DCS F-14B Tomcat雄猫战斗机 中文指南 12.2战斗机对战斗机联络
Posted 游戏攻略HB
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了DCS F-14B Tomcat雄猫战斗机 中文指南 12.2战斗机对战斗机联络相关的知识,希望对你有一定的参考价值。
LINK 4A(TAC)与LINK 4C (战斗机对战斗机)
Link 4A 系统是用于飞机控制的全自动高速数据传输系统。该系统利用控制船与被控制飞机之间的无线电传输,向飞机提供控制信息。航母惯性导航系统(CAINS)也是Link-4A 系统的一部分。
另一方面,Link 4C是一个战斗机到战斗机的数据链路,旨在补充 Link 4A ,尽管这两个链路不直接相互通信。

设置TAC(LINK4A)数据链路
(人类RIO)
你可以用JESTER设置数据链模式和Host ,或者人RIO也可以为你这样做。以下是如何与人类RIO。
1.用“RSHIFT+K”打开你的膝盖。这将带您进入地面设置页面。
2.使用“[”和“]”(膝板上一页/下一页绑定)循环浏览页面以查找战术数据链接系统页面。您将看到可用的数据链接主机。
3.设置数据链路电源开关–打开(前)。数据链路正向位置将数据链路设置为 LINK 4A (战术)模式。
4.将数据链路模式设置为TAC (CAINS/WPT用于航母上的INS对准)。
5.将数据链路应答开关设置为NORM,允许飞机接收和发送信息。
6.将数据链路频率设置到所需的网络(在我们的例子中是 E-2C AWACS)。我们期望的频率列在膝板战术数据链系统上,为316.60兆赫。如图所示,将数据链路频率选择轮旋转至16.6(3是预设的,不能修改)。
7.使用“RSHIFT+K”关闭您的膝板。
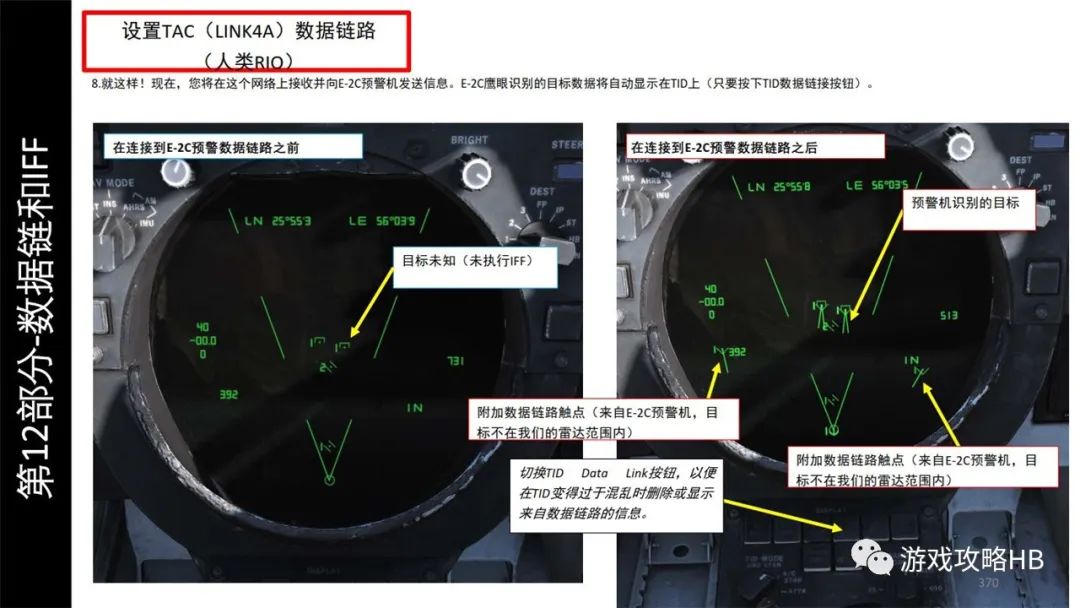
8.就这样!现在,您将在这个网络上接收并向E-2C预警机发送信息。E-2C鹰眼识别的目标数据将自动显示在TID上(只要按下TID数据链接按钮)。
