}
// 到这里是因为 CAS 失败,肯定是因为 signal 方法已经将 waitStatus 设置为了 0
// signal 方法会将节点转移到阻塞队列,但是可能还没完成,这边自旋等待其完成
// 当然,这种事情还是比较少的吧:signal 调用之后,没完成转移之前,发生了中断
while (!isOnSyncQueue(node))
Thread.yield();
return false;
}这里说一遍,即使发生了中断,节点依然会转移到阻塞队列。
到这里,大家应该都知道这个 while 循环怎么退出了吧。要么中断,要么转移成功。
这里描绘了一个场景,本来有个线程,它是排在条件队列的后面的,但是因为它被中断了,那么它会被唤醒,然后它发现自己不是被 signal 的那个,但是它会自己主动去进入到阻塞队列。
6. 获取独占锁
if (acquireQueued(node, savedState) && interruptMode != THROW_IE)
interruptMode = REINTERRUPT;
由于 while 出来后,我们确定节点已经进入了阻塞队列,准备获取锁。
这里的 acquireQueued(node, savedState) 的第一个参数 node 之前已经经过 enq(node) 进入了队列,参数 savedState 是之前释放锁前的 state,这个方法返回的时候,代表当前线程获取了锁,而且 state == savedState了。
注意,前面我们说过,不管有没有发生中断,都会进入到阻塞队列,而 acquireQueued(node, savedState) 的返回值就是代表线程是否被中断。如果返回 true,说明被中断了,而且 interruptMode != THROW_IE,说明在 signal 之前就发生中断了,这里将 interruptMode 设置为 REINTERRUPT,用于待会重新中断。
if (node.nextWaiter != null) // clean up if cancelled
unlinkCancelledWaiters();
if (interruptMode != 0)
reportInterruptAfterWait(interruptMode);
node.nextWaiter != null
怎么满足。我前面也说了 signal 的时候会将节点转移到阻塞队列,有一步是 node.nextWaiter = null,将断开节点和条件队列的联系。
可是,在判断发生中断的情况下,是 signal 之前还是之后发生的? 这部分的时候,我也介绍了,如果 signal 之前就中断了,也需要将节点进行转移到阻塞队列,这部分转移的时候,是没有设置 node.nextWaiter = null 的。
之前我们说过,如果有节点取消,也会调用 unlinkCancelledWaiters 这个方法,就是这里了。
7. 处理中断状态
到这里,我们终于可以好好说下这个 interruptMode 干嘛用了。
0:什么都不做,没有被中断过;
THROW_IE:await 方法抛出 InterruptedException 异常,因为它代表在 await() 期间发生了中断;
REINTERRUPT:重新中断当前线程,因为它代表 await() 期间没有被中断,而是 signal() 以后发生的中断
private void reportInterruptAfterWait(int interruptMode)
throws InterruptedException {
if (interruptMode == THROW_IE)
throw new InterruptedException();
else if (interruptMode == REINTERRUPT)
selfInterrupt();
}
这个中断状态这部分内容,大家应该都理解了吧,不理解的话,多看几遍就是了。
* 带超时机制的 await
经过前面的 7 步,整个 ConditionObject 类基本上都分析完了,接下来简单分析下带超时机制的 await 方法。
public final long awaitNanos(long nanosTimeout)
throws InterruptedException
public final boolean awaitUntil(Date deadline)
throws InterruptedException
public final boolean await(long time, TimeUnit unit)
throws InterruptedException这三个方法都差不多,我们就挑一个出来看看吧:
public final boolean await(long time, TimeUnit unit)
throws InterruptedException {
// 等待这么多纳秒
long nanosTimeout = unit.toNanos(time);
if (Thread.interrupted())
throw new InterruptedException();
Node node = addConditionWaiter();
int savedState = fullyRelease(node);
// 当前时间 + 等待时长 = 过期时间
final long deadline = System.nanoTime() + nanosTimeout;
// 用于返回 await 是否超时
boolean timedout = false;
int interruptMode = 0;
while (!isOnSyncQueue(node)) {
// 时间到啦
if (nanosTimeout <= 0L) {
// 这里因为要 break 取消等待了。取消等待的话一定要调用 transferAfterCancelledWait(node) 这个方法
// 如果这个方法返回 true,在这个方法内,将节点转移到阻塞队列成功
// 返回 false 的话,说明 signal 已经发生,signal 方法将节点转移了。也就是说没有超时嘛
timedout = transferAfterCancelledWait(node);
break;
}
// spinForTimeoutThreshold 的值是 1000 纳秒,也就是 1 毫秒
// 也就是说,如果不到 1 毫秒了,那就不要选择 parkNanos 了,自旋的性能反而更好
if (nanosTimeout >= spinForTimeoutThreshold)
LockSupport.parkNanos(this, nanosTimeout);
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0)
break;
// 得到剩余时间
nanosTimeout = deadline - System.nanoTime();
}
if (acquireQueued(node, savedState) && interruptMode != THROW_IE)
interruptMode = REINTERRUPT;
if (node.nextWaiter != null)
unlinkCancelledWaiters();
if (interruptMode != 0)
reportInterruptAfterWait(interruptMode);
return !timedout;
}
超时的思路还是很简单的,不带超时参数的 await 是 park,然后等待别人唤醒。而现在就是调用 parkNanos 方法来休眠指定的时间,醒来后判断是否 signal 调用了,调用了就是没有超时,否则就是超时了。超时的话,自己来进行转移到阻塞队列,然后抢锁。
* 不抛出 InterruptedException 的 await
public final void awaitUninterruptibly() {
Node node = addConditionWaiter();
int savedState = fullyRelease(node);
boolean interrupted = false;
while (!isOnSyncQueue(node)) {
LockSupport.park(this);
if (Thread.interrupted())
interrupted = true;
}
if (acquireQueued(node, savedState) || interrupted)
selfInterrupt();
}
AbstractQueuedSynchronizer 独占锁的取消排队
这篇文章说的是 AbstractQueuedSynchronizer,只不过好像 Condition 说太多了,赶紧把思路拉回来。
接下来,我想说说怎么取消对锁的竞争?