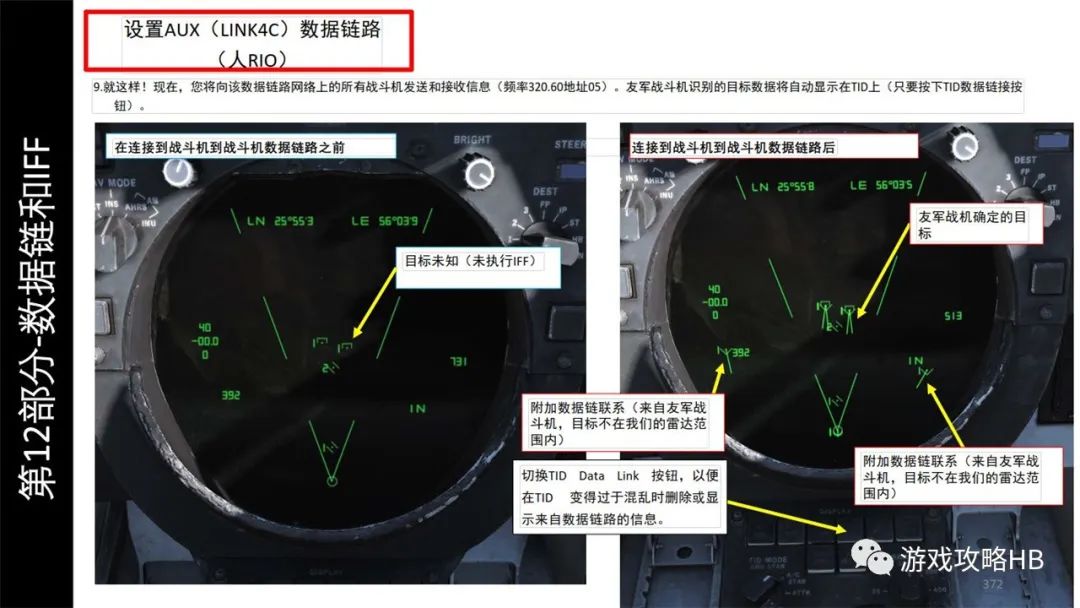
设置AUX(LINK4C)数据链路
(人RIO)
您可以使用 JESTER设置数据模式和主机,或者一个人类RIO也可以为您这样做。下面是如何使用人类RIO。
1.用“RSHIFT+K”打开你的膝板。这将带您进入地面设置页面。
2.使用“[”和“]”(跪板上一页/下一页绑定)循环浏览页面以查找战术数据链接系统页面。您将看到可用的数据链接主机。
3.设置数据链路电源开关-AUXILIARY(后)。数据链路后位置将数据链路设置为辅助链路4C(战斗机对战斗机)模式。
将数据链路模式设置为TAC (CAINS/WPT用于航母上的INS对准)。
7.将数据链路频率设置为所需的网络。我们想要的频率是320.60兆赫。如图所示,将数据链路频率选择轮旋转至20.6(3是预设的,不能修改)。
设置数据链路(JESTER)
你可以用JESTER设置数据链模式和主机,或者人RIO也可以为你这样做。下面是如何处理JESTER:
1.将数据链路模式设置为战术数据链路系统。按两次“A”并选择“数据链路无线电”(LCTRL+7),即可使用JESTER上下文菜单。然后,选择“设置模式”(LCTRL+1)并选择“战术数据链路系统”(LCTRL+1)作为LINK4A模式(预警机、航母)。您也可以选择“战斗机对战斗机”为LIK4C模式(数据链之间的四架战斗机在同一网络上)。
2.将数据链路频率设置为所需的网络。按两次“A”并选择“数据链路无线电”(LCTRL+7),即可使用JESTER上下文菜单。然后,选择“设置主机”(LCTRL+1)并选择所需的数据链路主机(E-2C AWACS、CVN74 Stennis航母等)。
以上是关于DCS F-14B Tomcat雄猫战斗机 中文指南 12.2战斗机对战斗机联络的主要内容,如果未能解决你的问题,请参考以下文章
模拟飞行 F-14B Tomcat雄猫战斗机 中文指南 3.5领航员右前面板