上篇文章提到过,最重要的方法是这个,我们要在这里面找答案:
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return interrupted;
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
如果我们要取消一个线程的排队,我们需要在另外一个线程中对其进行中断。比如某线程调用 lock() 老久不返回,我想中断它。一旦对其进行中断,此线程会从 LockSupport.park(this); 中唤醒,然后 Thread.interrupted(); 返回 true。
我们发现一个问题,即使是中断唤醒了这个线程,也就只是设置了 interrupted = true 然后继续下一次循环。而且,由于 Thread.interrupted(); 会清除中断状态,第二次进 parkAndCheckInterrupt 的时候,返回会是 false。
所以,我们要看到,在这个方法中,interrupted 只是用来记录是否发生了中断,然后用于方法返回值,其他没有做任何相关事情。
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
static void selfInterrupt() {
Thread.currentThread().interrupt();
}
我们来看 ReentrantLock 的另一个 lock 方法:
public void lockInterruptibly() throws InterruptedException {
sync.acquireInterruptibly(1);
}
方法上多了个 throws InterruptedException ,经过前面那么多知识的铺垫,这里我就不再啰里啰嗦了。
public final void acquireInterruptibly(int arg)
throws InterruptedException {
if (Thread.interrupted())
throw new InterruptedException();
if (!tryAcquire(arg))
doAcquireInterruptibly(arg);
}继续:
private void doAcquireInterruptibly(int arg) throws InterruptedException {
final Node node = addWaiter(Node.EXCLUSIVE);
boolean failed = true;
try {
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return;
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
// 就是这里了,一旦异常,马上结束这个方法,抛出异常。
// 这里不再只是标记这个方法的返回值代表中断状态
// 而是直接抛出异常,而且外层也不捕获,一直往外抛到 lockInterruptibly
throw new InterruptedException();
}
} finally {
// 如果通过 InterruptedException 异常出去,那么 failed 就是 true 了
if (failed)
cancelAcquire(node);
}
}
既然到这里了,顺便说说 cancelAcquire 这个方法吧:
private void cancelAcquire(Node node) {
// Ignore if node doesn't exist
if (node == null)
return;
node.thread = null;
// Skip cancelled predecessors
// 找一个合适的前驱。其实就是将它前面的队列中已经取消的节点都”请出去“
Node pred = node.prev;
while (pred.waitStatus > 0)
node.prev = pred = pred.prev;
// predNext is the apparent node to unsplice. CASes below will
// fail if not, in which case, we lost race vs another cancel
// or signal, so no further action is necessary.
Node predNext = pred.next;
// Can use unconditional write instead of CAS here.
// After this atomic step, other Nodes can skip past us.
// Before, we are free of interference from other threads.
node.waitStatus = Node.CANCELLED;
// If we are the tail, remove ourselves.
if (node == tail && compareAndSetTail(node, pred)) {
compareAndSetNext(pred, predNext, null);
} else {
// If successor needs signal, try to set pred's next-link
// so it will get one. Otherwise wake it up to propagate.
int ws;
if (pred != head &&
((ws = pred.waitStatus) == Node.SIGNAL ||
(ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) &&
pred.thread != null) {
Node next = node.next;
if (next != null && next.waitStatus <= 0)
compareAndSetNext(pred, predNext, next);
} else {
unparkSuccessor(node);
}
node.next = node; // help GC
}
}
再说 java 线程中断和 InterruptedException 异常
在之前的文章中,我们接触了大量的中断,这边算是个总结吧。如果你完全熟悉中断了,没有必要再看这节,本节为新手而写。
线程中断
首先,我们要明白,中断不是类似 linux 里面的命令 kill -9 pid,不是说我们中断某个线程,这个线程就停止运行了。中断代表线程状态,每个线程都关联了一个中断状态,是一个 true 或 false 的 boolean 值,初始值为 false。
Java 中的中断和操作系统的中断还不一样,这里就按照状态来理解吧,不要和操作系统的中断联系在一起
// Thread 类中的实例方法,持有线程实例引用即可检测线程中断状态
public boolean isInterrupted() {}
// Thread 中的静态方法,检测调用这个方法的线程是否已经中断
// 注意:这个方法返回中断状态的同时,会将此线程的中断状态重置为 false
// 所以,如果我们连续调用两次这个方法的话,第二次的返回值肯定就是 false 了
public static boolean interrupted() {}
// Thread 类中的实例方法,用于设置一个线程的中断状态为 true
public void interrupt() {}
while (!Thread.interrupted()) {
doWork();
System.out.println("我做完一件事了,准备做下一件,如果没有其他线程中断我的话");
}
这种代码就是会响应中断的,它会在干活的时候先判断下中断状态,不过,除了 JDK 源码外,其他用中断的场景还是比较少的,毕竟 JDK 源码非常讲究。
当然,中断除了是线程状态外,还有其他含义,否则也不需要专门搞一个这个概念出来了。
如果线程处于以下三种情况,那么当线程被中断的时候,能自动感知到:
来自 Object 类的 wait()、wait(long)、wait(long, int),
来自 Thread 类的 join()、join(long)、join(long, int)、sleep(long)、sleep(long, int)
这几个方法的相同之处是,方法上都有: throws InterruptedException
如果线程阻塞在这些方法上(我们知道,这些方法会让当前线程阻塞),这个时候如果其他线程对这个线程进行了中断,那么这个线程会从这些方法中立即返回,抛出 InterruptedException 异常,同时重置中断状态为 false。
实现了 InterruptibleChannel 接口的类中的一些 I/O 阻塞操作,如 DatagramChannel 中的 connect 方法和 receive 方法等
如果线程阻塞在这里,中断线程会导致这些方法抛出 ClosedByInterruptException 并重置中断状态。
Selector 中的 select 方法,参考下我写的 NIO 的文章
一旦中断,方法立即返回
对于以上 3 种情况是最特殊的,因为他们能自动感知到中断(这里说自动,当然也是基于底层实现),并且在做出相应的操作后都会重置中断状态为 false。
InterruptedException 概述
它是一个特殊的异常,不是说 JVM 对其有特殊的处理,而是它的使用场景比较特殊。通常,我们可以看到,像 Object 中的 wait() 方法,ReentrantLock 中的 lockInterruptibly() 方法,Thread 中的 sleep() 方法等等,这些方法都带有 throws InterruptedException,我们通常称这些方法为阻塞方法(blocking method)。
阻塞方法一个很明显的特征是,它们需要花费比较长的时间(不是绝对的,只是说明时间不可控),还有它们的方法结束返回往往依赖于外部条件,如 wait 方法依赖于其他线程的 notify,lock 方法依赖于其他线程的 unlock等等。
当我们看到方法上带有 throws InterruptedException 时,我们就要知道,这个方法应该是阻塞方法,我们如果希望它能早点返回的话,我们往往可以通过中断来实现。
除了几个特殊类(如 Object,Thread等)外,感知中断并提前返回是通过轮询中断状态来实现的。我们自己需要写可中断的方法的时候,就是通过在合适的时机(通常在循环的开始处)去判断线程的中断状态,然后做相应的操作(通常是方法直接返回或者抛出异常)。当然,我们也要看到,如果我们一次循环花的时间比较长的话,那么就需要比较长的时间才能感知到线程中断了。
处理中断
一旦中断发生,我们接收到了这个信息,然后怎么去处理中断呢?本小节将简单分析这个问题。
我们经常会这么写代码:
try {
Thread.sleep(10000);
} catch (InterruptedException e) {
// ignore
}
// go on
public void lock() {
sync.lock();
}
public void lockInterruptibly() throws InterruptedException {
sync.acquireInterruptibly(1);
}
前面我们提到过,lock() 方法不响应中断。如果 thread1 调用了 lock() 方法,过了很久还没抢到锁,这个时候 thread2 对其进行了中断,thread1 是不响应这个请求的,它会继续抢锁,当然它不会把“被中断”这个信息扔掉。我们可以看以下代码:
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
// 我们看到,这里也没做任何特殊处理,就是记录下来中断状态。
// 这样,如果外层方法需要去检测的时候,至少我们没有把这个信息丢了
selfInterrupt();// Thread.currentThread().interrupt();
}
而对于 lockInterruptibly() 方法,因为其方法上面有 throws InterruptedException ,这个信号告诉我们,如果我们要取消线程抢锁,直接中断这个线程即可,它会立即返回,抛出 InterruptedException 异常。
void await() throws InterruptedException;
void awaitUninterruptibly();
通常,如果方法会抛出 InterruptedException 异常,往往方法体的第一句就是:
public final void await() throws InterruptedException {
if (Thread.interrupted())
throw new InterruptedException();
......
}
熟练使用中断,对于我们写出优雅的代码是有帮助的,也有助于我们分析别人的源码。
总结
这篇文章的信息量真的很大,如果你花了时间,还是没有看懂,那是我的错了。


猿灯塔:做程序员的引导者!
新浪微博:@猿灯塔
以上是关于一行一行源码分析清楚 AbstractQueuedSynchronizer 的主要内容,如果未能解决你的问题,请参考以下文章